
Fターム[5J084EA02]の内容
光レーダ方式及びその細部 (24,468) | 目的 (2,756) | ノイズ対策、S/N比改善 (427) | 背景ノイズ対策 (130)
Fターム[5J084EA02]に分類される特許
21 - 40 / 130
車両感知器
【課題】併設される際の干渉を防止するともに、ハードウェア構成を共通とした車両感知器の実現。
【解決手段】車両感知器100は、位相差方式の光波距離センサである距離センサ10を内蔵し、この距離センサ10による計測距離Lに基づいて、車両の有無を判定する。距離センサ10では、分周器14の分周比Nを変更することで、送信波の周波数を変更できるとともに、2位相ロックインアンプ30によって、受信信号から、送信波の周波数と同じ反射波の信号のみを抽出することができる。
(もっと読む)
距離測定装置、距離測定方法、および距離測定プログラム

【課題】物体までの距離を測定する距離測定装置において、簡素な構成で距離と輝度とを検出できる技術を提供する。
【解決手段】レーダ装置は、レーザ光を射出する発光部と、発光部からのレーザ光が物体に反射されることにより得られる反射光を受光し、この光量に応じた出力をする受光部と、を備えている。そして、レーダ装置は、レーダ処理にて、受光部による出力に基づいてレーザ光を反射した物体までの距離を演算し(S220)、また、受光部による出力に基づいて輝度を演算する(S230)。このレーダ装置によれば、物体までの距離だけでなく、受光部が受光することができる領域における輝度についても、レーダ装置の構成(ハードウェア)を利用して検出することができる。よって、簡素な構成で距離と輝度とを検出することができる。
(もっと読む)
物体認識装置
【課題】二次元走査タイプの物体認識技術において、送信波の反射によって得られる路面の検出結果(測距データ)が、路面からの反射なのか否かを判定できる物体認識装置を提供する。
【解決手段】測距データを一体化して物標データを生成する際に用いる探索領域内に別レイヤの測距データが存在しないという条件1が成立すれば、非立体物からの測距データであると判定する。測距データを、横軸を距離、縦軸を度数として所定の距離範囲毎のデータ数を表した距離ヒストグラムと、横軸を反射強度として同様に表した反射強度ヒストグラムを考える。「路面反射による測距データであれば発生するであろう度数の閾値」を設定し、距離ヒストグラム、反射強度ヒストグラムのいずれにおいても閾値を超える度数があるという条件2が成立すれば、路面からの測距データである可能性が高い。条件1、条件2が両方成立する場合に、路面からの測距データであるとして、削除する。
(もっと読む)
距離測定装置
【課題】アイセーフ波長のレーザ光を用いて低コストかつ高精度に距離を測定する。
【解決手段】レーザ光源24からのアイセーフ波長のレーザ光は、ポリゴンミラー21により走査されつつ測定対象に照射される。測定対象からの光はGLV32へと導かれ、GLV32からの回折光が光検出器35にて受光される。光検出器35は単一のフォトダイオードを備える。GLV32からは可干渉性の強い光のみが光検出器35へと導かれるため、レーザ光に由来する光のみが光検出器35にて検出される。GLV32において回折光を出射する領域を移動することにより、レーザ光に由来する光の入射位置が求められる。これにより、背景光の影響を受けることなく精度よく距離を測定することができる。また、単一のフォトダイオードを用いることにより、アイセーフ波長の光を低コストにて検出することができる。
(もっと読む)
レーザレーダ装置
【課題】検出物体の検出精度を高め得るレーザレーダ装置を提供する。
【解決手段】所定の回動角度において検出される受光波形が前回の同一回動角度において検出された波形に一致するとみなされる検出状態が継続して検出される場合に、この受光波形がその回動角度の背景波形として設定される。そして、遠距離側の受光波形の検出時間Tfがその回動角度における背景波形の検出時間Toに相当する、2つの波形が検出されるとき、この遠距離側の受光波形と背景波形との比率に基づいて、近距離側の受光波形に応じて検出される検出物体の回動方向長さが演算されて測定される。
