
Fターム[5J070AK16]の内容
レーダ方式及びその細部 (42,132) | 目的(効果) (6,033) | クラッタ消去 (225)
Fターム[5J070AK16]の下位に属するFターム
Fターム[5J070AK16]に分類される特許
81 - 100 / 151
パルスレーダ装置
【課題】従来装置は、連続した同じ周波数の送信パルスに対する受信信号に対して、MTI処理によりクラッタ抑圧処理を行うため、相対速度0m/secの反射物からのクラッタを抑圧できるが、低速移動目標の受信信号も抑圧し、検出性能が劣化する。
【解決手段】パルス繰り返し周期毎に周波数が重複なく所定周波数で変化するパルス列が、繰り返される送信信号を目標方向へ送信し、目標および背景よりの反射信号から送信パルスと同じ周波数を用いて、生成された受信ビデオ信号を用いてMTI処理により背景からのクラッタの抑圧をクラッタ抑圧器で行い、合成帯域器でクラッタ抑圧器による全ての周波数の記送信パルスに対するMTI処理後の信号を用いて、合成帯域処理を行い、検波器で、合成帯域器からの出力の振幅値を求め、合成帯域処理による目標の高分解能測距結果を出力する。
(もっと読む)
レーダ装置

【課題】時空間適応信号処理を適用してクラッタを抑圧する際、演算量の低減化、測距性能及びクラッタ抑圧性能の向上を図るレーダ装置を得る。
【解決手段】局部発振信号を生成する局部発振信号生成部2、局部発振信号を用いてパルスごとの送信周波数をステップ状に変化させた有限個のパルス信号を生成し繰り返し送信する送信部1、送信信号を空間に放射する送信アンテナ部3、目標に反射して到来するパルス状の反射電波を受信する受信アンテナ部4、受信信号のパルスごとに局部発振信号を用いて周波数変換及びI、Q位相検波を行って複素ビデオ信号を生成しAD変換して複素デジタルビデオ信号を出力する受信部6、複素デジタルビデオ信号を用いて高距離分解能化を図る合成帯域処理部7、高距離分解能化を図った信号に対しクラッタを抑圧する時空間適応信号処理部8、時空間適応信号処理部からの出力信号に基づき目標検出処理を行う目標検出部9を備える。
(もっと読む)
移動目標検出装置
【課題】移動目標の検出性能の低下を抑えて、移動目標の検出及び速度推定を実施することができる移動目標検出装置を得る。
【解決手段】プラットフォームの移動方向に分割可能な開口を持つアンテナを用いて取得された2つの受信信号をそれぞれ格納するデータ格納部1、2と、データ格納部1、2に格納されたレーダ画像2枚分の受信信号についてそれぞれ距離方向に圧縮するレンジ圧縮処理部10A、10Bと、2つのレンジ圧縮後のデータをもとに移動目標を検出する移動目標検出部20と、検出された移動目標の各観測時刻におけるアンテナとの距離から目標速度を推定する目標速度粗推定部50とを設けた。
(もっと読む)
目標追尾誘導装置及び方法
【課題】太陽光及び太陽クラッタ光の影響を低減して、シーカが安定した強度の反射光を検出することができ、これにより、レーザ照射機の寸法、質量増を抑えることができ、運搬や設置等の運用上の制限を無くすことができる目標追尾誘導装置及び方法を提供する。
【解決手段】目標1に対しレーザビーム3を照射し、その反射光4を赤外線シーカ16で検出することにより、目標を捕捉し、目標方向に向けて飛翔体14を飛翔させる。飛翔体14は、赤外線シーカ16の前面に設けられた直線偏光子17(偏光フィルタ)と、直線偏光子17を透過可能な直線偏光の偏光方向を送信する送信装置18とを有する。さらに、レーザビーム照射装置12で発生するレーザビーム2の直線偏光の偏光方向をレーザビームのまわりの回転可能な偏光方向回転装置20と、回転後のレーザビーム3の偏光方向を飛翔体の偏光方向に一致させる偏光方向制御装置24とを備える。
(もっと読む)
レーダシステム
【課題】目標を安定して追尾することが可能なレーダシステムを提供する。
