
国際特許分類[B60B19/00]の内容
処理操作;運輸 (1,245,546) | 車両一般 (234,424) | 車輪;キャスター;車軸;車輪の付着力を増大させるもの (6,118) | 他に分類されていない車輪 (224)
国際特許分類[B60B19/00]の下位に属する分類
用途の変更できるもの,例.道路用車輪から軌条用車輪に変更できるもの;道路と軌条の交互に使用できるように特別に設計した車輪 (1)
膨張できるもの
流体用隔室,パッキング,または荷役用具をもつもの;浮揚車輪 (3)
潤滑用道路,チャンネル,または貯蔵部をもつもの (2)
冷却用翼体をもつもの (3)
ローラ形車輪 (11)
ボール形車輪 (11)
国際特許分類[B60B19/00]に分類される特許
21 - 30 / 193
階段昇降車および車輪装置
【課題】階段を円滑に上り下りできる安価な階段昇降車を得る。
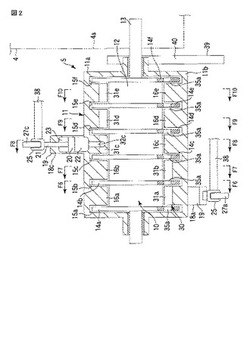
【解決手段】階段走行車は、車体(4)を支える走行輪(5)を有する。走行輪(5)は、固定軸(10)に支持された回転軸(11)と、回転軸(11)から放射状に突出された複数の油圧シリンダ(18a, 18c)と、油圧シリンダ(18a, 18c)のロッド(21)の先端に支持された複数の車輪(27a,27c)と、油圧シリンダ(18a,18c)に作動油を供給する油圧機構(30)とを備えている。
(もっと読む)
全方向車輪および移動装置

【課題】前後左右に障害物があっても乗り越えることができる全方向車輪を提供することを目的とする。
【解決手段】本発明の全方向車輪10は、外周に自由に回転する複数の小径輪12を設けた全方向に動く主輪13と、主輪13の側部に設置した主輪13の最大外径より小さい最大外径のガイド部14と、を備え、ガイド部14は、主輪13より離れるに従い外径が小さくなる形状とした構成である。このような構成により、ガイド部14が先頭になる方向へ動いている途中に障害物があったとしても、ガイド部14の外周縁15は傾斜しているので、障害物にぶつかると外周縁15の傾斜に沿って障害物を乗り越えることができる。
(もっと読む)
段差乗り越えキャスター
【課題】安全かつ容易に段差を乗り越えることができるキャスターを提供すること。
【解決手段】本発明の段差乗り越えキャスターは、脚、少なくとも2つの車輪、無限軌道および車輪ケースを備え、該車輪ケースは、該脚を軸にして回転し得るように、該脚に取り付けられており、該少なくとも2つの車輪の車軸は、車輪ケースに固定されており、該無限軌道は、該少なくとも2つの車輪の外周に接するように設けられ、そして該無限軌道が、最後方の車輪部分で路面に接し、最前方の車輪部分では路面から離れている。
(もっと読む)
移動装置
【課題】階段を昇降することも、平面上の全方向に移動することも可能な移動装置を提供する。
【解決手段】基体1に取付けられた車輪支持ユニット2を鉛直軸回りに回転させて、複数の大車輪7の水平な大車輪回転軸11を平面視で直交2軸方向に設定し、大車輪回転軸11に付与された駆動力を小車輪14の小車輪回転軸15に伝達すれば、小車輪回転軸15が移動方向と直交する小車輪14は小車輪回転軸15回りに回転され、小車輪回転軸15が移動方向と直交しない小車輪14ではフリーローラ16が自在に回転して平面上の全方向への移動が可能となり、複数の大車輪回転軸11を平面視で全て平行になるように設定し、階段の段差に小車輪14が当接してその回転が規制されると、大車輪7(大車輪本体12)が駆動力で回転し、当該大車輪7に取付けられている他の小車輪14が階段の段差を乗り越えて階段の昇降が可能となる。
(もっと読む)
車
【課題】その姿勢を傾斜状態に変化させ易く、かつ、該姿勢が適切な状態を維持することが可能な車を実現する。
【解決手段】回転軸回りに回転可能な車輪、を有する車であって、該車の姿勢を制御するための姿勢制御機構、を備える車であって、前記車輪は、前記回転軸の下方に位置し、該車の動作中に地面に接地可能な接地部、を有し、前記回転軸を含み、その法線の方向が水平方向となる仮想平面を第一仮想平面としたときに、前記接地部と前記第一仮想平面との交線は、直線部と、曲線部とを有し、前記曲線部上の点の中には、次の(1)の条件を満たす第一点が含まれることを特徴とする車。(1)前記第一点を含み、前記第一仮想平面と直交する第二仮想平面であって、該第二仮想平面の法線方向が前記第一点における前記曲線部の接線の方向となる第二仮想平面が、前記車の重心よりも下方に位置する。