(もっと読む)
レーザレーダ装置
【課題】レーザ光が透過板で反射して生じる外乱光に起因する誤検出を効果的に防止し得るレーザレーダ装置を提供する。
【解決手段】レーザレーダ装置1は、回動反射機構40などの各種部品を収容するケース3を備えており、このケース3には、凹面鏡41(偏向手段)からのレーザ光L1の走査経路上を閉塞する透過板80が設けられている。更に、透過板80の内壁部には、凹面鏡41からのレーザ光L1の一部が当該透過板80で反射して生じる外乱光L3を集光し、当該外乱光L3を、凹面鏡41、ミラー30(反射光誘導部)、及びフォトダイオード20(光検出手段)から外れた位置に導く導光部81が形成されている。
(もっと読む)
物体検出装置および情報取得装置
【課題】簡素な構成にて目標領域の情報を精度よく取得できる情報取得装置およびこれを搭載する物体検出装置を提供する。
【解決手段】情報取得装置1は、波長800nm程度の光を出射するレーザ光源11と、レーザ光源11の温度を調節する温調素子12と、レーザ光源11の温度を検出する温度センサ13と、目標領域から反射された反射光を透過させるためのフィルタ211と、フィルタ211を透過した反射光を受光して信号を出力するCMOSイメージセンサ23と、反射光に対するフィルタ211の傾き角を変化させるフィルタ駆動部200とを備える。CPU31は、温調素子12により設定可能な前記レーザ光源11の温度範囲内で、CMOSイメージセンサ23の受光量が最大となるよう温調素子12およびフィルタ駆動部200を制御する。
(もっと読む)
距離センサ及び距離画像センサ
【課題】開口率の向上を図ることが可能な距離センサ及び距離画像センサを提供すること。
【解決手段】距離画像センサRS1は、一次元状に配置された複数のユニットからなる撮像領域を半導体基板1上に備え、ユニットから出力される電荷量に基づいて、距離画像を得る。1つのユニットは、光感応領域と、空間的に離間して配置され、光感応領域からの信号電荷を収集する第3半導体領域9a,9bと、第3半導体領域9a,9bのそれぞれに設けられ、異なる位相の電荷転送信号が与えられる第1及び第2転送電極TX1,TX2と、空間的に離間して配置され、光感応領域からの不要電荷を収集する複数の第4半導体領域11と、第4半導体領域11のそれぞれの周囲に該第4半導体領域11を囲んで設けられ、光感応領域から第4半導体領域11への不要電荷の流れの遮断及び開放を選択的に行う第3転送電極TX3と、を備える。
(もっと読む)
対象物検出装置および対象物検出方法
【課題】目標とする対象物を精度よく検出するとともに、目標の対象物以外の誤検知を低減することができる対象物検出装置および対象物検出方法を提供する。
【解決手段】仰俯角方向に異なる角度を持った複数のレーザビームを照射しながら回転することによって対象物を検出するレーザレーダが対象物を検出したときの距離の情報に基づいて、人物候補を抽出する人物候補抽出手段と、レーザレーダが対象物を検出したときの高さの情報に基づいて、人物候補の高さを算出し、算出した人物候補の高さと、予め定められる人物の高さとに基づいて、人物候補抽出手段によって抽出された人物候補の中から人物を検出する人物検出手段と、を備える。
(もっと読む)
距離測定装置
【課題】距離測定装置に入射した光が前方の搬送台車からの反射光であるか否かを高精度で識別でき、誤検知による搬送台車の誤停止等を解消できる距離測定装置を提供する。
【解決手段】軌道に沿って走行する搬送台車の前部に、変調された測定光を平面状に走査する走査部と、走査部で走査された測定光と検出物からの反射光との時間遅れから検出物までの距離を算出する距離演算部とからなる測距装置を配置し、測距装置により前方を走行する搬送台車の後部に配置された再帰性反射部材からの反射光に基づいて搬送台車間の車間距離を検知する距離測定装置であって、走査部により走査された測定光の複数の走査角度と、距離演算部により算出された各走査角度に対応する距離と、各走査角度に対応する反射光の強度のうち、何れか二つの相関関係に基づいて、再帰性反射部材からの反射光であるか否かを識別する識別部を備える。
