
Fターム[5J070AK22]の内容
レーダ方式及びその細部 (42,132) | 目的(効果) (6,033) | 高精度化又は分解能の向上 (1,641)
Fターム[5J070AK22]に分類される特許
81 - 100 / 1,641
移動物体検出装置
【課題】複数の移動体を単一の移動物体であると誤認識してしまう状況の発生を抑制
【解決手段】移動物体検出装置1は、レーダ波を前方に向けて送信し、送信したレーダ波の反射波を観測した結果に基づいて、レーダ波を反射した反射点の位置である反射点位置を連続して検出する。検出された2つの反射点位置のうち、移動物体検出装置1から遠い方の反射点位置である第1反射点位置を移動物体における前端部の位置であるとし、移動物体検出装置1から近い方の反射点位置である第2反射点位置を移動物体における後端部の位置であるとして、第1反射点位置と第2反射点位置との間の距離である反射点間距離の時間経過による変動量が、反射点間距離の変動量が小さいことを示す予め設定された変動判定条件を満たす場合に、第1反射点位置および第2反射点位置がそれぞれ移動物体の前端部および後端部の位置であると判断する。
(もっと読む)
フーリエ変換でのサンプル数を削減した、短時間信号のピークパワースペクトルを検出する方法及び装置

【課題】測定対象とする時間範囲の分解能を高めつつ周波数分解能を高め、しかもフーリエ変換におけるサンプリング周波数を低くしてサンプル数を少なくし、演算量を減らす。
【解決手段】受信信号を変調器5によって周波数変換し、アナログフィルタ7を介して周波数変換後の信号をA/D変換器61によりオーバーサンプリングでデジタル信号に変換し、デジタルBPF62により所望の周波数帯域幅Δfpに相当する成分を抽出し、抽出された信号をダウンサンプリング部63により最低周波数帯域にダウンサンプリングする。その後、信号切り出しゲート11により、ダウンサンプリング部63からのデジタルデータ列を所望の時間幅内で切り出し、周波数分解能を満たすようにゼロ付加部12によってゼロデータを付加し、ゼロデータが付加されたデジタルデータ列に対しFFT処理部13によって高速フーリエ変換を行う。
(もっと読む)
画像レーダ装置
【課題】目標とレーダの間の相対運動が未知である等の場合でも、回転運動によって発生する画像のぼけを精度よく補償することができるとともに、クロスレンジスケーリングを実施できるようにする。
【解決手段】レンジヒストリ取得回路1により取得されたレンジヒストリで、不要な並進運動によって発生するレーダと目標間の不要な距離変化を補償する並進運動補償回路2や、並進運動補償回路2により距離変化が補償されたレンジヒストリで、目標における高周波信号の各反射点で、回転運動によって発生するレンジ方向のぼけを補償する回転レンジセル移動補償回路3などを設ける。
(もっと読む)
追尾装置
【課題】センサと目標との距離が大きい場合には追尾維持性能を発揮し、センサと目標との距離が小さい場合には、各追尾目標に対する追尾精度を向上させる。
【解決手段】センサを介して2つの観測値を取得した場合に、センサ位置を基準点とした2つの観測値のなす角度を算出する角度算出部21と、角度算出部21により算出された2つの観測値のなす角度に基づいて2つの観測値に対する重み係数を算出し、重み係数に基づいて各観測値の各観測値間での重心をそれぞれ算出する角度基準重心算出部22と、角度基準重心算出部22により算出された各観測値の重心および各追尾目標に対する予測値に基づいて、各追尾目標に対する平滑値を算出する平滑処理部24とを備えた。
(もっと読む)
車両用道路形状認識方法及び装置、記録媒体
【課題】より正確な道路形状を頻度良く算出することができる車両用道路形状認識方法及び装置、記録媒体を提供する。
【解決手段】物体の相対速度及び自車速に基づいて移動物体か停止物体という認識種別を判定し、この認識種別の判定結果に基づいて、道路形状を認識するために有効な前記物体単位データを抽出する。そして、自車と先行車との間における自車の走行路上および先行車と先々行車との間における先行車の走行路上のいずれかに停止物体が存在する場合、抽出した物体単位データの中から前記走行路上の停止物体に該当するデータを削除する。この後、左角度方向から右角度方向及び右角度方向から左角度方向の両方向についてそれぞれ、接続条件として距離が単調増加であるデータ同士をグルーピングして路側物群のデータを形成し、その形成された路側物群のデータに基づき道路端を認識する。
