
国際特許分類[B60T8/175]の内容
処理操作;運輸 (1,245,546) | 車両一般 (234,424) | 車両用制動制御方式またはそれらの部品;制動制御方式またはそれらの部品一般;車両への制動要素の構成一般;車両が不意に動くのを阻止するためのもち運びできる装置;制動装置の冷却を助長するための車両の改造 (12,974) | 車両の状態または路面状況の変化に適合するための車輪制動力の調整装置,例.制動力の配分を制限または変更するための装置 (5,901) | ブレーキを制御するために電気調整手段または電子調整手段を用いるもの (3,677) | 車両の加速時の過度な車輪回転の防止に特に適したブレーキ調整,例.トラクション制御のためのもの (131)
国際特許分類[B60T8/175]に分類される特許
11 - 20 / 131
差動制限機構の制御装置
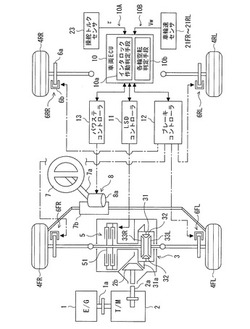
【課題】差動制限機構の制御装置に関し、差動制限機構の作動時に発生する操舵反力変化を操舵アシスト力によって抑制するものにおいて、操舵アシスト力を付与できない操舵アシスト側のインタロック作動時にも操舵反力変化を抑制することができるようする。
【解決手段】車両の左右輪4FR,4FLの差動を制限する差動制限機構5と、車両の操舵に対しアシストトルクを付加するパワーステアリング機構8とを有し、差動制限機構5の動作に応じて、パワーステアリング機構8の制御量を増減制御する制御手段10とを有すると共に、パワーステアリング機構8のインタロックの作動を検出するインタロック作動検出手段を有し、制御手段10は、インタロック作動検出手段によりインタロックの作動を検出した際には、差動制限機構5の制御量を減少させる。
(もっと読む)
車両の走行装置の状態を評価するための方法と装置、車両に対するカーブ警告方法ならびにコンピュータプログラム製品

【課題】より効率的に車両の走行装置の状態を評価する。
【解決手段】ブレーキ制御システムの少なくとも1つの制御信号と、走行データを検出するための手段の出力信号とを結合し、結合信号を取得し、結合信号に基づき走行装置の状態を評価する。
(もっと読む)
車両用ブレーキ制御装置
【課題】摩擦制動力と回生制動力とを併用した回生協調ブレーキ制御を行うとともにABS制御を実行する車両用ブレーキ制御装置において、ABS制御実行中においてABS制御に悪影響を与えることなくエネルギー効率を高めることができるものの提供。
【解決手段】この車両用ブレーキ装置は、前輪側の制動力を、摩擦制動力である液圧制動力(前輪側VB液圧分Fvbf+リニア弁差圧分Fval)と、回生制動力Fregとにより制御し、後輪側の制動力を、液圧制動力(後輪側VB液圧分Fvbr)のみにより制御することで回生協調ブレーキ制御を実行する。そして、この装置は、ABS制御実行中において、限界回生制動力Freglimitを、回生制動対象車輪である前2輪に働いた場合に前2輪にロックが発生しない範囲内の制動力の最大値に設定し、回生制動力Fregを同限界回生制動力Freglimitを超えないように調整する。
(もっと読む)
車両の駆動力制御装置
【課題】車両の加速時に駆動輪が回転振動するとき又はその虞れがあるときにはトランスミッションの変速比のアップシフト変更を促進することにより、車両の加速時に於ける駆動輪の回転振動を効果的に抑制する。
【解決手段】車両の加速時に(ステップ110)、駆動輪の回転振動を検出したとき(ステップ130)、若しく走行路がまたぎ路であると判定したときには(ステップ160)、駆動輪の回転振動が終息し(ステップ210)若しくはまたぎ路走行が終了するまで(ステップ220)、トランスミッション16の変速段を演算するための目標駆動力Fp_t_futureを漸減し(ステップ190、200)、トランスミッションの変速段のアップシフトを促進する。
(もっと読む)
電気自動車およびプログラム
【課題】様々な路面や走行条件下で安定した走行性を確保し、旋回性能を改善することができる電気自動車およびプログラムを提供する。