【解決手段】Xバンドのレーダ映像中に偽像又はクラッタが存在し、さらに、各ARPA装置8a、8bが同一の目標をそれぞれ追尾している場合に、追尾部17bの目標追尾部26は、Sバンドの目標の位置を指示機16aに送信し、指示機16aの追尾位置比較部44は、受信した指示機16bからの目標の位置と、追尾部17aの目標追尾部26からのXバンドの目標の位置との差分を求め、前記差分が所定の閾値を上回るときに前記差分を追尾部17aの目標追尾部26に出力する。該目標追尾部26は、前記差分を用いて目標の位置を補正する。
(もっと読む)
サーチボリュームの内容物を測定する方法および装置
サーチボリュームの内容物を測定する方法。この方法は、電磁波エネルギーをサーチボリューム内へ送る1以上の送信機を作動する工程、各々がサーチボリューム内の異なる伝搬経路(典型的には単静的又は双静的経路)に関連づけられる2以上の信号を記録することで、サーチボリュームが電磁波エネルギーの通過に与える影響を検出する工程、各々がサーチボリューム内の異なる伝搬経路(典型的には単静的又は双静的経路)に関連づけられるサーチボリューム内の所望のボクセル上に合成して集束される2以上の整列信号を生成するため信号を整列させる工程、整列信号を処理して2以上のデータ値を生成することで、整列信号におけるコヒーレンスの程度を示す品質係数を計算する工程、整列信号を総和して総和信号を生成する工程、及び総和信号を処理して所望のボクセル位置におけるサーチボリュームの内部構造を示し、品質係数に従って変動する出力を生成する工程を含む。  (もっと読む)
(もっと読む)
自動利得制御装置
【課題】自船の位置する海域に応じた利得制御を自動的に行うことができる自動利得制御装置を提供する。
【解決手段】自船位置が、岸壁、防波堤、桟橋、船などの人工構造物が多数存在する港の周辺や港の内部、運河等の海域(港湾エリア)内にあるのか否かを判定部11により判定し、当該判定結果に基づいて閾値算出部12が自動的に閾値算出アルゴリズムを切替える。これにより、洋上においても港内においても、設定変更や感度調整などの操作を実行することなく、最適な感度のレーダ映像を得ることができる。
(もっと読む)
レーダ装置
【課題】不要波環境下であっても目標検出能力を高めることができ、また、処理規模または回路規模を増大させずに目標に対する測距および測角ができるレーダ装置。
【解決手段】位相中心が異なる複数のサブアレイを含むアンテナ1と、複数のサブアレイからのサブアレイ信号に対してICAを行って目標信号と不要波信号を分離するICA処理部2と、分離された信号から目標信号を検出して目標までの距離を計測する信号検出/測距部4と、サブアレイ信号から信号検出/測距部で計測された距離の周りに存在するM個(Mは正の整数)のセルを抽出するMセル抽出部5と、抽出されたM個のセルの信号を用いてモノパルスビームを合成するモノパルスビーム合成部6と、合成されたモノパルスビームにSTAPを適用するSTAP部7と、STAP部においてSTAPが適用されたモノパルスビームを用いてモノパルス測角を行う測角部8を備える。
(もっと読む)
クラッタ判別方法およびレーダ装置
【課題】固定目標、ウェザークラッタ及びシークラッタの判別精度を高めて、固定目標、ウェザークラッタ及びシークラッタを移動目標と誤認する頻度を極小化可能にする。
【解決手段】レーダ装置の探知覆域内を複数の領域(セル)に分割するとともに、当該レーダ装置で受信されMTI及びMTDドップラフィルタ処理後に検出された目標に対して、前記セル単位でレーダスキャン毎の相関判定を実施し、相関判定結果を前記セル単位で累積記憶し、同一又は周辺セルとの相関の連続性が、予め設定したクラッタ判別条件と一致する目標をクラッタと判別する。
(もっと読む)
レーダ装置
【課題】環境によって時々刻々と変化するノイズレベルの情報を生成し、生成した情報に基づいて受信感度調整や相関処理などの処理を行うレーダ装置を提供することを目的とする。
