
Fターム[5J083AA05]の内容
音波、超音波を用いた位置、速度等の測定 (14,323) | 方式 (1,325) | パッシブ (240)
Fターム[5J083AA05]の下位に属するFターム
アコースティックエミッション
Fターム[5J083AA05]に分類される特許
41 - 60 / 240
音源方向推定装置
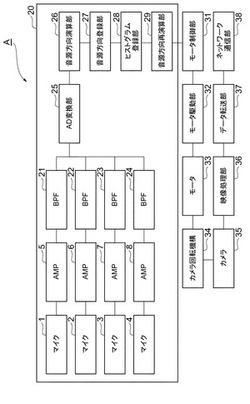
【課題】瞬間的なノイズに対する誤検出を低減し、かつ、演算量を低減することが可能な音源方向推定装置を提供すること。
【解決手段】音源方向推定装置20では、音源で生じた音を入力し音を電気信号に変換する複数のマイクロフォン1〜4と、複数のマイクロフォン1〜4によって変換された電気信号に基づいて、音源の方向を時間的に連続して推定して、時系列の音源方向角度を出力する音源方向演算部26と、最新の所定数の時系列の音源方向角度を基に、複数の角度範囲毎の音源方向の推定の頻度を示すヒストグラムを算出するヒストグラム登録部28と、ヒストグラムにおいて頻度が最大の角度範囲を基にして、音源の方向を決定する音源方向再演算部29と、を備える。
(もっと読む)
音源定位装置及びコンピュータプログラム

【課題】MUSIC法を使用して安定的に音源定位を行なえる音源定位装置を提供する。
【解決手段】音源定位装置50は、マイクロホンアレイ52の出力から得られる複数チャンネルの音源信号の各々と、マイクロホンアレイ52に含まれる各マイクロホンの間の位置関係とに基づいて、3次元空間内で定義された複数の方位の各々について、MUSICアルゴリズムにより、所定時間ごとにMUSICパワーを算出するMUSIC処理部62と、複数の方位の各々について、MUSIC処理部62により時系列として得られたMUSICパワーの値の強度及びその変化量に基づいて、音源の発生から消滅までの音源の方位の変化を検出する音源推定部64とを含む。
(もっと読む)
音響波イメージング装置または音響波イメージング方法
【課題】音響波イメージング装置において、CMP法による計算を高速処理するための技術を提供する。
【解決手段】複数の音響波受信素子による受信信号の位相を揃える整相部と、位相が揃えられた受信信号を複素信号化する複素信号化部と、複素信号の相関行列を計算する相関行列計算部と、相関行列と予め定められた拘束ベクトルとを用いて受信信号の拘束付最小電力を計算する電力計算部とを有し、相関行列計算部は、所定の周期で前記相関行列を計算して電力計算部に順次出力するものであり、電力計算部は、入力された相関行列のそれぞれを用いた拘束付最小電力計算を並行的に行うものである音響波イメージング装置を用いる。
(もっと読む)
音源位置特定装置および音源位置特定方法
【課題】同種の音源(周波数域が同じ音源)が複数存在する場合であっても、個別にその位置を特定することが可能な音源位置特定装置および音源位置算出方法を提供することを目的とする。
【解決手段】空間内の異なる位置にそれぞれ設置され、空間内の複数の音源からの音が混合した混合信号を同時に取得する複数のマイク110と、複数の混合信号から独立成分分析を用いて、個々の音源からの音を示す単一音源信号を求める信号分離部114と、単一音源信号をもとに、個々の音源から個々のマイクが取得したと推定される音を示す個別信号を算出する個別信号算出部118と、音源ごとに個々のマイクの個別信号同士を比較して、マイクごとの個別信号の強度の比率を取得する比率取得部120と、比率と複数のマイクの設置位置とから、個々の音源の位置を算出する音源位置算出部122とを備えることを特徴とする。
(もっと読む)
反射音情報推定装置、反射音情報推定方法、プログラム
【課題】収音信号から反射音情報を推定する技術を提供する。
【解決手段】音声信号をM個のマイクロホンで収音して得られるM個の収音信号がそれぞれ周波数領域に変換された信号(観測信号)を用い、空間中の任意の位置と各マイクロホンとの間の周波数ごとの伝達特性を模擬した関数(伝達特性関数)に複素振幅を乗じたものを観測信号から減じて得られる残差信号のパワーが最小になるように伝達特性関数に対応する空間中の位置により決定される方向および複素振幅を推定し、推定された方向を反射音の到来方向とし、推定された複素振幅を反射音の到来振幅とする。
(もっと読む)
波動源位置演算方法及び波動源位置演算装置
【課題】外乱による影響を取り除き、波動源位置の演算精度を高めることができる波動源位置演算方法を提供する。
【解決手段】観測点において、波動源が放射する波動信号を検出し、当該波動源の位置を演算する波動源位置演算方法であって、波動信号を時間周波数の離散信号に変換する工程と、離散信号を用い、波動信号の振幅成分、波動信号の振幅の微分成分、または、波動信号の空間的な勾配の少なくとも一つのパラメータを含む式により、時間周波数毎に、波動源の位置を表す位置推定値を演算する位置推定値演算工程と、当該式を用いて表される評価関数に位置推定値を代入して、評価関数の値に応じて、時間周波数の帯域を制限するマスキング関数を設定するマスキング関数設定工程と、マスキング関数により時間周波数の帯域に制限をかけるマスキング工程と、位置推定値から波動源の位置を演算する波動源位置演算工程とを含む。
