
国際特許分類[B66C15/00]の内容
処理操作;運輸 (1,245,546) | 巻上装置;揚重装置;牽引装置 (23,365) | クレーン;クレーン,キヤプスタン,ウインチまたはタツクル用の荷物係合要素または装置 (4,090) | 安全装置 (235)
国際特許分類[B66C15/00]の下位に属する分類
ロープまたはケーブルが切断した場合に荷物係合装置を保持するためのもの (4)
衝突を防止するためのもの,例.同一軌道上で運転しているクレーンまたはトロリー間での衝突 (21)
警報装置の配置または使用 (15)
国際特許分類[B66C15/00]に分類される特許
121 - 130 / 195
クレーン誤操作防止装置
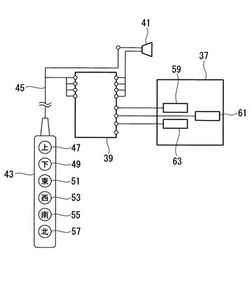
【課題】 指示した動作内容を動作が始まる前に確認でき、誤操作に対し早期に対応し、事故の発生を抑制し得るクレーンを提供する。
【解決手段】 動作を行う本体3、トロリ5およびフックブロック7と、これらの作動を制御する制御盤37と、それぞれ別個の動作を指示する複数の押釦を有し、該押釦を作動して制御盤37へ動作指示信号DSを送信するペンダントスイッチ43と、を備えるクレーン1であって、制御盤37およびペンダントスイッチ43の間に誤操作防止制御盤39が介装され、誤操作防止制御盤39は、動作指示信号DSの動作内容を継続時間Tkの間、音声による音声通報を行い、該音声通報の終了後に動作指示信号DSを制御盤37へ伝送するように構成されていることを特徴とする。
(もっと読む)
クレーンと台車の干渉制御方法および装置

【課題】複数の搬送設備を利用して効率よく物品の搬送を行うことができるクレーンと台車の干渉制御方法および装置を提供することを目的とする。
【解決手段】物品移載箇所に搬送物を吊荷し搬送するクレーンと、該クレーンの稼動範囲を走行する台車との干渉を回避する、クレーンと台車の干渉制御方法であって、台車が直下に存在しても干渉しない台車干渉回避高さまでクレーン吊荷を吊り上げて搬送する方法と、台車を非干渉エリアに移動して、前記台車干渉回避高さより低い移載箇所干渉回避高さでクレーン吊荷を行う方法のうち、いずれか作業効率の良い方法にて搬送する。
(もっと読む)
免震構造物対応の柱体ユニット接続装置
【課題】柱体を構成するユニットを接続している構造の現状をほぼ維持して、免震構造物に対応できる耐震性を備えた柱体ユニット接続装置を提供する。
【解決手段】免震装置を装備した構造物から独立に設置され、かつ要所にて上記構造物と結合される柱体を構成するユニットを接続する部分に用いる装置について、柱体を構成するユニット11の上下方向の端部に位置している接続部15と、接続部に挿通して柱体の上記ユニットを結合するボルト16及びナット17と、ボルト・ナットにより結合する箇所に介在させる弾性部材としての皿ばね20を具備しており、弾性部材はボルト・ナットの締結により接触している柱体の上記ユニットに外力が加えられたときに圧縮変形を生じて前記上下方向の接続端部に隙間を生じるように構成されている。
(もっと読む)
クレーン吊具給電用電動ケーブルリールの制御装置及び制御方法
【課題】電動ケーブルリールの停止中に、吊具の振れや巻き下げ動作等により吊具の支持力が給電ケーブルに掛かることを未然に防ぐことにより、給電ケーブルと電動ケーブルリールの損傷を防止するようにしたクレーン吊具給電用電動ケーブルリールの制御方法を提供すること。
【解決手段】電動ケーブルリールBの停止信号により、巻上装置Dによるクレーンの巻き下げ動作のみを禁止し、電動ケーブルリールBの停止時でもクレーンの巻き上げを可能とする。
(もっと読む)
高所作業車の点検装置
【課題】点検時の停車位置が傾斜地であってもその影響を受けることなく、絶対角方式の起伏角度検出器の故障検出において正確な判断を行うことができる、高所作業車の点検装置を提供する。
【解決手段】車体上に起伏動等の作動自在に設けられたブームの水平面に対する起伏角度の検出を行う絶対角方式の起伏角度検出器81と、ブーム操作レバー71の操作に応じてブームの作動を制御するためのブーム作動制御部61と、アウトリガジャッキが下方に張り出してその下端部が接地したか否かを検出する接地検出器55と、接地検出器55により全てのアウトリガジャッキが未接地状態から接地状態となったことが検出されている状態で、アウトリガジャッキの接地後、最初にブーム操作レバー71の操作が行われたとき、起伏角度検出器により検出された起伏角度が所定範囲に収まっているか否かを判定するセンサ判定部63とを備えて構成される。
