
Fターム[5J084BA47]の内容
光レーダ方式及びその細部 (24,468) | 装置の光学系 (4,875) | 投受共軸であるもの (36)
Fターム[5J084BA47]に分類される特許
1 - 20 / 36
距離測定装置

【課題】複数視野を同時に測定することができる距離測定装置を提供する。
【解決手段】距離測定装置は、測定光を射出するレーザ光源と、測定対象物からの反射光を検出する光検出器と、第1の反射鏡、第1の反射鏡の周囲に配置された第1の保持枠、第1の反射鏡を第1の保持枠に対し垂直軸の周りに回転可能に軸支する第1の支持梁、第1の保持枠の下部表面に配置された第2の反射鏡、第1の保持枠の上部表面に配置された第3の反射鏡、第1の保持枠の周囲に配置された第2の保持枠、及び第1の保持枠を第2の保持枠に対し水平軸の周りに回転可能に軸支する第2の支持梁を備えた光走査装置と、レーザ光源から射出された測定光を光走査装置に導光すると共に光走査装置で受光された反射光を光検出器に導光する導光光学系と、レーザ光源及び光走査装置の各々を駆動制御すると共に光検出器の検出信号に基づいて測定対象物までの距離を演算する制御部と、を備える。
(もっと読む)
レーザセンサ装置

【課題】高速で三次元領域での測定を可能とし、さらに迷光による測定精度の悪化を防止する。
【解決手段】ポリゴンミラー3を収容する収容ケースの内部をレーザ投光器からポリゴンミラー3の反射面に至る第1空間とポリゴンミラー3の反射面から受光器に至る第2空間とに分割する遮光部と、ポリゴンミラー3を回転させることによって測定用レーザ光を第1方向に走査する第1走査部4と、ポリゴンミラー3を第1走査部4による回転の中心軸に対して交差する中心軸を中心として回動させることによって測定用レーザ光を第1方向と交差する第2方向に走査する第2走査部5とを備える。
(もっと読む)
レーザレーダ装置
【課題】レーザ光の照射経路上のカバーで生じる内部反射光(外乱光)が受光センサに入り込むことをより確実に抑制することができ、外乱光に起因する誤検出を効果的に防止し得る構成を提供する。
【解決手段】レーザレーダ装置1では、受光面20aの前方側且つ下側寄りの位置を部分的に覆う構成で遮蔽部材70が配置されている。この遮蔽部材70には、受光面覆い部77と、上下に並ぶ複数の凸状部71とを備えており、いずれの凸状部71も、中心軸42aを通り且つ受光面20aの中心位置を通る切断面において外形が三角形状となっており、隣接する凸状部間には窪み79が形成されている。そして、窪み79の上側に配置される凸状部下方面は、レーザ光L1が凹面鏡41から前方側に照射されるときに、当該レーザ光L1の一部が透過板80で反射して生じる鏡面反射成分又はガウス拡散成分を窪み79の内壁に向けて反射するようになっている。
(もっと読む)
距離計
【課題】ユーザが誤った取り扱いをするのを回避することができ、これを通じて正確な計測結果を与えることができる距離計を提供する。
【解決手段】ハウジング10と、ハウジング内に設けられた、光ビームを用いて、目標物までの距離を非接触で計測するための測距部20と、ハウジング上に設けられた、ユーザが選択しうるようになっている少なくとも1つの計測起点50A〜50Dと、ハウジング上に設けられた、少なくとも測距部20を操作しうるようになっている操作ボタン30と、ハウジング上に、操作ボタンと関連づけられて設けられた、制御条件、および/または計測起点から目標物までの計測距離が示されるディスプレイ40とを備える距離計100において、ハウジング上に、ディスプレイとは別個に、計測起点50A〜50Dに1対1で対応し、いずれかの計測起点が選択された場合にアクティブ状態となる少なくとも1つの視覚的認識可能手段を設ける。
(もっと読む)
レーザートラッカー
【課題】 距離により最適なサーボゲインが異なるレーザートラッカーの制御において、距離情報を用いて、サーボゲインを最適な値にすることができるレーザートラッカーを提供する。
