
Fターム[5J083AC18]の内容
音波、超音波を用いた位置、速度等の測定 (14,323) | 目的 (2,021) | ノイズ低減(S/N比向上) (142)
Fターム[5J083AC18]に分類される特許
61 - 80 / 142
ドップラーソーダーシステム
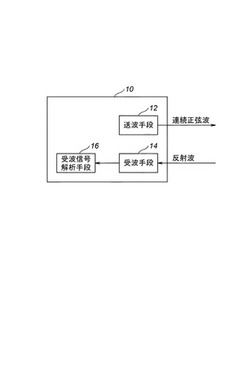
【課題】実用上十分な計測精度を備えたドップラーソーダーシステムを提供する。
【解決手段】音波を大気中に放射し、大気中に存在する密度の揺らぎの領域から反射された反射波を受信してこの反射波に含まれる周波数成分のドップラーシフト量から所望の高度の風速を検出するドップラーソーダーにおいて、音波を大気中に放射する送波器と、上記送波器により該大気中に放射された音波の反射波を受信する受波器とを有し、上記送波器は、音波として連続正弦波を大気中に放射するようにした。
(もっと読む)
目的物及び動作検出
例えば、人間の手のモーション、位置、若しくは構成は、夫々の時間フレームで複数の送信信号を送信するステップ、複数の受信信号を受信するステップ、送信信号及び受信信号を利用して複数のチャネルインパルス応答を判別するステップ、近接する時間フレームに対するインパルス応答を相互に近接させて、インパルス応答のマトリクスを規定するステップ、及び、モーション、位置、若しくは構成に対応するパターン(22)に対する上記マトリクスを分析するステップによって、認識され得る。  (もっと読む)
(もっと読む)
超音波トランスジューサの感度を高めるための装置及び方法

【課題】トランスジューサ素子に関連する電気インピーダンスを低減し、感度を向上させる。
【解決手段】音響スタック150の有ポール圧電材料層154は上部側及び底部側166、170を有し、第1の音響インピーダンスを有する有ポール圧電材料から形成される。有ポール圧電材料層154は第1の厚さ190を有し、また音響スタック150はこの第1の厚さ190に基づいた出力電気インピーダンスを有する。インピーダンス整合層164、168は第1の音響インピーダンスと同様の音響インピーダンスを有する材料から形成され、第2または第3の厚さ192、194を有し、有ポール圧電材料層154の上部側及び底部側166、170に取り付けられる。有ポール圧電層154とインピーダンス整合層166、168は1つの音響共振厚152を形成している。トランスジューサ106の中心周波数は音響共振厚152に基づく。
(もっと読む)
水中探知装置
【課題】TVG(Time Variable Gain)の機能を維持しつつ、ノイズレベルが増加した場合でも、画面上にノイズ映像が表示されないようにする。
【解決手段】ノイズレベルが上昇した場合に、TVGの利得が飽和状態となるTVGリミットをL1からL2へ自動的に変更する。TVGリミットをノイズレベルに応じて距離の短くなる側にシフトさせることで、利得の飽和する時点が近距離側にシフトし、利得が一定値となる領域が拡大する。これにより、ノイズレベルが表示レベルを超えないようにすることができ、ノイズが効果的に抑制される。
(もっと読む)
水底下物体の探査類別方法及び装置
【課題】 水底下の物体の探査に加えて、その材質等による類別を行えるようにする。
【解決手段】 水中航走体1に、所要の帯域幅に亘り周波数を変化させた低周波を送波できる低周波音源2と、探査対象物体7による低周波の散乱波9を受波する受波器3と、受波器3で受波された散乱波9を解析する信号処理器5と、航法装置6を搭載して、水底下物体の探査類別装置を形成する。信号処理器5にて、受波器3で受波された低周波の周波数パターンを、予め形状、大きさ、材質、板厚等が既知の物体で得られる散乱波の周波数パターンを蓄積したデータベースと照合することで、水底下に埋もれた人工物である探査対象物体の検出と、その形状、大きさ等の類別を行う。
(もっと読む)
物体方位検出装置及び物体方位検出システム
【課題】受信素子の間隔の広狭に拘らず、物体の方位を精度良く検出する。
