
Fターム[5J083BE38]の内容
音波、超音波を用いた位置、速度等の測定 (14,323) | 受信信号処理 (1,335) | 包絡線検波を行うもの (85)
Fターム[5J083BE38]に分類される特許
1 - 20 / 85
車両用障害物検知装置
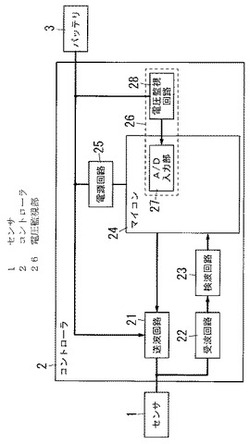
【課題】電源からセンサに供給される電圧が変動する場合であっても、障害物を検知する距離を比較的大きくとることを可能にする。
【解決手段】車両用障害物検知装置は、超音波を送受波するセンサ1と、センサ1に超音波を送波させるとともに、センサ1が受波した反射波の振幅と閾値とを比較することにより障害物の有無を判断するコントローラ2とを備える。コントローラ2は、電源電圧を検出する電圧監視部26を備え、電圧監視部26が検出した電源電圧が低いほど閾値を小さく設定する。
(もっと読む)
車両用障害物検知装置

【課題】地面による反射波の影響を受けにくい車両用障害物検知装置を提供する。
【解決手段】車両用障害物検知装置は、超音波を送受波するセンサ1と、センサ1に超音波を送波させるとともに、センサ1が受波した反射波の振幅と閾値とを比較することにより障害物の有無を判断するコントローラ2とを備える。コントローラ2は、センサ1による送波からの時間を計時するタイマ26と、タイマ26が計時する時間に応じて閾値を設定する閾値設定部27とを備える。閾値設定部27は、地面9からの反射波を考慮しない場合の閾値に、検知期間を開始する時刻における地面9からの反射波の影響を除去するための補正値を加えた閾値を設定し、障害物の有無を判断する検知期間内においてタイマ26の計時する時間が経過するにつれて段階的に閾値を小さく設定する。
(もっと読む)
水中映像取得装置
【課題】 超音波を用いた水中映像取得装置において、自立型無人潜水器に搭載するためには装置の小型化が必須である。また、運用時間延長のために低消費電力化、移動物体観察のために高フレームレート化、小型反射体観察のための高分解能化が、実用化への障壁となる。
【解決手段】 球状の音響レンズ、あるいは球状の音響レンズと同等な効果を発揮する音響レンズを設けることで、音響レンズのみで到来波の垂直および水平方向に分解することを可能とする。音響レンズ通過後の超音波を検出することにより、反射波の到来方向を知りイメージングが可能となる。また、小型で高分解能、広視野角な音響レンズを提供する。さらに、低消費電力かつ、高フレームレートな水中映像取得装置を提供する。
(もっと読む)
多重検知装置及びその方法
【課題】多数の超音波センサーが互いに異なる送信周波数を使用するようにして単一の分析集積回路を使用できるようにした多重検知装置及びその方法を提供する。
【解決手段】該当送信周波数の超音波信号を発信する送波部110と、送波部110から発信した超音波信号を受信して出力する受波部130を備えた多数の超音波センサー100と、多数の超音波センサー100の各送波部110に対して該当送信周波数の超音波信号を発信するように制御し、各受波部130から出力した超音波反射信号を受信して発信時間と受信時間との時間差を利用して超音波センサー100が検知した物体の距離を計算して出力する分析集積回路200と、を含む。
(もっと読む)
物体検知装置
【課題】超音波振動子の残響振動が小さい場合でも残響振動の中に埋もれた反射波を検出し、近距離に存在する物体を検知することのできる物体検知装置を提供する。
【解決手段】物体A1に超音波を送波して物体A1で反射した反射波を受波する超音波振動子1と、超音波振動子1を第1の周波数f1で駆動させた後に第1の周波数f1とは異なる第2の周波数f2で超音波振動子1を駆動させる駆動部2及び制御部3と、第1の周波数f1と第2の周波数f2との差分に基づくビート信号を検波する包絡線検波部7と、包絡線検波部7の出力に基づいて物体A1を検知する信号処理部8とを備えた。
(もっと読む)
物体検知装置
【課題】コストを増大することなく極近距離に存在する物体を検知することのできる物体検知装置を提供する。
【解決手段】超音波を送受波する超音波振動子1と、物体A1からの反射波の受波に要する時間に基づいて近距離及び遠距離の物体A1を検知する第1のゲート期間G1及び第2のゲート期間G2を設定する制御部4とを備え、制御部4は、両ゲート期間G1,G2で反射波を受波した状態から第2のゲート期間G2のみで反射波を受波する状態に移行すると、第1のゲート期間G1で検知する位置よりも近い位置に物体A1が存在すると判定する。
(もっと読む)
電子装置、硬さ算出方法、及びプログラム
【課題】音波を用いることにより、物体の硬さを検出する。