(もっと読む)
測距装置および測距方法
【課題】被測定物までの距離の測定結果のバラツキを抑制する。
【解決手段】測定制御部71は、複数の光出力レベルの測定光を用いて、各光出力レベル毎に被測定物までの距離の測定処理を所定の回数ずつ実行するように、測距装置1の各部を制御する。統計処理部83は、所定の回数の測定処理において、受光した光の強度を示す受光信号の所定のサンプリング周期毎の値が所定の閾値以上となる回数を各所定の時間毎にカウントすることにより得られる度数分布を、各光出力レベル毎に作成する。選択部72は、各光出力レベルに対する度数分布の中から、被測定物までの距離の演算に用いる度数分布を選択する。演算部73は、選択された度数分布を用いて、被測定物までの距離を演算する。本発明は、例えば、被測定物までの距離を測定する測距装置に適用できる。
(もっと読む)
空間情報検出装置
【課題】物体の反射率にかかわらず物体までの距離が測定可能範囲外であるときに検出した空間情報を無効にすることで誤検出を防止する。
【解決手段】発光源1が対象空間に投光し、受光センサ2では規定の受光期間の電荷を集積し、さらに受光期間よりも長い蓄積期間に亘って蓄積した電荷を取り出す。発光源1の光出力は、2値の信号値の継続期間がそれぞれ単位期間の整数倍の期間となるように蓄積期間において乱数的に発生させた方形波信号で変調される。受光センサ2の受光期間は、変調信号に基づいて生成されたタイミング信号で規定される。距離演算部6は、タイミング信号に対応する電荷量を用いて物体までの距離を算出する。正誤判断部7は、2種類のタイミング信号を用いて得られる2種類の電荷量の差分を正規化して評価値に用い、評価値を用いて物体までの距離が測定可能範囲外と判断したときに空間情報を無効にする。
(もっと読む)
光測距装置
【課題】霧などの外乱の中に測定対象物が存在する場合であっても、この測定対象物を見落としなく検出できる光測距装置を提供する。
【解決手段】受光素子の検出信号のレベルが閾値に到達した時点を受光タイミングとして検出する立上がり回路と、受光素子の検出信号をフィルタリングした後の信号のゼロクロス点を受光タイミングとして検出する共振回路とを備え、前記立上がり回路の閾値を、霧などの外乱からの反射光について受光タイミングを検出しないように設定する。そして、両回路が同じ受光タイミングを検出した場合には、光量に基づいてより高い精度を示す回路を選択して距離データを出力させる。また、共振回路による受光タイミングの検出の後で、立上がり回路が受光タイミングを検出した場合は、立上がり回路で検出された受光タイミングを選択して、距離データを出力させる。
(もっと読む)
空間情報検出装置
【課題】環境光や周囲光の影響を受けることなく物体までの距離が測定可能範囲外であるときに検出した空間情報を無効にすることで誤検出を防止する。
【解決手段】発光源1が対象空間に投光し、受光センサ2では規定の受光期間の電荷を集積し、さらに受光期間よりも長い蓄積期間に亘って蓄積した電荷を取り出す。発光源1の光出力は、2値の信号値の継続期間がそれぞれ単位期間の整数倍の期間となるように蓄積期間において乱数的に発生させた方形波信号で変調される。受光センサ2の受光期間は、変調信号に基づいて生成されたタイミング信号で規定される。距離演算部6は、タイミング信号に対応する電荷量を用いて物体までの距離を算出する。正誤判断部7は、2種類のタイミング信号を用いて得られる2種類の電荷量の差分を評価値に用い、評価値を用いて物体までの距離が測定可能範囲外と判断したときに空間情報を無効にする。
(もっと読む)
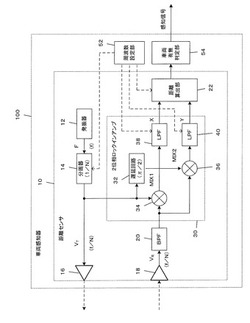
光波距離計
【課題】位相差方式の光波距離計による遠距離測定の測定誤差を小さくする。