【解決手段】 レーザートラッカー1は、ターゲットTgにレーザービームLbを照射するレーザー光源2と、同レーザービームを直交する2軸回りにそれぞれ角度調整可能な角度調整手段3と、反射光を受光する受光部7と、照射するレーザービームLbと受光した反射光とからターゲットTgまでの距離を測定する測定手段4と、受光部7で認識された位置情報から可変ゲイン設定部に設定されたゲインに基づいて、角度調整手段3による角度を制御する制御手段5とを設ける。さらに測定手段4で測定した距離に反比例したゲインを求めて可変ゲイン設定部に設定するゲイン指令手段16を設けた。
(もっと読む)
レーザ測定装置
【課題】検出エリア内におけるレーザ光の実際の照射高さを容易に計測し得るレーザ測定装置を提供する。
【解決手段】レーザ測定装置100は、レーザレーダ装置1と検出用基準物体90とを備えている。検出用基準物体90の反射部は、所定の高さ方向における各位置が高さに応じた構造をなし、且つレーザ光L1が入射したときに、当該レーザ光L1が入射する高さに応じた内容の特定反射光を発するように構成されている。一方、レーザレーダ装置1は、回動反射機構40から照射されるレーザ光L1の走査エリア上に検出用基準物体90が配置されたときにこの検出用基準物体90からの特定反射光を検出している。そして、反射光の状態と高さ情報とを対応付ける対応データを参照して特定反射光の状態に対応する高さ情報を求め、検出用基準物体90におけるレーザ光の照射高さを計測している。
(もっと読む)
レーザスキャナ及びその製造方法
【課題】レーザスキャナにおいて角度の監視を簡単且つ確実に行うことができるようにする。
【解決手段】監視領域20にある物体を検出するためのレーザスキャナ10であって、発射光線16を出射するための発光器12、前記発射光線16を前記監視領域20へ向けて周期的に偏向させるための回転可能な偏向ユニット18、監視領域20にある物体により拡散反射された光線22から検出信号を生成するための受光器26、及び、角度単位形成体32を有し、前記偏向ユニット18の角度位置を検出できる角度測定ユニット32、34、38を備えるレーザスキャナ10において、前記偏向ユニット18を前記角度単位形成体32と一体的に構成する。
(もっと読む)
ビーム光投受光装置
【課題】同軸系タイプのビーム光投受光装置のコンパクト化及び組立て調整作業の容易化を図る。
【解決手段】光源210からスキャンミラー240に向かう投光ビームの光路と、対象領域内の物体から反射しスキャンミラー240から受光素子260に向かう戻り光の光路を分離する投受光分離部材を、1つのプリズム230で形成し、プリズム230は、投光ビームをスキャンミラー240方向に反射する反射領域231(外側反射面)と、スキャンミラー240からの戻り光を透過する透過領域232と、この透過領域232を透過した戻り光をプリズム内部で受光素子260方向に反射する内側反射面Dと有する構成である。
(もっと読む)
マルチ信号処理装置、測距装置、及びマルチ測距システム
【課題】高分解能の測距精度を確保しながらも極めて安価に複数台の測距装置をロボット等に組み込むことが可能なマルチ信号処理装置等を提供する。
【解決手段】
複数の測距装置1と接続され、各測距装置1から入力される発光要求信号のエッジを検知すると対応する測距装置の発光部を駆動する発光信号を出力する発光制御部110,120,130と、発光制御した測距装置の受光部から受光信号を入力する入力処理部140と、入力処理した受光信号に基づいて被測定物迄の距離を算出する演算処理部150と、各処理部により実行される一連の処理を、任意の測距装置から入力される走査角度信号の一周期内で、各測距装置に対して順番に実行させるジョブ管理部110,120とを備えている。
(もっと読む)
光波距離計
【課題】測距光の変調周波数を上げることなく測定精度を上げることができる光波距離計を提供する。
【解決手段】変調された可視測距光(L1)を出射する可視発光素子(108)と、可視測距光を受光して電気信号を発生する可視受光素子(109)と、可視受光素子からの電気信号で変調された赤外線等の非可視測距光(l2)を出射する非可視発光素子(114)と、非可視測距光を受光して電気信号を発生する非可視受光素子(115)とを備える。
