
国際特許分類[B23Q17/00]の内容
処理操作;運輸 (1,245,546) | 工作機械;他に分類されない金属加工 (71,475) | 工作機械の細部;構成部分,または付属装置,例.倣いまたは制御装置;特定の細部または構成部分の構造により特徴づけられる工作機械一般;特定の結果を目的としない金属加工機械の組合わせ (8,929) | 工作機械上において指示または測定する装置の配置 (1,211)
国際特許分類[B23Q17/00]の下位に属する分類
切削圧または切削工具状態,例.切削能力,工具負荷,を指示または測定するもの (117)
切削速度または回転数を指示または測定するもの (5)
振動を指示または測定するもの (95)
工作物の特徴,例.輪郭,寸法,硬度,を指示または測定するもの (144)
工具または工作物の現在位置または所望位置を指示または測定するもの (256)
光学系を用いるもの (185)
国際特許分類[B23Q17/00]に分類される特許
71 - 80 / 409
加工装置
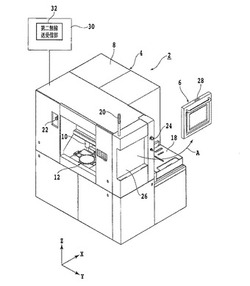
【課題】 作業者の身長によらずコマンドの入力及び操作画面の読み取りが容易な表示モニタを備えた加工装置を提供することである。
【解決手段】 被加工物に加工を施す加工手段と該加工手段を収容するハウジングとを有する加工装置本体と、該加工手段の動作条件を入力する操作画面を表示する該ハウジングに配設された表示モニタとを備えた加工装置であって、該表示モニタは、該ハウジングに対して着脱可能に構成され、入力された操作情報を該加工装置本体へ送信するとともに該加工装置本体からの情報を受信する第1無線送受信部を有し、該加工装置本体は、該表示モニタからの該操作情報を受信するとともに該表示モニタへ情報を送信する第2無線送受信部を有する制御手段を備えたことを特徴とする。
(もっと読む)
加工機械の縦方向軸の制御方法

【課題】 縦方向駆動軸がハイリードボールネジ、リニアモータにより駆動されるので駆動トルクや加工推力を大きくすることは出来ないという欠点を取り除き、縦駆動軸の推力増加方法を提供すること。
【解決手段】 カウンターバランスの調節機構により制御される縦方向駆動軸を支えた縦方向軸本体を有する加工装置の縦方向軸制御方法において、縦方向主軸本体の駆動方向や目標位置との偏差または軸駆動モータの駆動電流の変化を測定し、カウンターバランスの調節機構を制御し、前記縦方向主軸本体の重力を駆動トルクや加工推力に利用する、ことを特徴とする縦方向軸制御方法。
(もっと読む)
位置決め装置
【課題】回転テーブルを支持する直動テーブルの傾きによる回転位置ズレを防ぎ、回転テーブル上の被加工物の位置決め精度を向上させる。
【解決手段】ロータリエンコーダを有する回転テーブル2は、移動方向に直交する2方向をガイド3a、3b及びベースプレート4によって支持された直動テーブル1に搭載される。リニアスケールカウンタ14a、14bの検出信号を減算器17によって減算することによって得られる直動テーブル1の傾きを、減算器19において、ロータリエンコーダカウンタ10の検出値から減算し、回転テーブル2の回転角度をフィードバック制御する。
(もっと読む)
ロケート装置
【課題】ワークの脱荷を確実に行いつつ、構造を簡素化できるとともにコストを削減できるロケート装置を提供する。
【解決手段】ワークWを所定の姿勢でクランプするときに、ワークWに形成されるクランプ孔W1に挿通するロケートピン30と、上端部がロケートピン30に収容され、ロケートピン30に対して相対的に移動することで、ワークWをクランプする、あるいはワークWをアンクランプするクランプアーム40と、を具備し、クランプアーム40には、上端部に配置され、ワークWをクランプするときに、ロケートピン30より外部に移動してワークWの上端面と当接するクランプ爪41と、クランプ爪41に対して、下方向に所定の間隔を空けて配置され、ワークWをアンクランプするときには、ロケートピン30におけるフランジ部31の上端面よりも、上方向に突出してワークWの下端面と当接し、ワークWを上方向に押し上げる脱荷爪42と、が形成される。
(もっと読む)
測定装置
【課題】高い測定精度を有し、容易に仕上げできる測定装置を創作すること。