【解決手段】発振部110は、センサ用音波を発振する。検出部120は、物体で反射したセンサ用音波を検出する。距離算出部130は、発振部110がセンサ用音波を発振してから検出部120がセンサ用音波を検出するまでの時間に基づいて、物体までの距離を算出する。硬さ算出部140は、検出部120が検出したセンサ用音波の強度、及び距離算出部130が算出した距離に基づいて、物体の硬さを算出する。
(もっと読む)
移動物体検出装置
【課題】監視空間を広げることで死角を少なくした移動物体検出装置を提供する。
【解決手段】送受波器2は、超音波振動子20と、発振回路1から出力される送波信号E02を反転させた信号により超音波振動子20を駆動するインバータ22とを備え、超音波振動子20は、インバータ22からの送波信号により超音波を監視空間にするとともに、超音波が監視空間に存在する物体に反射して生じる反射波を受波して受波信号を出力する。差動回路3は、超音波振動子20に入力される信号と、超音波振動子20から出力される信号との差分を出力する。送波信号にはインバータ22の電源ノイズが重畳され、電源ノイズの重畳した送波信号に受波信号が加わった信号が超音波振動子20から出力される場合でも、差動回路3により電源ノイズが重畳された送波信号を打ち消して、受波信号のみが出力される。
(もっと読む)
音源探査装置
【課題】背景雑音の影響を受け難く、複雑な信号処理を行うことなく高精度に音源定位を行うことが可能な音源探査装置を提供する。
【解決手段】音源探査装置1は、両指向性を有する複数の差動マイクロホン10と、同一平面内に複数の差動マイクロホン10がアレイ配列されるように、複数の差動マイクロホン10を支持する支持部材20と、を備える。複数の差動マイクロホン10は、指向性の主軸が前記同一平面に対して略垂直となるように支持部材20に支持されている。
(もっと読む)
車両周辺監視装置
【課題】路面状態に拘わらず、受信した反射波から路面による反射波を取り除くことにより、車両周辺に存在する障害物の検知精度を向上させることができる車両周辺監視装置を提供する。
【解決手段】車載カメラ2が撮像した車両周辺の路面の撮像画像に基づいて、路面状態判断部3が路面状態を判断し、この路面状態に基づいて閾値パターン決定部6が閾値パターンを決定し、障害物検知部4が決定された閾値パターンを用いて受信した反射波から路面による反射波を取り除いた後の信号に基づいて障害物の有無を検知することにより、路面状態に応じて適切な閾値パターンが決定され、路面状態に拘わらず、受信した反射波から路面による反射波を取り除くことができ、車両周辺に存在する障害物の検知精度を向上させる。
(もっと読む)
音源方向検出装置及び音源方向検出方法
【課題】従来よりも簡易な構成で、音源が存在する方向を検出できる音源方向検出装置及び音源方向検出方法を提供する。
【解決手段】音源5から出力される音波の各周波数毎に指向性を変化させると共に、各周波数毎に音波の強度を検知する音響センサ2を備え、当該音響センサ2で検知された各周波数毎の検知結果の出力比と、音源5の方向との関係を表した参照情報T100を記憶部3dに予め保持しておくようにした。また、音源方向検出装置では、音源5の方向を検出する際に、算出部3aで算出された出力比に対応した角度を、参照情報T100から推定角度として読み出すようにした。これにより音響センサ2に設けられた1つの音圧検知部4によって音源5の方向を検出できることから、従来のように音源5から発せられる音波を検出するための電子部品たるセンサを複数個設ける必要がなく、その分だけ従来よりも簡易な構成にできる。
(もっと読む)
水中探知装置及び魚種判別方法
【課題】本発明は、水中を遊泳する魚の魚種を判定する水中探知装置及び魚種判別方法を提供することを目的とする。
【解決手段】単体魚からの反射信号の包絡線は、最も反射強度の強い浮き袋からの反射波と、それ以外の部位からの反射波に大別される。本発明は、浮き袋以外から反射波が魚種により異なることに着目し、探知対象物の反射信号から検出された包絡線の、振幅値の最も高いピークと、当該ピークの前又は後に存在するピークの情報に基づいて、探知対象物の魚種を判別するものである。
(もっと読む)
駐車位置探索システム
【課題】車両方向を認識できる駐車位置探索システムを得ること。
【解決手段】本発明の駐車位置探索システムにおいて、携帯電子キー1は、探索開始ボタン11と、探索開始ボタン11がONの間、車両2との間で識別可能なIDを含む無線信号を送信する無線ID送信部12と、応答信号を受信する指向性超音波センサー13と、受信レベルを探索者へ通知する受信レベル通知部14とを備え、指向性超音波センサー13は、指向性を有し、車両2方向に向けて応答信号を受信した場合に応答信号を最大受信レベルで受信し、車両2は、無線信号を受信する無線受信部21と、受信した無線信号に携帯電子キー1との間で識別可能なIDが含まれているかを判定するID判定部22と、識別可能なIDが含まれていると判定された場合に応答信号を送信する超音波送信部23とを備える。
(もっと読む)
音源・振動源の探査方法と音源・振動源探査システム