【解決手段】探索領域内に予め定めた分割領域毎にノイズ優勢領域か物標エコー優勢領域かの判定を行い、ノイズ優勢領域と判定された領域の受信信号を用いてノイズレベルを算出する。これにより、物標エコーとノイズとを分離するための適正な値を算出することが可能になる。また、ノイズ優勢領域で算出したノイズレベルを補間或いは外挿することによって他の領域のノイズレベルを算出する。これにより、レーダ探索領域全域にわたって適正なノイズ分布を得ることが可能になる。
(もっと読む)
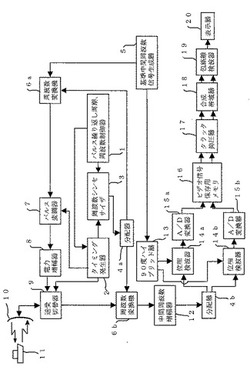
パルスレーダ装置
【課題】アナログ受信信号に含まれる背景信号成分およびシステム内での処理によって信号に重畳する誤差成分を有効に除去する。
【解決手段】
D/A変換器22は、記憶部21から読み出されたデジタル参照背景信号をアナログ化することによって、アナログ参照背景信号を出力する。アナログ減算器13は、アナログ受信信号と、アナログ参照背景信号との減算を行って、アナログ受信信号から背景信号成分を除去したアナログ減算信号を出力する。A/D変換器23は、アナログ減算信号をデジタル化することによって、デジタル減算信号を出力する。補正部24は、記憶部21から読み出されたデジタル補正信号に基づいて、デジタル減算信号を補正し、ターゲットの測距に用いられるデジタル応答信号を出力する。
(もっと読む)
レーダ信号処理装置およびレーダ信号処理方法
【課題】目標をそのドプラ速度によらず検出することの可能なレーダ信号処理装置を提供すること。
【解決手段】CPIごとに算出される目標のドプラ速度から次回のCPIにおける目標の速度を予測する。この目標速度が0でない限りにおいては受信Iチャネル、Qチャネル信号をMTI処理部3に与えてクラッタ除去処理を行うが、予測された目標速度が0であれば、処理切替スイッチ1,2を切り替えることによりMTI処理部3を切り離し、受信Iチャネル、Qチャネル信号を0ドプラフィルタ処理部5に接続する。
(もっと読む)
レーダ装置および類似装置
【課題】海面反射領域を適切に自動検出して、海面反射領域内と海面反射領域外とでそれぞれに応じた異なるスキャン相関処理を自動選択して実行する。
【解決手段】海面反射領域検出部10は、エコーデータに準じて、当該エコーデータに対応する画素が不安定画素であるかどうかを検出する。海面反射領域検出部10は、不安定画素に対して、時間的な不安定状態の延長、および平面的な不安定画素の領域の拡大を行った後に、海面反射領域を決定する。連続性検出部9は、エコーデータに対応する画素の平面的連続性を検出する。Wデータ発生部6は、海面反射領域の内外、連続性の有無に基づいて設定される複数種類の係数からなるスキャン相関処理演算を用いて、今回のエコーデータと画像メモリ7に記憶された前回のスキャン相関処理結果データとから今回のスキャン相関処理結果データを算出し、画像メモリ7へ更新記憶させる。
(もっと読む)
レーダ装置
【課題】目標検出性能を低下させることなく2次エコー抑圧処理を行うことのできるレーダ装置を得る。
【解決手段】送受信部と、信号処理部とを備え、信号処理部は、受信信号に対して送受信部から一定時間前に送信された送信波の位相を打ち消すように位相補正を施す第1の位相補正部7と、第1の位相補正部7による位相補正後の受信信号において、電力の卓越する周波数成分を検出する卓越周波数検出部10と、検出された周波数成分を除去する卓越周波数成分除去部11と、卓越周波数成分除去後の受信信号に対して、第1の位相補正部7による位相補正量の正負を反転させた位相補正量を用いて位相補正を行う再位相変調部13と、送受信部から送信された送信波の初期位相を打ち消すように位相補正を施す第2の位相補正部14と、1次エコー成分の検出を行う1次エコー検出部16とを含む。
(もっと読む)
レーダ装置
【課題】不要波環境下であっても、処理規模または回路規模を極力大きくせずに、目標の距離および方位を観測できるレーダ装置を提供する。