【解決手段】この発明は、工作機械、測定機械或いはロボットの運動軸線の立体的移動を検出する測定装置に関する。測定装置は、複数の長さ測定システム(2、3、4)が配置されている保持体(1)から成り、異なった立体的方向において測定球(5)に対する間隔を測定する。保持体(5)が球状形状を有し、複数の長さ測定システム(2、3、4)が保持体(5)の球状形状の中心点(M)の方向に測定するように整合されている。
(もっと読む)
工作機械の主軸装置
【課題】変位センサの検出部への異物侵入を防止し、検出精度の低下および検出部の劣化を防止することが可能な工作機械の主軸装置を提供することを目的とする。
【解決手段】工作機械の主軸装置1は、エアの供給源に接続されるエア流路11〜14が形成されたハウジング10と、ハウジング10に回転可能に支持される主軸40と、ハウジング10の所定位相に配置され、当該所定位相においてハウジング10に対する主軸40の変位を検出する変位センサ71〜74とを備える。変位センサ71〜74は、ハウジング10の内部においてエアの流通領域Rvに配置され、エア流路11〜14の開口部11a〜14aは、変位センサ71〜74が配置されたハウジング10の所定位相と同位相に位置する。
(もっと読む)
工作機械の主軸装置
【課題】変位センサの検出部への異物侵入を防止し、検出精度の低下および検出部の劣化を防止することが可能な工作機械の主軸装置を提供することを目的とする。
【解決手段】工作機械の主軸装置1は、流路11,12が形成されたハウジング10と、ハウジング10に回転可能に支持される主軸30と、ハウジング10に対する主軸30の変位を検出する変位センサ71〜74と、主軸30における変位センサ71〜74の検出部位に配置されるターゲット部43と、を備える。ハウジング10および主軸30により形成される隙間Apにエアを滞留する滞留領域Taが形成され、滞留領域Taの形成面にエア流路11,12の開口部11a,12aが形成され、変位センサ71〜74およびターゲット部43は、滞留領域Taの形成面において互いに対向するように配置される。
(もっと読む)
工作機械の主軸装置
【課題】主軸の回転速度を下げることなく、被加工物の加工中に振動が発生し得る場合にのみ振動抑制効果を発揮できる工作機械の主軸装置を提供する。
【解決手段】主軸20の外周面とハウジング10の内周面との間に配置され、主軸20に対して一体的状態と分離状態とを切換可能に設けられた着脱部材100と、着脱部材100とハウジング10との間に形成される空間120bに流体を介在させるために当該空間120bに流体を供給する流体供給装置130を備える。主軸20が振動する場合に、着脱部材100を主軸20に対して分離状態から一体的状態に切り換える。
(もっと読む)
観察点特定機能付きの工作機械
【課題】テレセントリック光学系顕微鏡システムを用いながらも、観察対象物のどこが観察点であるのかを容易に特定(判別)できるような観察点特定機能付きの工作機械を提供すること。
【解決手段】落射照明用の光源と光路とが設けられたテレセントリック光学系顕微鏡システムと、前記テレセントリック光学系顕微鏡システムの画像を撮影するCCDカメラと、前記CCDカメラで撮影された画像を処理することによって前記テレセントリック光学系顕微鏡システムの観察対象物を観察する画像処理装置と、前記落射照明用の光路に設けられたプリズムと、前記プリズムを介して前記落射照明用の光路にスポット光を合流させるスポット光源と、を備え、前記スポット光の前記観察対象物上の照射位置を当該観察対象物の観察点として特定できるようになっていることを特徴とする観察点特定機能付きの工作機械である。
(もっと読む)
停電時制御装置
【課題】工作機械で停電時の制御を行なう停電時制御装置において、抵抗放電ユニットや無停電電源装置を追加することなく、ワークと工具とを干渉しない領域まで退避させることによって、ワークまたは工具の破損を回避することができる。
【解決手段】入力電源1を監視して、停電を検出した場合には、サーボモータ用アンプ3,4にサーボモータ7,8の制御状態のまま減速停止を指令するとともに、スピンドルモータ9に通電遮断を指令する停電検出部10’と、前記停電検出部10’からの停電検出信号に応じてパワー回路2とサーボモータ用アンプ3,4とスピンドルモータ用アンプ5の直流電圧低下異常のアラームしきい値を通常運転時の値から停電時の値へと変更するアラームしきい値変更部11と、前記停電検出部10’からの停電検出信号に応じてあらかじめ規定した微小距離だけサーボモータ用アンプ3,4に退避動作を指令する退避動作指令部12を設ける。
(もっと読む)
71 - 80 / 409
[ Back to top ]