【解決手段】物体位置検出装置1は、受信マイク6aが受信した反射波に対してパルス圧縮部10aが検出した複素相関値と、他の受信マイク6bが受信した反射波に対してパルス圧縮部10bが検出した複素相関値との位相差を位相差算出部13により算出し、その算出した位相差、受信マイク6a,6bとの間隔及び送信波の波長に基づいて物体の方位を方位算出部14により算出する。相関検出演算が線形演算であるために演算前後で受信信号間の位相差が保持されるため、S/Nを向上させながらも位相差を用いた方位検出が可能となり、受信マイク6aと受信マイク6bとの間隔の広狭に拘らず、物体の方位を精度良く検出することができる。
(もっと読む)
超音波センサ
【課題】 センサ素子を配置する位置精度が高く、超音波の振動の減衰が小さい超音波センサを実現する。
【解決手段】 超音波センサ10において、圧電素子11p〜11sを配置する間隔と等しい厚さに形成され、隣接する各圧電素子11p〜11sを接着固定する接着部材61により、配置間隔が正確に保たれた状態で各圧電素子11p〜11sが接着固定されているので、各センサ素子13p〜13sを所定の位置に正確に配置することができる。また、接着部材61は圧電素子11p〜11sより弾性率の低い材料により構成されているため、接着部材61が圧電素子11p〜11sの振動を大きく拘束しないとともに、各圧電素子11p〜11s間で振動が伝達されにくいので、センサ素子13p〜13sごとに超音波を分離して伝達することができる。
(もっと読む)
広帯域送波器
【課題】 水中で使用される音響波の送波器において、特に低周波域で従来よりも大幅に広帯域化が可能な広帯域送波器を提供すること。
【解決手段】 金属ディスク2と、金属ディスク2の外側面に接着された金属ディスク2とほぼ同じ直径を有するアクティブ円板体1とから構成される円板状振動体6を2個有し、金属ディスク2は、内側面に半径方向に形成された複数の溝5と、溝5の中にそれぞれ設置されたボールベアリング3とを有し、2個の円板状振動体6は、金属ディスク2の内側面を対向させて配置され両端部にボールベアリング3を保持して形成された複数の金属シャフト4により結合され、ボールベアリング3と金属シャフト4の両端部が溝5の中を半径方向へ移動可能に構成されている。
(もっと読む)
ショートリング付トランス
【課題】回路基板上の素子配置の変更を伴うことなく、回路基板上における接続状態を容易に検査可能なショートリング付トランスを提供する。
【解決手段】SR付トランス5では、ショートリング7の対象断面の輪郭が、正方形の四隅が円の一部をなす円弧に削られた形状に形成され、接続端子6が、ケーシング43及びベース44の配列方向からベース44の固定面(ケーシング43を固定する面)側を見下ろした際にショートリング7の対象断面の輪郭が削られた部分にかかり、少なくとも一部が露出する部位の側端面(固定面に直交する面)に配置されている。したがって、SR付トランス5によれば、接続端子6のハンダ付け状態が回路基板に対して真上方向から視認可能となるため、回路基板上の素子配置の変更を伴うことなく、回路基板上におけるSR付トランス5の接続状態を容易に検査することができる。
(もっと読む)
デジタルレーダーまたはソナー装置
レーダーまたはソナーシステムは、レーダーシステムのアンテナまたはソナーシステムのトランスデューサが受信した信号を増幅し、次いで線形受信機による線形復調に晒す。増幅器と線形受信機との間には、アンチエイリアスフィルタおよびアナログ−デジタルコンバータが存在してもよい。このシステムはさらに、プロセッサにおいて実行されるネットワークスタックを有するデジタル信号プロセッサを有してもよい。当該プロセッサはさらに、システムが異なるレンジにて動作する場合、ネットワークインターフェイス・メディアアクセスコントローラを有してもよく、モジュレータは、パルス持続時間およびインターパルス間隔が異なる2つのパルスパターンのパルスを作り出してもよい。これらのパルスパターンは、2つのレーダー画像を形成するよう導入されるとともに用いられる。これら2つの画像は、より大きいインターパルス間隔よりも20倍未満の持続時間またはレーダーシステムの場合はアンテナ分解能時間の1/2未満の時間において取得されたデータから導き出される。1つ以上のルックアップテーブルが増幅器を制御するよう用いられてもよい。レーダーシステムは、レーダービデオのレベルを8つより多く含むデジタル出力を生成してもよい。 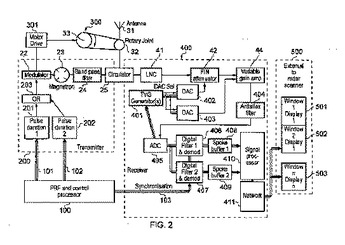 (もっと読む)