【課題】音と振動とが同時に観測されたときに、観測された音が観測された振動源の発生する音かどうかを判別することのできる方法とそのシステムを提供する。
【解決手段】マイクロフォンM1〜M5を備えた音圧レベル測定手段11と、振動センサG1〜G4を備えた振動レベル測定手段12とを用いて、音源から伝搬する音と振動源から伝搬する表面波の振動とを同時に測定して、上記音の音圧レベルのデータから得られた音源方向の水平角θと上記振動の振動レベルのデータから得られた振動源方向の水平角θ’の方向とを比較して、観測された音が、音の発生を伴う振動源からの音であるか、あるいは、振動を伴わない音源からの音であるかの判定や、振動源が音を伴わない振動源であるかどうかの判定を的確に行うができるようにした。
(もっと読む)
障害物検知システム及びこのシステムの障害物センサ診断方法
【課題】障害物検知システムに用いられる障害物センサの異常を容易に検出できるようにする。
【解決手段】各障害物センサのそれぞれについて、送信部21から送信され、受信部22に直接廻り込む超音波信号23の検出有無を判断し、検出有の障害物センサを正常センサとして認識し、検出無しの障害物センサを異常センサとして認識する。
(もっと読む)
スキャニングソナー装置および追尾方法
【課題】指定した追尾対象の追尾を継続することができるスキャニングソナー装置および追尾方法を提供する。
【解決手段】前回の観測結果において追尾対象とした像の重心の座標の絶対位置を基準位置とし、その周囲に追尾対象が含まれるように設定した領域を第1の観測領域として設定する第1の領域設定手順と、第1の領域設定手順によって設定された第1の観測領域内の基準位置に今回の観測結果による追尾対象の候補が存在するか否かが最初の判断である判断方法により次に追尾対象とする当該候補を設定する追尾対象設定手順と、を含む。
(もっと読む)
距離測定装置及び車高測定装置
【課題】距離を測定する対象となる物体の材質や状態によらず超音波を用いて距離を測定すること。
【解決手段】受信された反射波の電圧値の最大値を記憶するホールド手段106を備え、測定対象物に対して所定周期の超音波を発信し、発信された超音波が測定対象物により反射された反射波を受信し、所定周期よりも短い周期でホールド手段106に記憶されている最大値を読み出し、読み出された値の変化が所定期間にわたって所定値以内である場合に、超音波発信手段104より超音波が発信されたタイミングから、当該所定期間の最初に値が読み出されたタイミングまでの時間に基づき、超音波発信手段104と測定対象物との距離を算出する。
(もっと読む)
船舶推進音検出装置、船舶推進音検出方法、及び船舶推進音検出用プログラム
【課題】推進音が小さくても船舶から放出される船舶推進音を有効に検出することを可能とした船舶推進音検出装置等を提供すること。
【解決手段】到来する前記水中音波を音波信号として受信する水中音波受信器103と、この受信された音波信号をA/D変換するA/D変換器4と、このA/D変換された音波信号を周波数分析し且つ想定される船舶推進音の周波数帯で音圧レベルが周期的に変化する音圧波形データを周波数毎に抽出する船舶推進音抽出手段5とを有する。更に、この抽出された音圧波形データの音圧レベルの周期的変化率を周波数成分毎に算出する周期的変化率算出手段6と、この算出された音圧レベルの周期的変化率(周波数成分ごとの音圧変化率)の周期を周波数成分毎に前記船舶推進音の周期として特定する変動周期特定手段7とを備えたこと。
(もっと読む)
音源位置推定システム
【課題】音情報を視覚化する発光装置を用いた音源定位推定システムを提供する。
【解決手段】音情報を視覚化する発光装置を用いた音源定位推定システムであって、フィールド30内の音源1,2からの音声を入力するマイクと該マイクで入力した音声に基づいて発光する発光手段とを備えた発光装置40と、発光装置40の発光情報を生成する生成部と、生成部からの発光情報に基づいて音源位置を判断する音源定位部60と、を有する。
(もっと読む)
距離測定装置
【課題】超音波を利用し2点間の距離計測をするセンサユニットにおいて、その周囲に反射物が存在しても、その影響を低減し安定な距離計測を可能にする。
【解決手段】センサユニットは水平面の全方位へ向けて超音波信号を発信する全方位超音波発信器100と、水平面の特定の方位より到来する超音波信号を受信する超音波受信器101〜106を備える。反射物検出モードでは、全方位超音波発信器100より超音波信号を発信させ、所定時間内に該超音波信号が超音波受信器101〜106の1つ以上で受信された場合に、それら超音波受信器による受信信号レベルに基づいて反射物の存在する方向を求め、該方向に対応した一部の超音波受信器の受信感度をそれ以外の超音波受信器の受信感度より下げる制御を行う。
(もっと読む)
1 - 20 / 85
[ Back to top ]