(もっと読む)
農用作業機
【課題】従来の、弾性を有するスポンジ部材を円筒状の車輪本体の外周に被嵌して成る車輪を備えた農用作業機では、前記車輪本体へのスポンジ部材の装着に際し、スポンジ部材の装着強度が不十分でスリップしたり、接着して装着すると古い接着部材の除去に手間暇がかかり、スポンジ部材を外周に設けたゴムを車輪本体に装着しようとすると大きな力が必要となる、という問題があった。
【解決手段】後輪本体23の外周に直接被嵌したスポンジ部材16の接合端部16a・16aの間を、線ファスナー19により引張状態で連結する構成とした。
(もっと読む)
全駆動型回転体付き車輪
【課題】全ての回転輪を個々に回転駆動して段差を円滑に乗り越えることができる、全駆動型回転体付き車輪を提供する。
【解決手段】ホイール11を中空の車軸16で支持し、ホイール11周囲の複数の回転体12a,12bに従動プーリ13a,12bを備え、ホイール11内に第1のリング形太陽歯車14aを有する第1の回転分配伝達機構14及び第2のリング形太陽歯車15aを有する第2の回転分配伝達機構15を備え、車軸16を走行用モータ17で駆動し、第1のリング形太陽歯車14aを回転体駆動用第1モータ18で駆動し、第2のリング形太陽歯車15aを回転体駆動用第2モータ19で駆動する。モータ19,21への電力供給をスリップリングとブラシとで行い、制御は車軸16の中空部を通し通信により行う。回転体12a,12bを回転するときは、第1のリング形太陽歯車14a及び第2のリング形太陽歯車15aを同一方向に回転しかつ平均回転数が同一となるように位相を異ならせる。
(もっと読む)
全駆動型回転体付き車輪
【課題】全ての回転輪を個々に回転駆動して段差を円滑に乗り越えることができる、全駆動型回転体付き車輪を提供する。
【解決手段】ホイール11の周囲の複数の回転体12a,12bに従動プーリ13a,12bを備え、ホイール11内に第1の回転分配伝達機構14及び第2の回転分配伝達機構15を備え、中空の車軸16に中空の第1の回転体駆動軸18を通し、さらに第2の回転体駆動軸20を通し、ホイール11を走行用モータ17で駆動し、第1の回転分配伝達機構14を回転体駆動用第1モータ19で駆動し、第2の回転分配伝達機構15を回転体駆動用第2モータ21で駆動する。回転体12a,12bを回転するときは、第1の太陽平歯車14a及び第2の太陽平歯車15aを同一方向に回転しかつホイールに対して相対回転が生じるように、走行用モータ17と回転体駆動用第1モータ19と回転体駆動用第2モータ21とを回転制御する。
(もっと読む)
全駆動型回転体付き車輪
【課題】全ての回転輪を個々に回転駆動して段差を円滑に乗り越えることができる、全駆動型回転体付き車輪を提供する。
【解決手段】ホイール11の周囲の複数の回転体12a,12bに従動プーリ13a,12bを備え、ホイール11内に第1、第2の回転分配伝達機構14,15を備え、中空の車軸16に中空の第1の回転体駆動軸18を通し、さらに第2の回転体駆動軸20を通し、ホイール11を走行用モータ17で駆動し、第1の回転分配伝達機構14を第1の回転体用モータ19で駆動し、第2の回転分配伝達機構15を第2の回転体用モータ21で駆動する。制御部22は、横方向走行時には、回転体の接地位置の直径部分の周速が所定速度になるように回転体用モータ19,21を定速制御し、斜め方向走行時には、回転体の接地位置の直径が変化しても接地位置の直径部分の周速が所定速度になるように回転体用モータ19,21を変速制御する。
(もっと読む)
全駆動型回転体付き車輪及び倒立制御型一輪車
【課題】全ての回転輪を個々に回転駆動して方向変換することができる、全駆動型回転体付き車輪を提供する。
【解決手段】ホイール16の周囲の回転体17a,17bに従動傘歯車21a,21bを備え、1つ置きの回転体17aの従動傘歯車21aを第1の回転分配伝達機構22を介して第1の回転体用モータ18で駆動し、残り1つ置きの回転体17aの従動傘歯車21bを第2の回転分配伝達機構23を介して第2の回転体用モータ19で駆動する。制御部13は、前進時、後進時及び斜め方向走行時に右又は左へ方向変換するときは、一の回転体の接地状態が終わりになると共に次の一の回転体の接地状態が始まる、2つの回転体17a,17bが接地状態にある時間帯に、接地状態が終わりになる回転体の周速と、接地状態が始まる回転体の周速とを相違させるように、第1、第2の回転体用モータ18,19の制御を行う。
(もっと読む)
21 - 30 / 193
[ Back to top ]