
Fターム[5J070AK22]の内容
レーダ方式及びその細部 (42,132) | 目的(効果) (6,033) | 高精度化又は分解能の向上 (1,641)
Fターム[5J070AK22]に分類される特許
281 - 300 / 1,641
移動無線測位装置
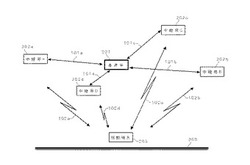
【課題】移動端末の位置を高精度で測位できる移動無線測位装置を安価に実現する。
【解決手段】基準局201の周辺に間隔をおいて複数の中継局202a〜202dを配置し、前記基準局201と複数の中継局202a〜202dとの間を伝送ケーブル101a〜101dを介して接続し、前記基準局201と移動端末203との間で前記複数の中継局202a〜202dを介して双方向通信を行うことによって、前記移動端末203の位置を測位する。
(もっと読む)
電子走査型レーダ装置、受信波方向推定方法及び受信波方向推定プログラム

【課題】検出精度を低減させることなく、高い精度で受信波の到来方向の検出を行う電子走査型レーダ装置、受信波方向推定方法及び受信波方向推定プログラムを提供する。
【解決手段】周波数分解処理部22は、送信波及びターゲットから到来する受信波からビート信号に基づいた複素数データを算出する。ターゲット検知部31は、ビート周波数の強度値からピーク値を検出してターゲットの存在を検知する。ターゲット連結処理部32は、現在及び過去の検知サイクルにおいて検出される前記ターゲットを関連付ける。方位検出部30は、複素数データに基づく生成複素数データを、データ生成手段に対応させて生成し、アンテナ毎に、ターゲットの存在が検知されたビート周波数の複素数データ、及び、生成複素数データを用いてそれぞれ作成された正規方程式に基づいて受信波の到来方向を算出する。
(もっと読む)
パルス変調装置及びパルス変調方法
【課題】パルス変調後の信号の立上り及び立下りにおいてジッタが発生しないようにする。
【解決手段】 入力信号の周期を1/Nに分周するN分周回路3と、N分周回路3からの信号に同期して変調パルス信号を発生させる変調パルス発生回路4と、入力信号を変調パルス信号に同期してパルス変調するパルス変調回路5と、を備える。
(もっと読む)
レーダ装置及び目標探知方法
【課題】被探知目標を正確に探知する開口合成技術を実現する。
【解決手段】レーダ装置は、複数の受信アンテナで受信された各エコー信号から生成された各ベースバンド信号に対して、等しい空間位相を与える送信アンテナ及び受信アンテナの組み合わせから得られる各ベースバンド信号を基準として開口合成を適用することにより、合成ベースバンド信号ベクトルを生成する信号合成部と、複数の送信アンテナのアレイ多項式と複数の受信アンテナのアレイ多項式との積から得られる合成アレイ多項式の各項の係数を用いることにより補正データを取得する補正データ取得部と、この補正データを用いて当該合成ベースバンド信号ベクトルを補正する補正部と、この補正部により補正された合成ベースバンド信号ベクトルを用いることにより角度推定を行う推定部と、を備える。
(もっと読む)
ミリ波撮像装置
【課題】人体などの被写体から放射されるミリ波帯の熱雑音を受信することにより、被写体を撮像するミリ波撮像装置において、被写体の配置領域内に外部から入射した熱雑音の影響を受けることなく、鮮明な被写体像が得られるようにする。
【解決手段】被写体2となる人体から放射されるミリ波帯の熱雑音を受信することで、被写体2の画像を撮像するミリ波撮像装置において、撮像時に被写体2が位置する被写体配置領域(検査対象領域)を挟んで、撮像装置本体10とは反対側に、遮蔽板4を設ける。遮蔽板4は、外部から検査対象領域内に侵入した熱雑音が、撮像装置本体10に入射するのを防止するためのものであり、熱雑音を反射可能な金属板若しくは熱雑音を吸収可能な電波吸収体にて構成する。
