
Fターム[5J070AK22]の内容
レーダ方式及びその細部 (42,132) | 目的(効果) (6,033) | 高精度化又は分解能の向上 (1,641)
Fターム[5J070AK22]に分類される特許
261 - 280 / 1,641
レーダ装置、アンテナ制御方法、及びプログラム
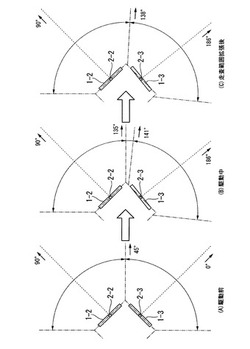
【課題】アンテナ開口の方位の変更動作を行う際に、消費電力を抑えつつ、追尾を継続する。
【解決手段】アンテナ開口の方位の変更のために空中線部1−3を駆動させると、空中線部1−2のビーム走査範囲の端から空中線部1−3のビーム走査範囲の端までの範囲が、走査されない範囲となる。空中駆動部1−3を駆動させている間、空中駆動部1−3の駆動によって発生する走査されない範囲をカバーし、かつ空中駆動部1−2、1−3同士のビームの走査範囲が重複しないように、空中駆動部1−2、1−3のそれぞれのビームの走査範囲を逐次変更する。
(もっと読む)
レーダ装置

【課題】異なる位置で反射されたレーダ波の合成波を受信した場合に、その合成波を各反射点を認識できる程度に分離し、各反射点までの距離を算出することができるレーダ装置の提供。
【解決手段】物標との距離を検出するレーダ装置であって、レーダ波を送信する送信手段と、上記レーダ波が物標で反射されたときの反射波を受信する受信手段と、上記受信手段で受信された反射波をウェーブレット解析することにより、反射波受信時刻と受信した反射波のエネルギーとの関係を表す波形を求める解析手段と、上記解析手段で求めた波形のエネルギーピーク部に対応する反射波受信時刻に基づいて物標との距離を求める距離算出手段と、を備える。
(もっと読む)
クラッタ抑圧装置とレーダ装置
【課題】広帯域レーダのレンジプロファイルから固定クラッタを効果的に抑圧するクラッタ抑圧装置の提供。
【解決手段】レーダの検出パルスの反射波のレンジプロファイルが受信されると、区間閾値判定手段12は各レンジプロファイルをセルに区画し、各セルのセル内における反射波の強度の平均値が所定の閾値Thを超えたか否かを判定する。生起確率算出手段13は、所定数の検出パルスについて、セル毎に閾値Thを超えた回数を計数し、当該計数値から、各セルにおいて、一定時間内に反射波の強度の平均値が閾値Thを超える生起確率を算出する。加重積分処理手段14は、所定数のレンジプロファイルについてセルごとに、当該セルに対する生起確率を重み係数として加重積分することによって、積分レンジプロファイルを出力する。
(もっと読む)
信号処理装置、レーダ装置、信号処理方法、および信号処理プログラム
【課題】干渉以外のエコーに対する抑圧を低減しつつ、干渉成分を的確に除去することができる信号処理装置を提供する。
【解決手段】スイープ間のレベル変化(例えば差分値)を検出し、基準パターンに照合してレベル変化パターンを出力する。スイープデータx(n)に対して、スイープデータx(n+1)が大きくなるパターン(パターンP)、スイープデータx(n)に対して、スイープデータx(n+1)が小さくなるパターン(パターンN)、それ以外のパターン(パターンZ)に分類する。干渉検出部153は、レベル変化パターンのうち少なくとも2つのレベル変化パターンに基づいて干渉を判定する。例えば、注目スイープデータx(n)の1つ前のスイープデータx(n−1)との変化パターンがパターンPであり、1つ後のスイープデータx(n+1)との変化パターンがパターンNである場合、干渉であると判定する。
(もっと読む)
レーダ信号処理装置
【課題】 振幅検出後の閾値処理によりノイズの誤検出を防ぐことで、真の目標となり得る信号の候補を減らした上で、受信信号のレンジ及び強度の挙動観測により真の目標とJEMを判別することで、JEMが検出され続けることを防ぎ、JEMが検出されたセルの周辺セルにおける目標検出性能の劣化を防ぐことが可能なレーダ装置を得る。