(もっと読む)
測角装置
【課題】不等間隔配置を3次元アンテナ配置に適用した場合でも、仰角θの独立なモノパルス測角を実現することのできる測角装置を得る。
【解決手段】鉛直方向の線形アレーアンテナの二つのアンテナ素子グループに対応するようにアンテナ素子2,3を二つの領域に分割する。合成部5,6は、これら二つの領域の受信信号について差信号Δと和信号Σを生成する。除算部7は、差信号Δを和信号Σで除算し、測角部8は、除算部7の演算結果を用いて仰角θのモノパルス測角を行う。
(もっと読む)
画像レーダ信号処理装置
【課題】地上局で精度の高いSAR画像を従来以上の観測データ数で取得する。
【解決手段】地上局からのコマンドを受信するコマンド受信手段11、コマンドに従い、所定領域に信号を放射し、当該信号に対する当該所定領域からの反射信号を受信することで受信信号を取得する目標観測手段12、飛行体の運動データを取得する飛行体観測手段13を有する観測手段1と、コマンドに従い、受信信号および運動データに基づいて、観測手段1が観測を行った通信可能時間帯内で画像再生処理を行い、SAR画像を再生する高速画像処理手段3と、コマンドに従い、受信信号および運動データに基づいて、通信不可時間を利用して高速画像処理手段3より高精度な画像再生処理を行い、SAR画像を再生する小型画像処理手段4と、コマンドに従い、SAR画像を前記地上局に送信する送信処理手段5とを備えた。
(もっと読む)
車両用道路形状認識方法及び装置、記録媒体
【課題】より正確な道路形状を頻度良く算出することができる車両用道路形状認識方法及び装置、記録媒体を提供する。
【解決手段】道路における停止物の中から反射体の物体単位データを抽出し、抽出した反射体の物体単位データに基づいて反射体の列を通る円を近似することにより道路形状推定Rを算出し、この道路形状推定Rを用いて道路形状を認識する。この一連の処理を所定の周期で繰り返し実行する。そして、反射体の物体単位データを抽出する際には、前回周期で抽出した反射体の物体単位データのうち、前回周期で算出した道路形状推定Rを基準とした径方向の所定範囲内に位置するものを今回周期の抽出処理で抽出した反射体の物体単位データに追加する。また、道路形状認識を行う際には、データ追加後の反射体の物体単位データに基づいて道路形状推定Rを算出し、この道路形状推定Rを用いて道路形状を認識する。
(もっと読む)
レーダ装置
【課題】目標の検出性能と測距性能を高めることができるレーダ装置を得ることを目的とする。
【解決手段】距離−ビート周波数マップに対してCFAR処理を実施することで目標候補を検出する目標候補検出処理部13と、目標候補検出処理部13により検出された異なる時刻の目標候補のPRI内の距離とビート周波数から目標相対速度を算出する目標相対速度算出処理部14とを設け、目標相対距離算出処理部15が、目標候補検出処理部13により検出された目標候補のPRI内の距離及びビート周波数と目標相対速度算出処理部14により算出された目標相対速度から目標相対距離を算出する。
(もっと読む)
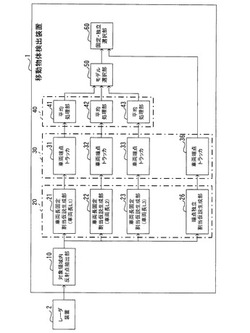
車両用物体検知装置
【課題】自車両の外部に存在する物体の静止および移動の状態を精度良く検知する。
【解決手段】車両用物体検知装置10は、レーダ装置12から発信された電磁波の物体上における反射点の位置を算出する反射点算出部21と、自車両から物体までの距離を算出する距離算出部22と、反射点の位置に基づき物体の水平方向の両方の端点を検出する端点検出部23と、検知対象物の何れか一方の端点が自車両から見て比較対象物に重なっているか否かを判定する重なり判定部24と、重なり判定部24により重なっていると判定され、かつ、時間経過と共に検知対象物までの距離が比較対象物までの距離よりも近くなった場合に、検知対象物の前記比較対象物に重なっていない他方の端点の横移動量に基づいて検知対象物の横移動速度を算出する端点移動速度算出部25とにより、検知対象物の横移動速度の検出精度を向上させる。
(もっと読む)
車両の監視方法及び監視装置