(もっと読む)
広帯域パルスレーダの距離計測方法
【課題】精度の高い距離計測が可能な広帯域パルスレーダの距離計測方法を提供する。
【解決手段】広帯域パルスレーダ信号の目標物からの反射波受信信号に対して各々異なる基底関数を使用する複数のウェーブレット変換を行なって各々ピーク値を算出する(ステップ23A,23B)。算出されたピーク値に補正を行ない(ステップ24)、この補正されたピーク値に基づいて距離算出を行なう。
(もっと読む)
レーダ処理装置
【課題】信号処理に最大限の処理時間を費やせるレーダ処理装置を得る。
【解決手段】観測諸元を管理してレーダによる観測を制御する観測制御部1と、複数の追尾処理単位の情報を格納する追尾処理データベース4と、受信信号を信号処理する信号処理部2と、目標の追尾処理を行う追尾処理部3と、観測緒元に基き、追尾処理データベース4から対象とする追尾処理単位の情報を取り出して追尾処理単位の処理時間の上限値を算出し、算出した追尾処理単位の処理時間の上限値及び観測諸元を出力する追尾処理負荷予測部5と、予め設定されているレーダが電波を受信してから追尾結果を出力するまでの時間の上限値から、前記追尾処理単位の処理時間の上限値を引いて信号処理に費やせる処理時間を算出し、算出した信号処理の処理時間及び前記観測緒元に基づいて、信号処理の処理時間を規定するパラメータを変更して信号処理部2へ出力する信号処理内容変更部6とを設けた。
(もっと読む)
移動体周辺監視システム
【課題】複数の距離測定センサを備えた移動体周辺監視システムにおいて、各距離測定セ
ンサにより高精度に障害物までの距離を測定し、しかも、製造コストを低減する。
【解決手段】移動体周辺監視システムにおいて、センサ制御装置は、各距離測定センサに
よる距離測定範囲に対応した周波数掃引幅の掃引パターンを記憶している。センサ制御装
置は、各距離測定センサに、その取付位置に応じて距離測定範囲を設定し、その距離測定
範囲に対応する周波数掃引幅の掃引パターンP1、P2、P3に従ってセンサ内の信号源
の発振周波数を掃引させる。これにより、各距離測定センサの取付位置に応じた夫々の距
離測定範囲で各距離測定センサにより高精度に距離を測定することができる。しかも、上
記掃引パターンはセンサ制御装置が記憶しているので、各距離測定センサはその構成を共
通化することができる。
(もっと読む)
先行車検出装置
【課題】従来に比して正確に先行車の位置を検出可能な先行車検出装置を提供する。
【解決手段】自車両の前方を走行する先行車の位置を検出する先行車検出装置であって、少なくとも先行車の左右方向の位置情報を検出する先行車位置検出手段と、現時点において検出した位置情報を補正するフィルタ補正手段と、先行車の走行状態を推定する先行車走行状態推定手段と、フィルタ補正手段による補正の度合いを、先行車走行状態推定手段によって推定された先行車の走行状態に応じて変更するフィルタ制御手段とを備える先行車検出装置である。
(もっと読む)
車載用レーダ装置及び車載用レーダシステム
【課題】多周波変調異常を検出する機能を有する車載用レーダ装置を提供する。
【解決手段】2周波CW変調処理部101のように、送受信信号のIF信号に位相差が発生するような変調処理方式と、FM変調処理部102のように、送受信信号から得られるドップラ周波数がターゲット距離に応じて変動するような特性を持つ変調方式を有し、前記位相差から算出されるターゲット距離と、前記ドップラ周波数の変動量から算出されるターゲット距離の差分が所定値以上になった場合、多周波変調処理が異常であると判断することができる。
(もっと読む)
移動体周辺監視システム
【課題】送信波を放射することにより障害物を検知する複数の検知センサを備えた移動体周辺監視システムにおいて、各検知センサ間の干渉を抑制し、検知精度の向上を図る。