(もっと読む)
タワークレーンの地震応答制御方法及び装置
【課題】タワークレーンが本来有する操作力のみによる地震応答制御を可能にする。
【解決手段】旋回架構の旋回方向及びブームの起伏方向について地震外乱を考慮した旋回方向及び起伏方向の低次元化モデルを導出する低次元化モデル導出手段11と、旋回用モータ及び起伏用モータの速度指令値に制限があることを踏まえ、旋回方向及び起伏方向の低次元化モデルを地震外乱の大きさに関する旋回方向及び起伏方向のパラメータ変動モデルに変形するパラメータ変動モデル導出手段12と、パラメータ変動モデルに対し線形行列不等式に基づくゲインスケジュールド制御理論を適用して地震加速度の大きさに応じた制御指令を旋回用モータ3と起伏用モータ5に入力するゲインスケジュールド制御系手段13を有する制御器6を構成する。
(もっと読む)
搬送台車及び光測距装置
【課題】部品コストの上昇を回避しながらも、僅かな大きさの障害物であっても精度よく検出でき、事故の発生を未然に回避できる搬送台車及び光測距装置を提供する。
【解決手段】上部空間に設置された走行レールに沿って自走し、搬送対象物を掴むチャック機構を備えた昇降体を所定の昇降経路に沿って昇降させる昇降機構が組み込まれた搬送台車であって、前記昇降経路上の障害物の有無を検出する光測距装置が前記昇降体に取り付けられるとともに、前記光測距装置による障害物の探索距離が前記光測距装置と前記搬送対象物の載置面との距離よりも短い距離に設定されている。
(もっと読む)
クレーンの免震支持装置
【課題】簡単な構造で且つバラスト等を一切搭載せずに、クレーンの安定性を高めつつ地震の揺れを効率良く吸収し得、更に全体の高さ寸法を抑えてコンパクト化を図り得るクレーンの免震支持装置を提供する。
【解決手段】固定設置部材としての基礎フレーム15と門形フレーム17とに対しマスト支持部材としてのベースブロック16を、マスト2の軸心からその半径方向へ等間隔となる位置においてベースブロック16を上下から挟み込むように配設される水平方向変位吸収手段としての積層ゴム支承13と転がり支承18又は滑り支承19とを介して支持せしめ、マスト2に作用する荷重並びに転倒モーメントを前記水平方向変位吸収手段の圧縮で受けるよう構成する。
(もっと読む)
クレーン制御システム装置
【課題】 中抜き、中落し時に吊具もしくは吊具に保持されたコンテナと既存に積まれているコンテナとの衝突を防止または回避することができるクレーン制御システム装置を提供する。
【解決手段】 トロリーに設置されるものであって、あるコンテナの積み上げ/積み下ろしする位置に隣接する他のコンテナと前記あるコンテナとの空隙の中心の鉛直上方に配置された複数個の検出器(20A,20B)と、前記検出器が走査し検出する前記空隙方向の距離を演算し、前記あるコンテナと前記他のコンテナとの衝突を前記距離と規定値との比較に基づいて判断する第1の演算処理部(30)と、前記演算処理部(30)において衝突が判断された場合、クレーンの巻上または巻下速度を制限する第2の演算処理部(31)と、を備えた。
(もっと読む)
クレーンの免震支持装置
【課題】通常運転時におけるクレーンの支持を安定化させつつ、地震等の大きな振動の発生時には構築物側の水平方向変位の影響がマストに及ぶことを防止し得、又、装置の大型化を回避してスペース的な面における制約も少なくすることができるクレーンの免震支持装置を提供する。
【解決手段】構築物12に対しマスト支持部材14を、Y方向の変位を吸収可能な第一積層ゴム15を介して連結すると共に、マスト支持部材14に対しマスト2を、X方向の変位を吸収可能な第二積層ゴム17を介して連結し、通常運転時には荷重を支持して第一積層ゴム15と第二積層ゴム17の変形を拘束し且つ構築物12又はクライミングクレーン1に作用する水平方向加速度が設定値以上となった時には塑性変形して第一積層ゴム15と第二積層ゴム17の変形を許容する第一トリガー手段16と第二トリガー手段18とを設ける。
(もっと読む)
121 - 130 / 195
[ Back to top ]