【解決手段】複数の変調周波数(F1、F2、F3)を重ね合わせる周波数重畳回路(3)と、周波数重畳回路で重ね合わされた複数の変調周波数で変調された光を出射する発光素子(11)と、発光素子から出射された光を受光する受光素子(30)と、受光素子に接続される複数の周波数変換器(32,35,38)とを備えた光波距離計において、前記周波数重畳回路が、最も低い変調周波数(F3)以外の変調周波数が入力されるAND回路と、AND回路の出力及び最も低い変調周波数が入力されるXOR回路とから構成される。そして、最も低い周波数の局部発振信号が、2番目に低い変調周波数(F2)と最も低い変調周波数(F3)との差又は和といくらか異なる周波数(F2−F3+ΔF3)とされる。
(もっと読む)
空間情報検出装置
【課題】複数台の空間情報検出装置が存在する場合でも、独立して空間情報を検出する。
【解決手段】空間情報検出装置は、対象空間に投光する発光源2と、発光源2から投光する光の強度を変調する発光制御部3と、対象空間からの受光光量に応じた電荷を生成する光検出素子1と、光検出素子1の出力から対象空間に存在する物体Obまでの距離を求める距離演算部4とを備える。発光制御部3は、投光期間と休止期間とを設けるように発光源2を制御する。距離演算部4は、休止期間の電荷から環境光成分における変動成分の存否を判定する干渉判定部を備える。距離演算部4は、光検出素子1が受光する環境光成分のうち特定の2種類の位相区間の差分の積算値を所定の積分時間において求め、干渉判定部において積算値の差分が環境光成分の影響を受けていると判定した場合は当該差分を採用せず、差分が閾値以下の場合に当該差分を用いて空間情報としての距離を求める。
(もっと読む)
物体検出装置および電子機器
【課題】被検出物からの反射光の検知感度を下げることなく、被検出物以外からの反射光による誤検知を防止する。
【解決手段】受光手段が、第1の受光素子201、第2の受光素子202、および第3の受光素子203によって構成される。被検出物以外からの反射光スポット131は、第2の受光素子202側にずれて形成されるため、第1の受光素子201の出力から第2の受光素子202の出力を減算することで誤検知を防止する。被検出物からの反射光スポット130については、さらに第3の受光素子203の出力を加算することで第2の受光素子202の検出成分をキャンセルする。
(もっと読む)
画像撮像装置
【課題】レーザレーダの測距精度の向上、レーザ光路上に複数の目標が有る場合への対応、および霧・雨等の影響を除去したデータ(画像)の取得。
【解決手段】レーザ照射後、光路上の全ての反射レーザ光の信号レベルをA/D変換器により時系列に取得する。A/D変換した信号からソフトウエアによる移動平均、ピーク検出処理により受光信号のピークレベルを正確に検知し、精度の高い測距データを得る。また、A/D変換データ上にある複数のピークを検出することにより、複数目標の距離を測定可能となる。更に、A/D変換データ上の所定の閾値以上の反射信号強度のみを抽出、表示することにより、霧・雨や背景のデータを削除した画像を表示する。
(もっと読む)
2次元及び3次元位置検出システム、及びそのセンサ
2次元及び3次元の位置検出システム、ならびにそのシステムで使用されるセンサが開示される。センサは、線形アレイセンサ、及び、光又は他の放射線がセンサの大部分の素子に到達するのを遮るための開口プレートを内包する。相対的な放射線源の方向が、各センサの内の放射されたセンサ素子に基づいて、決定される。センサは、放射線源の位置を推定可能とするために、システム内に組み合わされる。 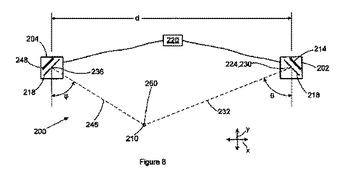 (もっと読む)
(もっと読む)
走行車
【課題】前方の走行車を検出可能なスキャンセンサを備えた走行車において、スキャンセンサの誤検出を減らす。
【解決手段】走行車3は、走行車本体と、スキャンセンサ4と、フィルタ7とを備えている。スキャンセンサ4は、前方の走行車3を検出可能なセンサであり、測定範囲の一部の特定の光線が斜めに投射されるように水平面より傾けて配置されている。フィルタ7は、光量を減衰させるためのものであり、特定の光線に対して平面視で直交する方向に配置されている。
(もっと読む)
21 - 40 / 130
[ Back to top ]