【解決手段】各検知センサ2は、信号源20の発振周波数を掃引する周波数制御回路21と、上記発振周波数と同じ周波数の送信波を放射する送受信回路22と、電源制御回路24とを備える。電源制御回路24は、上記発振周波数が掃引される期間だけ、上記送信出力をオンし、他の期間は、上記送信出力をオフする。従って、いずれかの検知センサ2で上記発振周波数が掃引され上記送信出力がオンであるときに、他の検知センサ2で上記発振周波数が掃引されていなければ、他の検知センサの上記送信出力はオフされている。このため、各検知センサ2の送信波又は反射波と他の検知センサの送信波又は反射波との間の干渉の発生を防ぐことができ、検知センサ2の検知精度の向上を図ることができる。
(もっと読む)
追尾装置
【課題】大目標と小目標との観測値の取り合いによる追尾性能の劣化を回避し、高精度の航跡を生成可能な追尾装置を得る。
【解決手段】センサ10と、位置相関マトリクスを生成する位置相関処理部20と、セル数相関マトリクスを生成するセル数相関処理部30と、位置相関マトリクスおよびセル数相関マトリクスを用いて相関調停結果を生成する相関調停処理部40と、相関調停結果を用いて観測値クラスタを生成する位置クラスタリング処理部50と、統合セル数観測値を監視する統合セル数観測値監視処理部 60と、カルマンフィルタにより統合セル数推定値および更新後の統合セル数予測値を生成する統合セル数更新予測処理部70と、カルマンフィルタにより航跡の位置速度予測値および位置速度推定値を生成する位置速度更新予測処理部80と、遅延処理部90と、表示処理部100と、を備える。
(もっと読む)
電波探知装置
【課題】精度よく電波発信源の個体識別を行うことができる電波探知装置を得ることを目的とする。
【解決手段】電波発信源特定部14が、指向性アンテナ制御部13により指向性アンテナ3が電波の到来方位θmに指向されたのち、アンテナパターン検出部6bにより検出されたアンテナパターンΣ(θm,φ)を取得し、データベース部7により登録されている複数のアンテナパターンの中で、その取得したアンテナパターンΣ(θm,φ)と最も類似しているアンテナパターンを探索して、そのアンテナパターンを有する電波発信源1を特定する。
(もっと読む)
目標検出装置
【課題】演算負荷の低減を図った上で移動目標の検出精度の向上を実現する目標検出装置を得る。
【解決手段】パルスヒット毎ビデオ信号を生成するパルス圧縮手段(1)と、パルスヒット毎ビデオ信号の1CPI分に対してコヒーレント積分を行い、レンジ−ドップラー周波数空間で構成された1CPI分のビデオ信号を生成するCPI毎コヒーレント積分手段(2)と、1CPI分のビデオ信号に基づいて、CPI間での検出セルの推移を探索し、推移履歴を生成する探索処理部(100)と、推移履歴に基づいて、パルスヒット毎のビデオ信号の各検出セルを初回パルスヒット時のセル位置へ補正し、補正後のパルスヒット毎のビデオ信号に対してパルスヒット方向にフルコヒーレント積分処理を行う積分処理部(200)と、積分処理後のビデオ信号に対して閾値処理を行うことで、移動目標の検出を行う閾値処理手段(4)とを備える。
(もっと読む)
区画線検出装置および区画線検出方法
【課題】電磁波を送受信した結果に基づき区画線の検出を行う装置において、検出精度を向上させる。
【解決手段】近距離スキャンの1ライン分の測定データ(強度データ,距離データ,スキャン角度)を読み込み、読み込んだ強度データ列および距離データ列のそれぞれを微分することで、微分強度データ列および微分距離データ列を求める(S110〜S120)。微分強度データ列において正レベル,負レベルが連続し且つヌルレベルに挟まれた領域を候補範囲として抽出し(S130)、その抽出した候補範囲の中から、微分距離データ列の極性が、候補範囲に対応する部位で正,負,正(第1スキャン領域の場合)、又は負,正,負(第1スキャン領域の場合)と変化するものを、区画線からの反射が得られた対象領域として抽出する(S140)。