(もっと読む)
音源モニタリング装置
【課題】本発明は、音源をモニタリングする音源モニタリング装置に関し、音源を容易に特定する。
【解決手段】人の目先に置かれ透視した視界に重なる画像を表示するグラスモニタと、
グラスモニタに対する固定位置に置かれグラスモニタを透視して得られる視界内から発せられた音を捉えて音信号を生成する音センサと、
上記の音信号に基づいて視界内の音源を同定する音源同定部と、
グラスモニタ上の、そのグラスモニタを透視して得られる視界上の音源に重なる位置に、音源を表わす画像を表示する音源表示部とを備えた。
(もっと読む)
音響インテンシティプローブ
【課題】安価なマイクロホンを使用しても実用上の音源の同定が可能となり、しかも安価であって構成も簡易である音響インテンシティプローブの提供。
【解決手段】この発明は、マイクロホン1、4、5は、直径aからなる円周30上に等間隔にそれぞれ配置される。このマイクロホン1、4、5と対をなるマイクロホン2、3、6は、直径aからなり円周30と間隔bをおいて平行に配置される円周40上であって、平面で見た場合にマイクロホン1、4、5の中間の位置にそれぞれ配置される。マイクロホン1〜6のそれぞれは、円周30の円周40と対向しない側から支持され、その支持の方向は円周30と交差する方向である。
(もっと読む)
音源位置特定方法
【課題】 ネットワーク配線に加えて、マイクロホン接続のための追加配線を不要する、音源位置特定方法を提供する。また複数個あるマイクロホンで2種類以上のクロックを用いても音源位置特定を可能にした、音源位置特定方法を提供する。
【解決手段】 監視カメラ1、11は、マイクロホン2、3、12、13を有し、マイクロホン2、3、12、13により受音したオーディオ信号を元に音源方向情報を求め、サーバー20は、監視カメラ1、11で求められた音源方向情報に基づき、音源位置情報を特定する。
(もっと読む)
整相システム、整相装置及び整相プログラム
【課題】変形したえい航型ラインアレイの形状を推定することができ、推定したえい航型ラインアレイの形状から指向性を補償した整相処理を行なうことができるようにする。
【解決手段】本発明の整相システムは、複数の受波器及びセンサを備えるラインアレイと、整相装置とを備え、整相装置が、センサからのセンサ情報及びえい航体の方位情報に基づいて、ラインアレイ上の複数の疑似的な位置から出力されたとみなす複数の疑似センサ出力情報を生成する疑似出力生成手段と、複数の疑似センサ出力情報及び複数の疑似的な位置に基づきラインアレイの形状を推定し、この推定したラインアレイ上での複数の受波器の位置を求めるラインアレイ形状推定手段と、複数の受波器からの受波信号に対して、ラインアレイ形状推定手段により求められた対応する受波器の位置で音波を受波したときの遅延時間を付与して受波信号の位相を整相する整相処理手段とを有する。
(もっと読む)
音源位置推定装置
【課題】到来時間差観測値に誤差がある場合にも、音源位置の推定誤差を小さくする。
【解決手段】到来ふ仰角が上向きのマルチパス波と到来ふ仰角が下向きのマルチパス波について別個に到来時間差のテーブル値を記憶しておき(209M)、受信したマルチパス波の各々について到来ふ仰角が上向きか下向きかの判定を行い、観測された到来時間差とテーブル値との不一致度を上向きのふ仰角を有するマルチパス波と下向きのふ仰角を有するマルチパス波の各々について別個に算出して、その和をコスト関数として(210)、音源位置の推定を行う(211)。
(もっと読む)
パーティクルフィルタリングによる移動ロボットからの2次元音源地図作成方法
【課題】移動ロボット本体だけで断続的に取得したセンサデータをもとに方位単独SLAMを行うことができる2次元音源地図作成方法を提供する。
【解決手段】移動ロボットに搭載された遅延和ビームフォーミング法により最適化されたマイクアレイにより音源からの音声データを断続的に取得し、取得した音声データに対し、周波数帯域選択法を利用したパーティクルフィルタリングにより、方位単独SLAM(Bearing only Simultaneous Localization and Mapping)を行い、2次元音源地図を作成することを特徴とする。
(もっと読む)
海底ケーブル移動距離測定システム、装置及び方法
【課題】海底ケーブルの敷設後の位置を測定し、海底ケーブルの移動距離を算出する海底ケーブル移動距離測定システム、装置及び方法を提供すること。