(もっと読む)
音源方向推定装置およびこれを用いた音源分離装置、ならびに音源方向推定方法およびこれを用いた音源分離方法
【課題】 反射音等の残響の影響を受けることなく、希望の音源の方向を特定する。
【解決手段】 左右のディジタル音響信号l(n)およびr(n)が、音源方向推定部26に入力される。音源方向推定部26は、これらのディジタル音響信号l(n)およびr(n)に対して両耳聴モデルに従う処理を施すことによって、音源の方向を推定する。併せて、各ディジタル音響信号l(n)およびr(n)の入力パワーPdが、パワー検出部24によって検出され、この入力パワーPdの立ち上がりが、立ち上がり検出部34によって検出される。そして、入力パワーPdの立ち上がりが検出されると、音源方向特定手段30が、その時点での音源方向推定部26による推定方向[φe,ψe]を、真の音源方向[φs,ψs]として特定する。つまり、各マイクロホン12および14に最初に到達した音の方向が、音源方向[φs,ψs]として特定される。
(もっと読む)
超音波センサ
【課題】 音響整合層を備え、超音波の検出感度の高い超音波センサを実現する。
【解決手段】 超音波センサ10を、バンパ20のように音響整合部材12と音響的性質が近似した部材に取り付けた場合でも、超音波センサ10が、取付部20aと音響整合部材12との間に介在され、バンパ20から音響整合部材12への振動の伝達を減衰させる振動減衰部材13を備えているので、超音波がバンパ20から音響整合部材12に伝達されてノイズの原因となることを防止することができる。これにより、超音波のノイズを低減することができるので、超音波の検出感度を向上させることができ、超音波の検出感度の高い超音波センサ10を実現することができる。
(もっと読む)
超音波センサ及び超音波センサの製造方法
【課題】 音響整合部材に圧電素子を装着した超音波センサであって、超音波検出素子の位置精度が高く、超音波の検出感度の高い超音波センサ及び超音波センサの製造方法を実現する。
【解決手段】 超音波センサ10において、音響整合部材12及び圧電素子11は、受信面12aにおいて受信した超音波の伝達方向に沿って形成された溝状の空隙部16により、超音波を分離して伝達し、検出可能な複数の超音波検出素子13p〜13sに区画されているため、良好なクロストーク特性を得ることができ、超音波の検出感度を向上させることができる。また、超音波検出素子13p〜13sは、空隙部16の延長線上に形成される接続部17により互いに接続されているため、所定の位置に配置されて一体的に形成されるので、超音波検出素子13p〜13sの位置精度を高くすることができる。
(もっと読む)
探知装置
【課題】超音波エコーの信号強度が白色ノイズの信号強度と同等又は小さい場合であっても、白色ノイズと水中物を区別して表示することができる探知装置を提供することを目的とする。
【解決手段】以上説明したように、この実施態様に係る探知装置10は、超音波パルスを水中に発射し、水中物によって反射された超音波エコーを第1フィルタ21を通じて、包絡線検波する第1検波部31と、前記超音波エコーを第1フィルタ21よりも帯域幅が狭い第2フィルタ22を通じて、包絡線検波する第2検波部32とを備え、第1検波部31からの出力信号の信号強度と、第2検波部32からの出力信号の信号強度の比として信頼度Rを計算し、前記信頼度Rに基づいて、表示部44に表示される超音波エコーの表示色の濃淡を変化させる。
(もっと読む)
移動体検知装置及び移動体検知方法
【課題】検知エリアの明るさに左右されることなく、検知エリア内を移動する移動体の移動を自動検知し得る移動体検知装置を提供する。
【解決手段】本発明の移動体検知装置1は、検知エリア7に超音波信号を送信する送波器2と、検知エリア7内で反射した超音波信号を受信する受波器3と、送波器2から送信される超音波信号に対応して受波器3で取得される反射波データから移動体6の三次元位置を演算する位置演算手段4と、位置演算手段4によって、ある瞬間に取得される反射波データから演算される移動体6の三次元位置を基準位置とすると共に、直後に取得される反射波データから演算される移動体6の三次元位置を対象位置として、基準位置から対象位置までの移動ベクトルを演算し、移動ベクトルの大きさが所定値以下となる場合に、基準位置から対象位置に移動体6が移動したと判断する移動判断手段5とを備える。