【解決手段】 振幅検出出力に対して真の目標の候補としてノイズを誤検出することを防ぐ閾値処理を施す閾値処理器109と、振幅検出出力に対して、目標をトラッキングし、そのレンジ及び受信信号強度の挙動を継続して観測する事により真の目標とJEMとを判別する目標判別器110と、目標判別結果を閾値処理器にフィードバックするフィードバック処理111と、目標判別結果を元に、真の目標を検出する目標検出器112と、上記閾値処理器と目標判別器とフィードバック処理を備える。
(もっと読む)
航法支援装置
【課題】本発明は、複数のフィルタを併用することにより目標の位置、距離、速度、方位の何れかを得る航法支援装置に関し、構成が大幅に複雑化することなく、精度を高めることを目的とする。
【解決手段】目標から到来した受信波に基づいて前記目標の位置、距離、速度、方位の全てまたは一部の予測および推定を個別に行う複数N個のフィルタと、前記目標の特徴を得る特徴識別手段と、前記複数N個のフィルタ毎に特性が前記特徴に整合するほど値が大きく、かつ前記複数Nのフィルタに個別に対応する重みW1〜WNを設定する重み設定手段と、前記複数のフィルタによって行われた推定の結果と前記重みW1〜WNとの積和として前記目標の位置、距離、速度、方位の全てまたは一部を得る重み付け手段とを備える。
(もっと読む)
レーダ信号処理装置
【課題】アジマス分解能の低下を最低限に抑え、かつ偽像の少ない画像を得るレーダ信号処理装置を提供する。
【解決手段】レーダ装置の受信信号を入力し、ドップラー周波数帯域の異なる合成開口処理を施した複数のレーダ画像を生成する第1の手段(図1、2 001a〜b、002a〜b、図4 001、002、)と、それぞれのレーダ画像の分解能が同じになるようにアジマス方向の空間平均処理を施す第2の手段(図1、2 003a〜b、004、005、図4 003、005a〜b、009、008)と、空間平均処理を施したレーダ画像の差異を求めて抽出する第3の手段(図1、2 006、図4 006、010、011)と、を備えた。
(もっと読む)
速度が曖昧な物標の非コヒーレント積分のための技法
【課題】パルスドップラーレーダ信号を処理して物標を検出するための方法を提供する。
【解決手段】周波数ダイバーシティを有する信号を含む所定の周波数技術に従って、レーダシステムからレーダ信号を送信し、1つの周波数帯域内で、物標の速度を指示する周波数を有する物標エコー信号を含む信号を受信し、可変周波数スケールを有するフーリエ変換を用いて物標エコー信号を変換することを含む。
(もっと読む)
車両用除雪装置および車両用除雪システム
【課題】無駄なエネルギーの消費を防ぎつつ、センサ等の性能等を劣化させる積雪を防ぐことを可能とする、車両用除雪システムを提供する。
【解決手段】自車両に備えられた車両用除雪装置であって、上記自車両の位置情報を取得する位置情報取得手段と、上記自車両の位置を含む領域の気象情報を取得する気象情報取得手段と、上記気象情報取得手段によって取得した上記領域の気象情報と、上記位置情報取得手段により取得した上記自車両の位置情報に基づいて、上記自車両の位置情報が降雪エリアに関連があるかどうかを判断する判断手段と、上記自車両への積雪を除去する除雪手段と、少なくとも上記判断手段による判断結果に基づいて、上記除雪手段を制御する制御手段とを備える。
(もっと読む)
レーダ装置
【課題】S/N比を改善し測距精度の向上を図った多周波パルス方式のレーダ装置を提供する。
【解決手段】電力の小さい近距離用パルスと電力の大きい遠距離用パルスを送信周波数を変えながら交互に送信し、目標で反射した近距離用パルスと遠距離用パルスをそれぞれ異なる周波数の帯域制限を与えて通過させた後出力する送受信系1〜6と、前記送受信系の出力から前記目標までの距離を測距する測距系7〜11と、を備えたレーダ装置。送受信系が、近距離用パルスと遠距離用パルスを生成して送信させると共に遠距離用パルスと近距離用パルスを切り換えるときに送信周波数をステップさせる合成帯域型の送信機1を含む。
(もっと読む)
物体検知装置
【課題】物体を迅速かつ精度良く検知する。
