
Fターム[5J070AK22]の内容
レーダ方式及びその細部 (42,132) | 目的(効果) (6,033) | 高精度化又は分解能の向上 (1,641)
Fターム[5J070AK22]に分類される特許
341 - 360 / 1,641
水稲収量予測モデル生成方法、及び水稲収量予測方法
【課題】圃場にて栽培される水稲の収量予測を現地調査により行うと労力を要し、全国に設置された観測点での気象データによる予測は精度確保が難しく、また、光学リモートセンシングによると天候の影響を受ける。
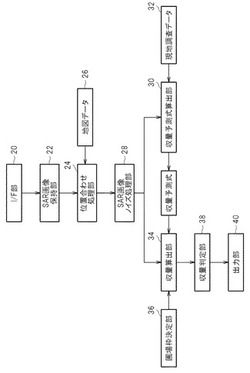
【解決手段】収量予測式算出部30は、SARを用いて広範囲で得られる生育期前半における標本圃場での後方散乱強度と、現地調査により得られる茎数等の水稲の生育的特徴との相関に基づき収量予測式を生成する。収量算出部34は、収量予測式を用い、生育期前半の対象水稲圃場を撮影したSAR画像により得られる後方散乱強度から水稲の生育的特徴の推定値を求める。水稲の収量構成要素である籾数との間で相関を有する水稲の生育的特徴の推定値から、籾数を予測する。
(もっと読む)
電子走査型レーダ装置、受信波方向推定方法及び受信波方向推定プログラム

【課題】演算負荷の重い計算処理を用いることなく、ARスペクトル推定法におけるパラメータに基づいて、適当なモデル次数を設定する電子走査型レーダ装置、受信波方向推定方法及び受信波方向推定プログラムを提供する。
【解決手段】送信波及びターゲットから到来する受信波からビート信号に基づいた複素数データを算出する周波数分解処理部と、ビート周波数の強度値からピーク値を検出してターゲットの存在を検知するターゲット検知部と、アンテナ毎に、前記ターゲットの存在が検知されたビート周波数である検出ビート周波数の複素数データに基づいて生成される異なる次数の正規方程式であって、該正規方程式に基づいて導かれる受信波数に応じて選択された次数の正規方程式に基づいて受信波の到来方向を算出する方位検出部とを備える。
(もっと読む)
目標物管理装置および目標物管理方法
【課題】監視対象範囲を分割した複数の分割範囲ごとに目標物の数量の管理をする。
【解決手段】監視対象範囲を複数の分割範囲に分割した分割範囲ごとに、センサそれぞれの目標物を探知する確率を示す情報またはセンサそれぞれの監視範囲の地形を示す情報を用いて、分割範囲において目標物を探知することができる確率を示す探知率を求め、分割範囲ごとにセンサそれぞれが偽目標物を探知してしまう確率を示す偽探知率を求め、対象の分割範囲に所在する目標物の前回更新した数量に対する最新の数量の増加した数量あるいは減少した数量を求め、増加した場合、増加処理をし、減少した場合に、減算処理をして、対象の分割範囲の目標物の数量を更新することを目標物管理装置である。
(もっと読む)
距離測定装置
【課題】測距対象物の誤認識を防止することができる距離測定装置を提供する。
【解決手段】距離測定装置10は、垂直方向に隣接する計測点までの水平方向の距離差Dが閾値Lより小さい場合に、所定の高さを有する測距対象物が存在すると判定する距離測定装置において、計測点までの水平方向の距離差Dが大きくなるほど閾値Lを大きく設定する設定部2を備える。この距離測定装置10は、計測点までの水平方向の距離差Dが大きくなるほど閾値Lを大きく設定する。これにより、この閾値Lが、所望の測距対象物に関する第一測距値と第二測距値の差Dより小さくなることがなくなるため、所望の測距対象物であっても一定閾値のために測距対象として判定されず誤認識してしまうことを防止することが可能になる。
(もっと読む)
物体検知装置および物体検知方法
【課題】相互に属性が異なる複数の物体の存否、位置、変位または属性の検知ないし測定を簡単な構造により高精度に行うと共に、相互に属性が異なる複数の物体を確実に識別する。
【解決手段】発振器11から発せられる基本送信信号から相互に周波数が異なる複数の単位送信信号を生成し、これらの単位送信信号を合成して合成送信波として送信する。そして、検知対象物に反射した合成送信波の反射波を受信し、この反射波を周波数ごとに分離して複数の単位受信信号を生成し、複数の単位送信信号と複数の単位受信信号とを周波数ごとにそれぞれ重畳することにより形成される複数の定在波のそれぞれの振幅値に基づいて検知対象物の存否、位置、変位および属性を検知する。