(もっと読む)
レーザ測定装置
【課題】レーザ光の走査方向を様々な向きに変化させやすく設置場所に応じた多様なエリア設定が可能な構成をより小型且つ簡易に実現する。
【解決手段】レーザ測定装置1は、偏向部41を中心軸42aに対して相対的に変位させることで、空間に照射されるレーザ光L1の水平面に対する傾斜角度を変化させる傾斜角度変更部100を備え、更に、偏向部41からのレーザ光L1の走査経路上に配置される受光面91を備え、当該受光面91に入射するレーザ光L1の入射高さを検出する受光センサ90が設けられている。そして、レーザダイオード10にてレーザ光L1が発生してから当該レーザ光L1に応じた反射光がフォトダイオード20によって検出されるまでの経過時間を検出すると共に、その経過時間と受光センサ90によって検出された入射高さとに基づいて検出物体の位置を検出するように構成されている。
(もっと読む)
光導波路装置および校正システム
【課題】レーザレーダ装置から出射されたレーザ光の反射光が装置内へ入射するまでの時間を長くし得る光導波路装置を提供する。
【解決手段】光導波路装置30は、校正システム10の校正対象であるレーザレーダ装置20から窓部22を透過したレーザ光L0が導入口31aから入射する光導波路31が設けられており、この光導波路31は、その全長が導入口31aと窓部22との間の距離に対して長くなるように複数回巻回されて構成されている。
(もっと読む)
物体検出システム
【課題】複数のレーザセンサを備えた物体検出システムにおいて、あるレーザセンサから出力したレーザ光を他のレーザセンサが検出することによる誤検出を抑制する。
【解決手段】レーザセンサAは、自身の回転ミラー50の回転角度を算出し(ステップS2)、また、他方のレーザセンサBの回転ミラー50の回転角度を取得し(ステップS3)、これらステップS2、S3で算出、取得した回転角度と、記憶装置130に記憶されている誤検出角度関係とから、誤検出の危険性があるか否かを予測する(ステップS4)。そして、誤検出の危険性があると予測した場合、誤検出の危険性がなくなるように、モータ80の回転速度を調整する(ステップS5)。そのため、レーザセンサBから出力されるレーザ光L3を自身のフォトダイオード100が検出してしまうことが抑制され、その結果、実際には存在しない物体を検出したと判断してしまう誤検出を抑制できる。
(もっと読む)
環境を光学的に走査し測定する装置
レーザスキャナ(10)として構成された、環境を光学的に走査し測定する装置であって、回転鏡(16)によって発光光線(18)を放出する発光素子(17)と、回転鏡(16)および光軸(A)を有する受光レンズ(30)を通過した後にレーザスキャナ(10)の環境内の物体(O)から反射されるかあるいはその他の形で散乱した受光光線(20)を受け取る受光素子(21)と、レーザスキャナ(10)の環境のカラー画像を撮影するカラーカメラ(23)と、多数の測定点(X)について、物体(O)までの距離を求め、この距離をカラー画像と連係させる制御評価ユニット(22)とを含む装置において、カラーカメラ(23)は、受光レンズ(30)の光軸(A)上に配置される。 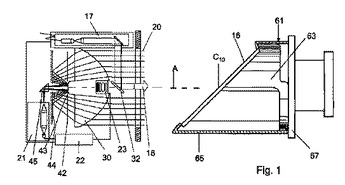 (もっと読む)
(もっと読む)
走行体
【課題】 回転走査型光学式測距センサの計測値の異常検出を行うことができる技術を提供する。
【解決手段】 前面に凹部2を有する走行体の外郭部3と、凹部2に設けられ、回転走査を行って凹部2から走行体の前方を臨む領域に存在する物体までの距離を測定する光学式の回転走査型距離センサ4と、凹部2の回転走査型距離センサ4の後方に設けられ、回転走査型距離センサ4によって測定される少なくとも二つの異なる既知の距離の経路L1,L2を形成する経路形成部5と、経路形成部5により形成された少なくとも二つの距離を回転走査型距離センサ4が計測した値l1、l2に基づいて、回転走査型距離センサ4の異常を検知する異常検知部6とを有する。