(もっと読む)
レーダ装置
【課題】クラッタの比較的強い環境下で観測信号を取得した場合でも、高精度に目標信号を抽出することのできるレーダ装置を得る。
【解決手段】電波を送受信して観測信号を取得するレーダ信号取得部10と、観測信号に基づき、抽出対象となる目標の大きさのウィンドウを用いた移動平均処理により各レンジビンにおける平均値を算出する移動平均処理部40と、移動平均処理部40で算出した各レンジビンの平均値を比較し、目標信号が位置する領域を抽出する目標信号切出し処理部50と、目標信号切出し処理部50からの出力結果を格納する出力格納部60とを備えている。
(もっと読む)
レーダ装置
【課題】 従来のレーダ装置では、方位角、仰角によらず同じ抑圧帯域幅を持つクラッタ抑圧フィルタを使用していたため、特にアンテナビームが正面方向の場合において低速接近目標や横行目標、離隔目標に対する目標検出感度が劣化するという課題があった。
【解決手段】 アンテナビームの方位角および仰角の情報を抽出し、アンテナビーム角度によって変化するクラッタ形状に応じて最適なフィルタ荷重を決定することで、アンテナビームが正面方向の場合においても低速接近目標や横行目標、離隔目標に対する目標検出性能の改善を図ることができる。
(もっと読む)
レーダ装置
【目的】
本発明は、レーダ,センサ装置に関し、レーダ表示をリアルタイムに実施できるよう、高い方位分解能が得られるにもかかわらず処理量が少ないレーダ装置を実現することを目的とする。
【構成】
左右2つの受信アンテナ及びそれぞれに対応する受信機を持つレーダ装置であって、前記2つの受信機からの受信信号を同相で加える主ビーム信号と逆相で加える差ビーム信号を生成する信号生成部と差ビーム信号に任意の倍率を与え、主ビーム信号と比較を実施する信号比較部と、比較した結果、主ビーム信号が大きくなる場合のみ信号レベルを保持し、小さくなる場合は信号レベルを無くす処理を実施する信号検出処理部を持つことを特徴とするレーダ装置。
(もっと読む)
レーダ装置
【目的】
本発明は、レーダ,センサ装置に関し、比較的簡単な処理を使用し、高い方位分解能が得られ、処理時間をかけずレーダ表示に必要であるリアルタイム処理を実現することを目標としたレーダ装置を実現することを目的とする。
【構成】
左右2つの受信アンテナ及びそれぞれに対応する受信機を持つレーダ装置であって、前記2つの受信機から位相データを検出する位相検出部と、アンテナ形状によって角度補正量を計算する角度補正計算部と、前記位相検出部により検出された2つの位相データの差分より任意の位相を検出する角度検出部と、前記角度検出部によって検出された目標検出角度信号として出力した信号に対し前記角度補正計算部によって求まる角度補正を実施する角度補正実施部と、からなることを特徴とするレーダ装置。
(もっと読む)
予測装置及び予測システム及びコンピュータプログラム及び予測方法
【課題】観測対象の将来の位置を高い精度で予測する。
【解決手段】観測装置810(位置観測装置)は、移動体(観測対象)の位置を観測する。ジャイロセンサ820(角速度観測装置)は、移動体の角速度を観測する。バイアス補正部141(角速度誤差推定装置)は、観測装置810が観測した位置に基づいて、ジャイロセンサ820が観測した角速度の誤差を推定する。バイアス補正部141(角速度補正装置)は、推定した誤差に基づいて、ジャイロセンサ820が観測した角速度を補正する。運動状態外挿部180(予測位置算出装置)は、バイアス補正部141が補正した角速度に基づいて、移動体の将来の位置を予測する。
(もっと読む)
281 - 300 / 1,641
[ Back to top ]