(もっと読む)
空港面監視方法及び空港面監視システム
【課題】 複数の目標が接近して一目標と認識してしまう程度の方位分解能である一次レーダであっても、二次レーダを利用して、方位分解能を擬似的に向上させ、近接した複数の目標の誤検出を減少させて、精度の高い航跡(統合航跡)を生成することが可能な空港面監視方法及び空港面監視システムを提供すること。
【解決手段】 一次レーダから得られる目標位置と目標に搭載されたトランスポンダからの返信波を受信する二次レーダから得られる目標位置とを統合して目標位置の経時変化である目標の航跡の精度を向上させる空港面監視方法において、前記二次レーダが検出した二つの目標位置の目標間距離が、前記二次レーダが検出した二つの目標位置における前記一次レーダの分解能よりも小さいときに、前記目標間距離の中間座標及び中間座標の周辺に相当する前記一次レーダによる目標のエコーを間引き、前記一次レーダによる目標位置を検出して目標の航跡を得る。
(もっと読む)
目標追尾装置
【課題】 従来、目標の諸元のみから予測時刻における目標の位置等を予測しているために、追随遅れを生じたり、観測された目標の位置と予測位置の差異が大きくなり、安定追尾をすることが困難となる場合があった。
【解決手段】 目標の移動先となる目的地及び予測経路を目的地の優先度、目標の運動諸元を元に推定し、その目的地に向けた移動経路を等速円運動や比例航法により予測することにより、予測位置と観測される目標との位置差を減少させ、追随遅れの解消や安定した追尾維持や追尾精度向上を実現する。
(もっと読む)
レーダ装置
【課題】安定した相関追尾が可能なレーダ装置を提供する。
【解決手段】FMCW方式のスイープ信号を送受信する送受信器20と、送受信器からの信号に基づき算出された目標の速度によって該目標を速度範囲毎にグルーピングし、速度範囲毎の速度ヒストグラムの度数に基づき自速度を抽出し、自速度を含む速度グループ内でレンジを分割し、分割レンジ毎にクロスレンジのヒストグラムを算出し、算出されたヒストグラムの度数が最大のクロスレンジ位置を算出し、分割レンジ毎に抽出された度数が最大のクロスレンジ位置を用いて曲線フィッティングして反射点の曲線を抽出する速度グルーピング部36と、速度グルーピング部によってグルーピングされた速度グループ毎に相関追尾を行う相関追尾部37を備える。
(もっと読む)
送受信ビーム形成装置
【課題】目標波電力が低い場合にも精度良くビーム形成することができる送受信ビーム形成装置を得る。
【解決手段】送受信ビーム形成装置は、分配器の出力にそれぞれ送信ビーム荷重を乗算する送信用乗算器と、受信器の出力に受信ビーム形成荷重を乗じる受信用乗算器と、受信用乗算器の出力を合成する合成手段と、合成手段の出力のSNRが最大化するような受信ビーム形成荷重を算出するとともに算出した受信ビーム形成荷重で受信用乗算器を制御する受信荷重制御手段と、受信荷重制御手段で算出された受信ビーム形成荷重を送信ビーム形成荷重とするとともに送信ビーム形成荷重で送信用乗算器を制御する送信荷重制御手段と、を備えた。
(もっと読む)
レーダ装置
【課題】測角精度を向上できるレーダ装置を提供する。
【解決手段】複数の素子を有し、複数の素子が順番に複数の第1素子12aと第2素子11aと第3素子11a´と複数の第4素子12a´とに分割されたアンテナ10と、観測角度範囲全体を第2素子と第3素子とで覆うビームを形成し、所定角度を中心とする所定範囲を複数の第1素子と複数の第4素子とで覆うビームを形成し、複数の素子全体で所定角度を中心とする所定範囲内の任意の方向にビームを形成するビーム成形部34と、ビーム成形部で形成されたビームに基づきモノパルス測角を行う測角部37とを備える。
(もっと読む)
画像処理装置、レーダ装置、画像処理方法および画像処理プログラム
【課題】表示に視覚的な違和感が生じないように代表位置を決定する手法を実現した画像処理装置を提供する。
【解決手段】画像処理部17は、画像メモリ16から入力した画像データとテンプレート画像データとのマッチングを行う。例えば、一致度が最も高いテンプレート画像データを選定する。各テンプレート画像データには、それぞれ位置データが定めれており、画像処理部17は、選定されたテンプレート画像データに対応付けられている位置データに基づいて、入力した画像データの代表点を設定する。