【解決手段】円開口が形成されるように一方向に配置し、且つ該一方向に直交する方向に開口分割した位相中心の異なる複数のサブアレイを含む1次元DBF(Digital Beam Forming)アレイアンテナ1と、1次元DBFアレイアンテナの複数のサブアレイから送られてくるモノパルス合成前のサブアレイ信号に対して複素ICA(Independent Component Analysis;独立成分分析)を行うことにより、目標信号と不要波信号とを分離するICA処理部2と、ICA処理部により分離された目標信号に基づき距離を計測する測距部5を備える。
(もっと読む)
目標追尾装置、目標追尾プログラム及び目標追尾方法
【課題】高分解能センサにより同一目標から複数の検出位置を得るセンサシステムにおいて、検出位置の重心位置精度劣化の低減を図るとともに、目標の航跡の高精度化を目的とする。
【解決手段】検出情報決定部120は、複数の検出装置から取得した検出情報の内、1つの検出装置から取得した検出情報に基づき目標の追尾を行うか、あるいは2つ以上の検出装置から取得した検出情報に基づき目標の追尾を行うかを所定の条件に基づき選択する。また、検出情報決定部120は、選択した結果に基づき、目標の追尾に使用する検出情報を決定する。追尾処理部140は、決定された検出情報に基づき目標を追尾する。
(もっと読む)
信号処理装置
【課題】不要波が存在する環境下であっても、時系列に取得されたデータを用いて不要波成分を抑圧し、高精度、高分解能および/または高感度で目標を観測できる信号処理装置を提供する。
【解決手段】信号を送受信するアンテナ11、21と、アンテナから時系列に取得される受信信号に含まれる不要波成分を、各時刻で取得される受信信号毎に抑圧する不要波抑圧処理部12、13、22、23、30〜3M−1、31と、不要波抑圧処理部から時系列に取得される不要波成分が抑圧された受信信号を用いて信号処理を行う信号処理部33を備える。
(もっと読む)
不要信号抑圧装置
【課題】目標のドップラー周波数が未知の場合でも、別の手段を用いることなく簡易に時空間適応信号処理によりクラッタを抑圧する不要信号抑圧装置を提供する。
【解決手段】不要信号抑圧装置は、移動体に搭載され、レーダの送信アンテナから空中に放射された高周波信号に係り且つ一直線上に等間隔に配置された複数個の素子アンテナ(1)により受信された反射信号に含まれる不要信号成分を抑圧する不要信号抑圧装置において、上記反射信号を受信する方向におけるクラッタのドップラー周波数を拘束から外すような拘束条件下で、上記高周波信号を搬送する搬送波の波長、上記素子アンテナの配置間隔、上記レーダが搭載された移動体の速さ、および上記高周波信号のパルス繰返し周期に基づいて、上記不要信号成分を抑圧する荷重係数を計算する荷重計算部(20)を備えた。
(もっと読む)
3次元高度探知鳥類レーダー用装置および方法
高度探知3次元鳥類レーダーは、アンテナの指向仰角を変更する手段を備える方位角スキャンレーダーを備えている。仰角の変更は、多重ビームを備えたアンテナを用いるか、仰角方向走査手段を用いるか、異なる仰角を指向する2つのレーダーを用いることにより行える。異なる仰角で放射されたビームで探知された鳥などのターゲットからの受信反射波の解析により、ターゲットの高度が特定される。 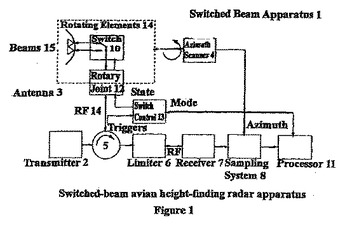 (もっと読む)
(もっと読む)
レーダ装置
【課題】MTI処理による追尾目標の探知においてブラインド速度領域にある探知困難な移動目標が存在した場合にも、初探知を含め探知・追尾を容易に行えるようにする。
【解決手段】目標の探知を探索走査時にはビデオ積分処理系行い、また追尾走査時にはMTI処理系で行うようにし、処理系のビデオ信号にプロット生成処理、目標の予想位置、速度の算出を行い、目標情報作成・管理部により、速度が閾値を超えた目標を追尾の対象目標として抽出して目標情報を作成すると共に、ブラインド速度領域に入る速度を持つ対象目標を抽出し、追尾PRF算出部により当該対象目標の速度のドップラ周波数を算出し、当該ドップラ周波数の1/2程度の値を追尾ビームの送信PRFとして算出して励振受信部に与える。
(もっと読む)
81 - 100 / 151
[ Back to top ]