【解決手段】物体検知装置10は、車両(自車両P)の左前部および右前部に配置されて車両(自車両P)の前方領域全体を1回で走査可能な広角の右レーダ11Rおよび左レーダ11Lと、処理装置12とを備える。右レーダ11Rは、車両(自車両P)から前後方向前方に所定距離だけ離れた位置に存在する所定の先行車両Qに対して、右レーダ11Rの検出領域ARの左端と先行車両Qの後部左端QLとが一致するようにして配置されている。また、左レーダ11Lは、車両(自車両P)から前後方向前方に所定距離だけ離れた位置に存在する所定の先行車両Qに対して、左レーダ11Lの検出領域ALの右端と先行車両Qの後部右端QRとが一致するようにして配置されている。
(もっと読む)
パルス圧縮装置、レーダ装置、パルス圧縮方法、およびパルス圧縮プログラム
【課題】SN比を劣化させることなくレンジサイドローブを抑制する信号処理装置を提供する。
【解決手段】フーリエ変換部141は、入力された時間軸上の送信信号を周波数軸上の信号に変換し、送信信号のスペクトルを出力する。フーリエ変換部142は、入力された時間軸上の所望信号を周波数軸上の信号に変換し、所望信号のスペクトルを出力する。所望信号は、自乗され、自己相関スペクトル(パワースペクトル)に変換される。除算器145は、乗算器144の出力する所望信号の自己相関スペクトルを、フーリエ変換部141の出力信号である送信信号スペクトルで除算する。この除算後の信号を参照信号スペクトルとし、逆フーリエ変換部146で時間軸上の信号に変換する。この時間軸上の参照信号をFIRフィルタ147のフィルタ係数とする。
(もっと読む)
先行車検出装置
【課題】2WS基準システムまたは4WS基準システムにおけるオフセット値に対して、さらに自車に適合する差分量を加算することによって、カーブ路における自車線上の先行車を精度よく検出できる先行車検出装置を提供する。
【解決手段】本発明の先行車検出装置は、自車の車両情報に基づいて当該自車が2WS車か4WS車かを判定する車両判定手段と、自車の前方にある物標の横位置情報を取得する横位置情報取得手段と、2WS車または4WS車に応じて横位置情報を自車のカーブ路における車体スリップ角が0度である直線走行方向基準の横位置情報に換算するオフセット値を算出するオフセット値算出手段と、オフセット値に基づいて横位置情報を直線走行方向基準の横位置情報に換算する直線走行方向基準換算手段と、直線走行方向基準の横位置情報に基づいて自車の前方にある物標が自車の前方にある先行車であるか否かを判定する先行車判定手段とを備える。
(もっと読む)
画像レーダ装置
【課題】位相補償精度を向上させて、再生画像の分解能を向上させた画像レーダ装置を得る。
【解決手段】レーダ観測器は、レンジプロフィールの取得処理を、目標との相対位置関係を変えながら繰り返し実行してレンジヒストリを取得する。レーダ画像化器は、レンジ補償器12と、レンジ補償器12によるレンジ補償後のレンジヒストリS1(r,h)上の代表的な複数の反射点の位相変化を調べ、レーダ画像のドップラー周波数方向のぼけの原因となるヒットに対する2次以上の不要位相変化の、最終的にクロスレンジ圧縮に用いるヒット幅の範囲での値を推定する不要位相変化推定器21と、不要位相変化推定器21で得られた不要位相変化φ2(h)に基づき、レンジ補償後のレンジヒストリS1(r,h)から、最終的にクロスレンジ圧縮に用いるヒット幅分だけ切出したレンジヒストリに含まれる不要位相変化成分を補償する位相補償回路22と、を備える。
(もっと読む)
自動車レーダーシステム、自動車レーダーによって出力レーダー波形として送信される掃引パターンを求める方法、及び該方法のコンピュータープログラム製品
【課題】受信された信号内の干渉のタイプを求めるための干渉分類器を備える自動車レーダーシステムを提供する。