(もっと読む)
移動物体の監視システム
【課題】監視する必要のある移動物体をより的確に監視できるようにする。
【解決手段】漏洩伝送装置を伝送媒体として漏洩伝送装置の両端の一方の端側から他方の端側へ第1の送信信号を送出する第1の機器100、漏洩伝送装置を伝送媒体として漏洩伝送装置の両端の他方の端側から一方の端側へ第2の送信信号を送出する第2の機器200、及び第1及び第2の漏洩伝送路301,302の一方の漏洩伝送路から第1の送信信号が放射した第1の電波が監視対象の移動物体に反射した第1の反射電波を漏洩伝送装置を介して受信した第1の受信信号の変化と第1及び第2の漏洩伝送路の一方の漏洩伝送路から第2の送信信号が放射した第2の電波が監視対象の移動物体に反射した第2の反射電波を漏洩伝送装置を介して受信した第2の受信信号の変化との違いに基づいて監視対象の移動物体の2次元の動きを検知する検知部400を備えている。
(もっと読む)
目標追尾装置及びコンピュータプログラム及び目標追尾方法
【課題】比較的狭い範囲内に複数のピーク画素がある場合でも、少ない計算量で精度の高い相関処理をする。
【解決手段】ピーク画素抽出部132は、目標画素のなかから、隣接する画素よりも画素値が大きい画素(ピーク画素)を抽出する。特徴位置算出部133は、目標の特徴を表わす特徴点の位置(特徴位置)を算出する。特徴距離算出部134は、ピーク画素の位置と特徴位置との間の距離(特徴距離)を算出する。特徴方位算出部135は、ピーク画素の位置から見た上記特徴位置の方位(特徴方位)を算出する。相関処理部140は、特徴距離と特徴方位とを含む相関パラメータに基づいて、相関処理をする。
(もっと読む)
送信装置、送信方法、受信装置、受信方法、物標探知装置、および物標探知方法
【課題】2次エコーや干渉を抑圧し、物標による真の像のみを正確に探知できる物標探知装置を実現する。
【解決手段】送信部12は、短パルス信号PSと中パルス信号PMとを含むパルス列PGを、所定のパルス列繰り返し周期PRIで繰り返しながら送信する。少なくとも1つのパルス列PGでは、それぞれのパルス列PGの開始タイミングを基準にしてパルス列PG内での短パルス信号PSおよび中パルス信号PMの送信タイミングとが異なるように設定されている。受信信号処理部14は、このようなパルス列PGの各パルス状信号の受信データを取得し、それぞれのパルス列PGの開始タイミングを基準にした各パルス状信号の時間的位置が一致するように、受信データを置き換える。そして、受信信号処理部14は、置き換えた受信データをパルス列PG間で比較し、パルス列PG間での再現性等を得ることで、2次エコーや干渉と真の像とを識別する。
(もっと読む)
レーダ装置、及び方位検出方法
【課題】異なるターゲットに対応する周波数スペクトルが重なった場合でも、各ターゲットの方位を正確に算出可能なレーダ装置に関する技術を提供することを課題とする。
【解決手段】送信波が静止ターゲットと移動ターゲットを含むターゲットで反射された反射波を少なくとも2つの受信アンテナの受信信号として受信し、送信信号と受信信号から生成されるビート信号のピーク周波数の位相差を算出し、この位相差に基づいてターゲットの方位を算出する。ターゲットの方位の算出は、方位算出部で算出された静止ターゲットの位相差を記憶領域に記憶しておき、複数のターゲットのピーク周波数が重なるか否かを予測し、記憶される位相差に基づいて、ピーク周波数が重なる際の静止ターゲットの予測位相差を算出し、算出された位相差と静止ターゲットの予測位相差に基づいて移動ターゲットの予測位相差を算出し、ターゲットの方位を算出する。
(もっと読む)
レーダ信号処理装置
【課題】本発明は、パルス圧縮レーダにおいて、近距離用と遠距離用との異なる受信信号を合成して所定の信号処理の対象とするレーダ信号処理装置に関し、多様なパルス圧縮レーダの性能、仕様およびターゲットの分布に柔軟に適応し、広範なレンジに亘ってターゲットの探知を安定に実現できることを目的とする。