【解決手段】この電気自動車1は、前輪側の左右輪に第1の差動装置4fを介して制駆動力を伝達する第1の電気モータ3fと、後輪側の左右輪に第2の差動装置4rを介して制駆動力を伝達する第2の電気モータ3rと、第1および第2の電気モータ3f、3rの制駆動力を制御する制御部とを備え、第1および第2の差動装置4f、4rは、制御部により左右への動力配分率が制御可能な構成を有する。
(もっと読む)
ドライバー支援システム及びドライバー支援システムの調整のための方法
【課題】車両の中のブレーキ装置と車の車軸の二つの駆動車輪の間のアクティブリミテッドスリップデフとの間の、改良され且つ簡単化されたネットワークを作る。
【解決手段】ドライバー支援システムは被駆動車軸の車輪の上のブレーキ装置4並びにリミテッドスリップデフ3を含んでいる。少なくとも開ループまたは閉ループのいずれかを有する制御ユニット1の中で制動トルク又はロックトルクが求められ、その際少なくとも開ループまたは閉ループのいずれかを有する制御ユニット1の後方に配分モジュール2が接続されており、この配分モジュール2の中でブレーキ装置4及びリミテッドスリップデフ3の制御のための制御信号を生み出すことが出来る。
(もっと読む)
トラクションコントロール装置
【課題】駆動輪のスリップ状況に応じて各車輪の駆動力を適切に分配することができ、十分な加速性および旋回走行時のコーストレース性を確保できるトラクションコントロール装置を提供すること。
【解決手段】トラクションコントロール装置は、車輪の回転速度検出手段43FL〜43CRと、回転速度に基づき差動調整機構の制御を行うか否かを判定する制御開始判定手段82と、制御開始判定手段82の判定結果に基づき差動調整機構の制御を行う差動調整機構制御手段85とを備え、制御開始判定手段82は、左右輪回転速度差算出部と、左右輪の回転速度差が左右輪回転速度差用の所定の閾値以上となるか、または左右輪の回転速度比が左右輪回転速度比用の所定の閾値以上となった場合に、差動調整機構の制御を開始すると判定する制御開始判定部とを備える。
(もっと読む)
車輪速センサの異常検出方法及び車両のスリップ制御方法
【課題】センサ取付位置による誤差や外来ノイズ等の影響を受けず、車輪速センサの異常を検出すること。
【解決手段】左右の駆動輪の車輪速センサによる平均回転速度を検出し、変速機内の回転センサによる車輪速換算値を検出し、平均回転速度と車輪速換算値との差を逐次時間積分して相対角を求める。車輪速センサと回転センサとの各取付部での相対角の許容値を設定し、時間積分で得られた相対角がこの許容値を越えた場合に車輪速センサの異常と判定する。
(もっと読む)
路面状態判定装置及び車両の制御方法
【課題】路面状態を好適に判定可能にする。
【解決手段】路面状態判定装置33が、駆動輪3の空転の程度を表すスリップ値Sを測定するスリップ値測定手段41と、スリップ値測定手段41により測定されたスリップ値Sの変化率ΔSを演算する変化率演算手段42と、変化率演算手段42により演算されたスリップ値の変化率ΔSに応じて路面状態rを判定する判定手段43と、を備える。
(もっと読む)
車両の協調制御装置
【課題】 横滑り防止装置およびトラクションコントロール装置を協調制御する際に、車両の加速性能および旋回挙動性能の両立を図る。
【解決手段】 横滑り防止装置VSAおよびトラクションコントロール装置TCSを協調制御する協調制御手段が、駆動輪WRL,WRRの車輪速と車体速とを比較して該駆動輪WRL,WRRのスリップ量を算出し、スリップ量が閾値以上の場合にはトラクションコントロール装置TCSを横滑り防止装置VSAに優先して作動させるので、先ずトラクションコントロール装置TCSでスリップ量が過大な状態を解消して旋回挙動制御の制御性を高めることができ、またスリップ量が閾値以上の場合には横滑り防止装置VSAをトラクションコントロール装置TCSに優先して作動させるので、車両の加速性能を最大限に確保しながら横滑り防止装置で旋回挙動を安定させることができる。
(もっと読む)
11 - 20 / 131
[ Back to top ]