【課題】新規な原理を用いた車両の周辺を監視する装置を実現する。
【解決手段】車両のボディを励振信号で励振する送信装置と車両のボディに近接して電磁波を受信する受信装置とを有する。受信装置は、復調器30と、目標周波数設定レジスタと、目標位相設定レジスタを有する。目標周波数と目標位相とに一致した周波数と位相の基準信号を出力するパルス発振器と、基準信号と送信監視信号との位相差を示す位相差信号を出力する位相比較器32を有する。位相差信号の時間変動から基準信号と送信監視信号の周波数差をもとめ、パルス発振器の目標周波数を制御する周波数制御装置と、位相差信号の示す位相差に基づいてパルス発振器の目標位相を制御する位相制御装置を有する。目標位相を、異なる時刻で検出し、その変動量が所定値以上か否かを判定し、変動量が所定値以上であると判定された場合には、車両の周辺に異常が発生したとして、警報する。
(もっと読む)
物体検出装置
【課題】物体の検出精度を向上させる。
【解決手段】物体検出装置10の物標対象位置推定部25は、レーダ装置11から出力された前回のフレームのデータに対して物標対象生成部23により生成された物標対象の今回のフレームにおける推定位置EPを推定する。距離算出部27は、推定位置EPと今回のフレームにおいて物標対象生成部23により生成された複数の物標対象の各実位置APとの距離を算出する。探索領域設定部28は、距離算出部27により算出された距離が最も短い物標対象を基準物標対象SMとし、基準物標対象SMの実位置APを基準位置SPとした所定範囲を探索領域IAとして設定する。物標統合部29は、今回のフレームの複数の物標対象のうち、探索領域IA内に存在する複数の物標対象を統合して単一の物標対象とし、単一の物標対象を前回のフレームの物標対象と同一であると認識する。
(もっと読む)
物体距離検出装置
【課題】物体に対する距離の検出精度を向上させる。
【解決手段】物体距離検出装置10は、レーダ装置11の発信部11aにより電磁波が発信された時刻から受信部11bにより反射波が受信された時刻までの時間差を検出し、時間差に基づき車両から物体までの距離を算出する距離検出部25と、時間差と反射波の受信強度との対応関係を示す2次元直交座標面上での受信強度分布の波形Fにおける受信強度の増加側および減少側での傾きに応じて、受信強度の極大値(推定ピーク電圧Vpeak)を推定する極大値推定部24と、受信強度分布の波形Fにおける受信強度が電圧閾値Vth以上である時間幅(推定パルス幅W)と、極大値(推定ピーク電圧Vpeak)とに基づいて、距離検出部25により算出された距離を補正する距離補正部26とを備える。
(もっと読む)
パッシブレーダ装置、誘導装置及び電波検出方法
【課題】 目標からのレーダ波の開始周波数を高い精度で検出し、その開始周波数を用いてパルス圧縮を行うことが可能なパッシブレーダ装置、誘導装置及び電波検出方法を提供する。
【解決手段】 パッシブレーダ装置は、受信部、パルス圧縮部、ピーク選択部、フーリエ変換部、パラメータ抽出部及び再パルス圧縮部を具備する。受信部は、電波を受信し、受信信号に変換する。パルス圧縮部は、チャープレート及び開始周波数の概算値に基づいて、受信信号に対してパルス圧縮を行う。ピーク選択部は、パルス圧縮波形に含まれるピークから所定のピークを抽出する。フーリエ変換部は、抽出したピークに対してフーリエ変換を行う。パラメータ抽出部は、フーリエ変換後のパルススペクトルに基づいて開始周波数を検出する。再パルス圧縮部は、検出された開始周波数とチャープレートとに基づいて受信信号に対して再度のパルス圧縮を行う。
(もっと読む)
受信専用フェーズドアレイレーダアンテナの較正方法
【課題】受信専用フェーズドアレイアンテナをその動作環境で較正する方法を提供する。
【解決手段】 受信専用フェーズドアレイアンテナをその動作環境において較正する方法。異なっているが未知の偏波の二つの送信信号を、受信専用アンテナアレイを較正するために使用し、受信エレメント位置と偏波を正確に知る。この方法は、マルチパス信号と標準ノイズの存在下でアンテナエレメントの複合重みと較正信号の垂直方向成分と水平方向成分の大きさを決定する。較正するための二つの異なる方法が提供される。第1の方法は、三つのエレメントの組み合わせを使用し、小さな行列を使用し、次にエレメント毎に全ての可能な結果を平均して較正定数を決定する。第2の方法は、単独値分解を使用して一度に全てのエレメントの較正定数を求めるが、大きな疎行列の操作を必要とする。