【解決手段】パルスレーダ方式に適合する第一の受信信号と、前記第一の受信信号とのレンジの対応が図られ、かつパルス圧縮レーダ方式に基づくパルス圧縮の下で得られた第二の受信信号とについて、パルス幅または占有帯域と尖頭電力との積の比に亘ってレベルの差を補正し、前記第一の受信信号に対応する第一の補正信号と、前記第二の受信信号に対応する第二の補正信号とを生成する補正手段と、前記レンジに対応した重みで前記第一の補正信号と前記第二の補正信号とを加算し、後続する信号処理の対象とする合成手段とを備える。
(もっと読む)
レーダ装置、飛翔体誘導装置及び目標検出方法
【課題】ステップ周波数合成帯域レーダのレンジ分解能、複数目標分離性能を損なわずに1パルスをチャープパルスとした合成帯域レーダを実現し、かつ目標の検出を安定して行えるようにした。
【解決手段】FFT部6、圧縮係数乗算部7及びIFFT部8−1にてパルス圧縮を施し、代表値抽出部11−1にて得られたパルス代表値を再変換部12により再度フーリエ変換し、加算部13にてこのフーリエ変換出力を圧縮係数乗算部7の出力から減算し、この減算出力をIFFT部8−2にて逆フーリエ変換して再度パルス圧縮を施して、ピーク検出部9−2及び代表値抽出部11−2によりパルス圧縮後波形のピーク毎のパルス圧縮レンジを検出するようにして、パルス圧縮・代表値抽出部14におけるパルス代表値の演算を二重に行うようにしている。
(もっと読む)
機体座標において目標に対する干渉角を決定するための方法および装置
【課題】航空機機体座標内で目標への物理的角度を求めるためにレーダエコーデータを処理する方法を提供する。
【解決手段】このレーダエコーデータはアンビギュオウスレーダチャネル(226)と左のレーダチャネル(224)で受信されるレーダエコーデータ間の位相差、右のレーダチャネル(228)とアンビギュオウスのレーダチャネル(226)で受信されるレーダエコーデータ間の位相差、および右のレーダチャネル(228)と左のレーダチャネル(224)で受信されるレーダエコーデータ間の位相差を含む。本方法は3つの位相差について位相バイアスを調節するステップ(570、572、574)と、3つの位相差間の位相のアンビギティーを解析することで信号を供給するステップ(576)と、航空機機体座標内で目標への物理的角度を与えるためにその信号をフィルタ処理するステップ(578)とを含む。
(もっと読む)
レーダ装置
【課題】高精度に目標を観測できるレーダ装置。
【解決手段】測距・測角部35はFMCW変調されたダウンチャープMd回とアップチャープMu回を繰り返すMd及びMuスイープ信号から各スイープ信号の極大値を算出する際にMd及びMuスイープの位相モノパルスによりビート周波数を算出し、ビート周波数(距離)−スイープ軸においてビート周波数毎にスイープ方向に振幅積分し、スレショルドを超えたダウン及びアップチャープの周波数バンク毎にスレショルドを超えたスイープ番号の相対距離とスイープ時刻により最小2乗直線でフィッティングし、最小2乗直線の勾配より算出されたダウン及びアップチャープの速度と距離とから求めたアップ及びダウンチャープの周波数を中心とした所定のゲートサイズ内に前記周波数バンクの少なくとも一方が存在するときの周波数バンクを用いて距離と速度を算出する。
(もっと読む)
レーダ偽像除去処理装置及び方法
【課題】レーダにおいて、離散的にしか帯域を使用できない場合においても、ターゲットの偽像を除去して、連続的な広帯域を使用した場合と等価の効果を得る。
【解決手段】受信信号を出力する一時記録部10と、外連続的な帯域の相関関数を出力する全帯域用全帯域用相関関数生成部11と、前記相関関数と前記受信信号との相関処理を行って第1の処理信号を出力する全帯域用処理部12と、送信信号と同じ離散的な帯域の相関関数を出力する離散帯域用相関関数生成部13と、前記相関関数と前記受信信号との相関処理を行って第2の処理信号を出力する離散帯域用処理部14と、前記第1の処理信号と前記第2の処理信号とを重ね合わせ処理することにより、前記第2の処理信号に包含される前記第1の処理信号の部分信号を、実際のターゲット信号として採用することにより、ターゲット信号の偽像である信号を除去処理する重ね合わせ処理部15とを有する。
(もっと読む)
341 - 360 / 1,641
[ Back to top ]