【解決手段】海底ケーブル移動距離測定システム1は、海底ケーブル位置DB32と、超音波発生装置160と、超音波伝達部161と、移動装置111と、移動装置111において左側超音波受信機121Lと、右側超音波受信機121Rとを備える。そして、海底ケーブル移動距離測定システム1において、海底ケーブル移動距離測定装置10は、左側超音波受信機121Lによって受信された超音波の音圧と、右側超音波受信機121Rによって受信された超音波の音圧とが等しくなるように移動装置111を制御し、制御されて移動した移動装置111の位置情報を、GPS衛星141との通信に基づいて取得し、取得した位置情報と、海底ケーブル位置DB32に記憶された位置情報との差を算出する。
(もっと読む)
目標運動解析方法及び目標運動解析装置
【課題】目標運動解析の解の収束を早め、解の精度を向上させること。
【解決手段】本発明の目標運動解析方法は、センサにて前記目標を探知する探知ステップと、前記センサにて探知された前記目標の探知方位及び探知周波数、該探知された探知時刻、及び、該探知時刻における前記センサの位置情報を含む目標探知情報を生成する生成ステップと、前記センサにて信号を受信可能な探知領域を計算する計算ステップと、前記センサの目標探知情報及び探知領域を使用し、前記センサの探知領域と前記目標の探知方位とが重なる領域を前記目標の存在圏と限定した上で、前記目標の位置を推定する第1の推定ステップと、を有する。
(もっと読む)
音の到来方向判定システム及びプログラム
【課題】正しく推定された音の到来方向と正しく推定できなかった音の到来方向とを識別可能に表示する。
【解決手段】音の到来方向判定システム100は、測定ユニット10の各マイクロフォンへの音の到達時間差から、パーソナルコンピュータ20の演算処理部23の音源位置推定部24により音の到来方向を推定する。虚音源位置判定部25は、推定された音の到来方向の信憑性を判定する。表示処理部26は、信憑性が低いと判定された音源位置と信憑性が高いと判定された音源位置をディスプレイ29上に識別可能に同時に表示する。
(もっと読む)
音源探査装置
【課題】背景雑音の影響を受け難く、複雑な信号処理を行うことなく高精度に音源定位を行うことが可能な音源探査装置を提供する。
【解決手段】音源探査装置1は、両指向性を有する複数の差動マイクロホン10と、同一平面内に複数の差動マイクロホン10がアレイ配列されるように、複数の差動マイクロホン10を支持する支持部材20と、を備える。複数の差動マイクロホン10は、指向性の主軸が前記同一平面に対して略垂直となるように支持部材20に支持されている。
(もっと読む)
音響信号処理装置
【課題】2個の検出器で形成されるダイポール指向特性を信号処理により変形させることで信号音方向と反対側の方向からの妨害雑音を低減させ、真の信号音を精度良く抽出する音響信号処理装置を提供する。
【解決手段】音響信号処理装置10は、検出器1X,1Yによって受信された2つの音響信号のクロススペクトル処理をクロススペクトル演算器2で行い、クロススペクトル演算器2によって得られた位相情報の虚数部を虚数部抽出部3により抽出する。加算器8は抽出された虚数部に位相遅延器6の位相遅延θを加算して重み付け器14により重み付けを行い、位相遅延された虚数部は乗算処理器4にてクロススペクトル演算器2から出力された振幅情報に次々に乗算処理され、演算された出力が出力器5から出力される。
(もっと読む)
受信波の波源位置推定装置及び波源方向推定装置、並びに受信波の波源位置推定方法及び波源方向推定方法
【課題】近傍波源の受信波の場合に、計算負荷を低減しつつ、推定精度の劣化が抑制された波源位置推定装置を提供する。
【解決手段】波源位置推定装置は、アレーアンテナ24aにより電波又は音波を受信して受信波の波源の位置を推定する。波源位置推定装置は、各受信素子が受信した受信波の入力ベクトルを算出し、代数的手法を用いた波源の位置算出の際に近傍波源の位置特定を可能とする変換行列を算出し、前記入力ベクトルと前記変換行列とを基に代数的手法によって波源の位置を算出する。
(もっと読む)
音源方向推定装置及びプログラム
【課題】 ハードウェア規模が小さく、かつ推定精度が高い音源方向推定装置を提供する。
【解決手段】 音を採取する複数のマイクを備える。また、ある位置に音源があった場合に、各マイク位置にその音源からの音が伝達する際の空間伝達関数の逆特性を、異なる複数の位置について予め保持しておく。そして、各マイクが採取した音信号に対し、そのマイクについて保持されている、複数の位置の空間伝達関数の逆特性を適用して、採取した音信号の音源位置(未知である)の音信号を推定する。そして、異なるマイクについて、推定された音源位置での音信号が一致する(音信号の相関が高い)ものを探索し、未知音源の少なくとも方向の情報を得る。
(もっと読む)
砲撃体位置明確化のためのシステムおよび方法
【課題】超音速飛翔体の砲撃体を位置決めするための方法を提供する。
【解決手段】砲口爆風信号を抽出するために、時間ウィンドウを規定し、ウィンドウにおける全エネルギーよりも所定の比率だけ大きい、ウィンドウにおけるピーク信号を砲口爆風信号として認識する工程を含む砲撃体位置決め方法とする。
(もっと読む)
41 - 60 / 240
[ Back to top ]