(もっと読む)
レーダ装置
【課題】距離アンビギュイティなしに目標の測距値を求めることができるとともに、ドップラアンビギュイティなしに低RCS高速移動目標のラジアル速度を推定することができるレーダ装置を得ることを目的とする。
【解決手段】Σ復調器10により復調されたΣ系受信信号から目標を検出して、その目標の測距値を出力する目標検出器14を設け、目標情報推定器15が、Σ復調器10により復調されたΣ系受信信号とΔ復調器12により復調されたΔ系受信信号から目標の測角値θs及びラジアル速度vsを推定するとともに、そのラジアル速度vsを用いて、目標検出器14から出力された目標の測距値を補正する。
(もっと読む)
自動化されたビームのレイアウト
【課題】 自動化されたビームのレイアウトを改良する。
【解決手段】 自動化されたビームのレイアウトのためのシステムであって、前記システムは以下を備える:
境界ポジション・モジュールであって、
画像フレームの境界に沿って複数の境界ポジションを生成するため、及び
複数のビーム・ロケーションに基づいて前記複数の境界ポジションを改変するため
に設計された該モジュール;並びに
ビーム・ロケーション・モジュールであって、前記複数のビーム・ロケーションはそれぞれ前記画像フレームの前記境界内にあり、前記複数の境界ポジションと、並びにマッピング優先度、ビーム・プラットフォームの動く方向、及び前記ビーム・プラットフォームの動く速さのうちの少なくとも1つとに基づいて、前記複数のビーム・ロケーションを決定するために設計された該モジュール。
(もっと読む)
物標検出装置、物標検出方法およびプログラム
【課題】歩行者の位置を正確に検出することができる物標検出装置、物標検出方法およびプログラムを提供する。
【解決手段】車両の前方に向かって電波を送信する送信部11と、反射電波を受信する受信部12と、物標が歩行者であるか車両であるかを判定する情報処理を行うとともに、車両に対する物標の位置を演算して求める情報処理を行う情報処理部21と、情報処理部21における情報処理の内容が予め記憶された記憶部22と、が設けられている。記憶部22には、物標が歩行者である場合に行われる歩行者用情報処理の内容、及び、物標が車両である場合に行われる車両用情報処理の内容が予め記憶されている。情報処理部21は、物標が歩行者であると判定された場合には、記憶部22から取得した歩行者用情報処理の内容に基づいて情報処理を行い、物標が車両であると判定された場合には、記憶部22から取得した車両用情報処理の内容に基づいて情報処理を行う。
(もっと読む)
指示支援装置
【課題】本発明は、目標から到来した反射波で示される画像の分解能の向上を図る高分解能処理の対象を設定する指示支援装置に関し、構成が大幅に複雑化することなく高分解能処理の処理量を削減できることを目的とする。
【解決手段】到来した反射波で示される画像の内、前記画像に含まれる見かけ上の目標が位置する領域もしくは部位を抽出する抽出手段と、前記領域または前記部位を分解能の向上を図る高分解能処理の対象とする制御手段とを備える。
(もっと読む)
レーダ装置
【課題】レーダ装置において、ターゲットからの反射波に含まれるドップラスペクトルの広がりに拘わらず、簡易な構成を用いてコヒーレント積分利得あるいはノンコヒーレント利得を高める。
【解決手段】レーダ送信部は、送信信号を高周波送信信号に変換して送信アンテナから送信する。レーダ受信部は、複数の受信アンテナを用いて、ターゲットにより反射された反射波の到来方向を推定する。レーダ受信部は、受信信号と送信信号との相関値を基に、複数のドップラ周波数に応じた位相変動の補正量を用いてコヒーレント積分する複数のアンテナ系統処理部と、複数のコヒーレント積分の各出力を基に、各受信アンテナの配置に起因する位相差情報である相関行列を、ドップラ周波数毎に生成する複数の相関行列生成部と、複数の相関行列生成部の出力を加算する加算部と、加算部の出力を基に、反射波の到来方向を推定する到来方向推定部と、を有する。
(もっと読む)
81 - 100 / 1,641
[ Back to top ]