(もっと読む)
半導体集積回路装置
【課題】 超音波診断システム等に用いられる送信回路を、小面積で振動子駆動回路部高圧電源の高電位側及び低電位側とも0〜±200V程度まで可変とし、もって複数チャネルの送信回路を集積化した半導体集積回路装置を実現する。
【解決手段】 ゲート駆動回路部10において入力電圧パルスを電流パルスに変換し、振動子駆動回路部20に印加される高電位側電圧+HV及び低電位側電圧-HVを基準として、再び電流パルスを電圧パルスに変換することによって入力電圧パルスの電圧レベルシフトを実現すると共に、そのシフトされた電圧パルスを入力とするゲート駆動回路部10の出力バッファの電圧パルス振幅を、同じく振動子駆動回路部20に印加される高電位側電圧+HV及び低電位側電圧-HVを基準としてゲート駆動回路部10にて生成する構成とする。ゲート駆動回路部10と出力負荷駆動回路部20とは直流的に結合される。
(もっと読む)
スキャニングソナー
【課題】残響を抑圧するにあたって、周波数特性の違いを利用せず、演算時間を短縮して高速処理を可能とする。
【解決手段】各レンジごとに、受信ビームで受信された信号のレベルを検出し、検出された信号レベルに対して、一定以上突出したレベルを除いた範囲で、当該信号レベルの平均値Bを算出する。この平均値Bに基づいて、レベル変換される信号レベルの上限値となる変換最大レベルL2を決定し、検出された信号レベルIのうち、変換最大レベルL2以下の信号レベルをこれよりも低い信号レベルに変換する。
(もっと読む)
移動物体検出装置
【課題】移動物体の誤検出を防止する。
【解決手段】判定回路86では、発振回路1から第1周波数f1の送波信号を送波器3に出力させて移動物体を検知したとき、第1周波数f1と異なる第2周波数f2の送波信号を発振回路1から送波器3に出力させる。そして、第2周波数f2の送波信号についても移動物体を検知したとき、言い換えるとすべての周波数(第1周波数f1並びに第2周波数f2)の送波信号について移動物体を検知したときにのみ判定回路86から検出信号を出力する。その結果、例えば、監視空間の外から大きなエネルギ波(音圧レベルが非常に高い音波)が到来したときでも移動物体の誤検出が防止できる。
(もっと読む)
音響波および電磁波を使用して遠隔デバイスを標定するための方法
遠隔デバイスによって占有される空間領域をその波面が伝搬し、最終的に遠隔デバイスに到達するパルスを音響送信器から放出するステップと、オンボード マイクロフォンにより前記波面が検知された瞬間に、各遠隔デバイスから無線周波数パルスが放出されるステップと、遠隔デバイスから伝搬する無線周波数信号を無線基地によって取得し、それによりi番目の音響源とj番目の遠隔デバイスとの間の距離に比例する到達時間遅延の計算を可能にするステップと、遠隔デバイスの個数に等しい最大長Mを有し、かつ受信時間と推定音速の積として得られる一連の距離で構成される受信ベクトルを、i番目の源による各放出に対し形成するステップとによる遠隔デバイスの標定。N+1個の受信ベクトルを形成するために、上記ステップを全ての音響源に対して繰り返し、そこから導出された行列式を解くことによってデバイスの位置を算出する。 (もっと読む)
エコー画像の表示装置
【課題】ノイズ画像を抑制しつつ標的のエコー画像を鮮明に表示する。
【解決手段】水中の深度方向の所定範囲を分割して得られる複数のレイヤーのそれぞれについて、探知領域内の各地点におけるエコーを経時的に測定し、レイヤーごとに各地点のエコーレベルの平均値を算出する。次に、算出された各レイヤーにおける各地点のエコーレベルの平均値のうち、最大値を求める。そして、算出された最大値に基づいて、当該地点におけるエコー画像を表示する。例えば、地点Z1においては、魚群G1は全てのレイヤー1〜3にまたがって存在するが、エコーレベルの平均値が最も大きくなるのは、全ての深度に魚群G1が存在するレイヤー2であるから、レイヤー2のエコーレベル平均値に基づいて、地点Z1におけるエコー画像を表示する。
(もっと読む)
61 - 80 / 142
[ Back to top ]