【解決手段】1つ又は複数の他のユーザーによって生成されたバースト雑音、周波数チャープ信号、又はそれらの組み合わせを含む雑音信号を受信する受信機102と、複数の異なる周波数掃引信号を生成する信号発生器109,110と、各周波数掃引信号を受信雑音信号と結合して周波数掃引信号毎に結合信号を生成する信号結合器104と、該周波数チャープ信号を含む受信雑音信号に対応する結合信号の雑音レベルを求める干渉分類器203と干渉分類器203によって求められた雑音レベルに従って複数の周波数掃引信号を選択するように動作可能なセレクター206と、出力レーダー波形として送信される、選択された複数の周波数掃引信号を含む掃引パターンを求める制御ユニット206とを備える。
(もっと読む)
先行車検知装置
【課題】継続して存在する先行車が一時的に先行車と認識できなくなった場合に、その車両を先行車として早期に再認識することが可能な先行車検知装置の提供。
【解決手段】ECU5は、物体検知センサ2が今回検出した検出物体が前回よりも以前に検出された既検出の物体と同一であると推定した場合、その既検出の先行車の先行車適合情報を今回検出した物体の先行車適合情報として設定する引継ぎ処理を実行し、引き継がれた先行車適合情報に基づいて先行車の認定を行う。
(もっと読む)
物体検知装置
【課題】物体を迅速かつ精度良く検知する。
【解決手段】物体検知装置10は、自車両の左前部および右前部に配置されて自車両の前方領域全体を1回で走査可能な広角の右レーダ11Rおよび左レーダ11Lと、処理装置12とを備える。処理装置12は、右レーダ11Rにより検出された反射点rRと左レーダ11Lにより検出された反射点rLとが同一の物体上に存在する場合に、反射点rR,rLの左右方向位置差分Δを算出し、この差分Δが所定の閾値Aよりも大きいか否かを判定する左右方向位置判定部23と、反射点rR,rLの左右方向位置差分Δの時間微分絶対値βが所定の閾値Bよりも大きいか否かを判定する時間微分絶対値判定部24と、反射点間距離の変化に基づいて前方領域を横切る物体が存在することを検知する物体検知部25とを備える。
(もっと読む)
広帯域レーダ装置及び広帯域レーダ装置の制御方法
【課題】送信信号の送信条件及び受信信号の受信条件の少なくとも一方を適切に設定すること。
【解決手段】遮蔽物を透過させ目標物に送信信号を送信する送信部20と、前記遮蔽物及び前記目標物のうち少なくとも前記遮蔽物において反射された送信信号を受信信号として受信する受信部30と、前記受信信号に基づき、前記送信部が前記送信信号を送信する条件及び前記受信部が前記受信信号を受信する条件の少なくとも一方を設定する設定部60と、を具備する広帯域レーダ装置。
(もっと読む)
移動無線測位装置
【課題】移動端末の位置を高精度で測位できる移動無線測位装置を安価に実現する。
【解決手段】基準局201の周辺に間隔をおいて複数の中継局202a〜202dを配置し、前記基準局201と複数の中継局202a〜202dとの間を伝送ケーブル101a〜101dを介して接続し、前記基準局201と移動端末203との間で前記複数の中継局202a〜202dを介して双方向通信を行うことによって、前記移動端末203の位置を測位する。
(もっと読む)
電子走査型レーダ装置、受信波方向推定方法及び受信波方向推定プログラム
【課題】検出精度を低減させることなく、高い精度で受信波の到来方向の検出を行う電子走査型レーダ装置、受信波方向推定方法及び受信波方向推定プログラムを提供する。
【解決手段】周波数分解処理部22は、送信波及びターゲットから到来する受信波からビート信号に基づいた複素数データを算出する。ターゲット検知部31は、ビート周波数の強度値からピーク値を検出してターゲットの存在を検知する。ターゲット連結処理部32は、現在及び過去の検知サイクルにおいて検出される前記ターゲットを関連付ける。方位検出部30は、複素数データに基づく生成複素数データを、データ生成手段に対応させて生成し、アンテナ毎に、ターゲットの存在が検知されたビート周波数の複素数データ、及び、生成複素数データを用いてそれぞれ作成された正規方程式に基づいて受信波の到来方向を算出する。
(もっと読む)
261 - 280 / 1,641
[ Back to top ]