(もっと読む)
光測距装置
【課題】人間の眼の保護を図りながら、測距動作を継続できる光測距装置を提供する。
【解決手段】測距モードとして、安全モードと高精度モードとを備える。前記安全モードは、被曝放出レベルが最大許容露光レベルMPEよりも小さくなる「レーザ製品の安全基準」(JIS C 6802)のクラス1に相当するモードである。一方、高精度モードは、安全モードに比べてレーザ投光頻度を上げたり、走査振幅を絞ったりするなどの設定により、被曝放出レベルが最大許容露光レベルより高い、安全基準のクラス3Rに相当するモードである。ここで、測距動作で得た距離のデータと反射光量のデータとから、至近距離に人間の眼が存在することが検出された場合、高精度モードによるレーザ放射を停止させ、安全モードでレーザ放射を行わせる。
(もっと読む)
三次元形状測定装置
【課題】測定領域が狭小の場合のみならず比較的広大の場合であっても、被測定物の三次元形状を測定可能とする三次元形状測定装置を提供する。
【解決手段】色が規則的に経時変化する光パルスを生成するパルス光源30及びチャープ導入装置32と、生成された前記光パルスをワーク24の表面26に照射し、前記ワーク24で反射された前記パルス光を所定のタイミングで所定の光量だけ切り出し、前記光パルスの反射光像を取得する反射光像取得部70と、取得された前記反射光像の二次元情報及び色情報を用いてワーク24の三次元情報を取得するカラー二次元検出器52とを備え、反射光像取得部70は、ワーク24に照射される前記光パルスの照射領域42を拡縮する焦点位置補正部66と、拡縮された照射領域42に応じて前記光パルスを切り出す前記所定の光量を調整するシャッタ動作補正部68とを有する。
(もっと読む)
測距装置
【課題】不要なポインタ光の送光を止める測距装置を得る。
【解決手段】測距装置は、対象物に向けて測距用の光を送光する第1送光手段4と、測距開始操作信号に応じて、測距用の光が対象物との間を往復する時間に基づいて対象物までの距離を測る測距手段1,2と、対象物に向けて測距用の光と異なるポインタ光を送光する第2送光手段4と、第1送光手段4、第2送光手段4および測距手段1,2をそれぞれ制御する制御手段1とを備え、制御手段1は、第2送光手段4からポインタ光が送光されている状態で測距開始信号を受けると、ポインタ光の送光を停止させてから距離測定を開始させる。
(もっと読む)
送受信一体型光学装置
【課題】送信光学系及び受信光学系の同一視野内に目標を捕らえることが可能な送受信一体型光学装置を得る。
【解決手段】レーザ光を発生するレーザ光源1と、このレーザ光源1から出射したレーザ光を目標へ照射するとともに、目標からの反射光を集光する集光レンズ2又は回折レンズ6と、目標からの反射光を受光する受光センサ4とを備え、集光レンズ2又は回折レンズ6は、透過型グレーティング構造部3、反射型グレーティング構造部7、回折レンズ構造部8、プリズム構造部9、ミラー構造部10、あるいはスリット構造部11を持つものである。
(もっと読む)
測距装置
【課題】 可視光に色味の劣化の影響を与えずに光束を分別できる測距装置を提供する。
【解決手段】 測距装置は、測定光を照射する測定光源(1)と、対物レンズ(3)と、接眼レンズを有する視準光学系(6〜9)と、対物レンズの光軸に垂直な平面と平面及び対物レンズの光軸に傾斜する第一傾斜面とを有する光路分別部材(2)と、光路分別部材を介して目標物から反射された測定光を受光する受光素子(4)と、を備える。第一傾斜面は、視準光学系で使用する光の波長と測定光の波長とをそれぞれ分別する波長分別機能を有し、以下の条件を満足する。
(Sin−1(1/n)+Sin−1(1/n(SinθFNO)))/2<θ1<30°
θ1:対物レンズの光軸に対して垂直な平面と前記第一傾斜面とのなす角度;
FNO:対物レンズFナンバー;
θFNO:θFNO=tan−1(1/2FNO);
n:光路分別部材を構成する部材の測定光の波長の屈折率。
(もっと読む)
1 - 20 / 36
[ Back to top ]