
国際特許分類[B66C23/88]の内容
処理操作;運輸 (1,245,546) | 巻上装置;揚重装置;牽引装置 (23,365) | クレーン;クレーン,キヤプスタン,ウインチまたはタツクル用の荷物係合要素または装置 (4,090) | ビーム,ブームまたは片持梁として作動する三角形状構造物を必須構成とし,これらが水平面,垂直面内の直進,揺動またはこれらの組合された運動をするよう取付けられているクレーン,例.ジブクレーン,デリツククレーンまたは塔クレーン (1,450) | 安全装置 (291)
国際特許分類[B66C23/88]の下位に属する分類
もち上げ動作を表示,もしくは制限するための装置 (115)
ジブの後方への揺動,例.ケーブルまたはタツクルが切れた場合の揺動,を防止するための緩衝機またはダッシュポット (13)
旋回運動を制限するためのもの (29)
国際特許分類[B66C23/88]に分類される特許
41 - 50 / 134
クレーンの安全確認装置
【課題】安全性と実用性に優れたクレーンの安全確認装置を提供する。
【解決手段】吊荷10の下方領域を含むクレーン周辺領域を上方から撮像するためのカメラ9a〜9eと、カメラ9a〜9eによって撮像されたクレーン周辺領域の画像を表示するために運転室に設けられたモニターと、カメラ9a〜9eによって撮像されたクレーン周辺領域の画像から作業者WのヘルメットHを認識する認識部を備える。認識部によって認識されたヘルメットHの画像を、モニターに表示されたクレーン周辺領域の画像に表示するように構成した。
(もっと読む)
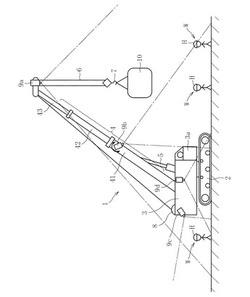
移動式ジブクレーン

【課題】 ジブクレーンの旋回体に配設されるカウンターウェイトを省略し、ジブクレーンの支柱に曲げモーメントが生じることを抑制する移動式ジブクレーンを提供する。
【解決手段】 ジブクレーン11の旋回体11aを鉛直軸周りに旋回させる旋回輪6と旋回体11aとの間に、ジブ11bの長手方向と直交する水平方向の揺動軸14aにより揺動可能な揺動機構14を介在させ、旋回体11aを該揺動軸14aで揺動可能とする。旋回体11aの後部側に、基端部を地上まで伸長させた張力索15の先端部を係止させ、その中間部を、伸縮ブーム4に回動可能に設けた旋回輪16に連繋させ、旋回輪16の回動を旋回体11aの旋回に同調させる。吊り荷重によって旋回体11aを揺動軸14aを中心として揺動させると、張力索15にこれと均衡する張力が生じ、伸縮ブーム4に曲げモーメントが作用するのを抑制する。
(もっと読む)
クレーン衝突防止装置
【課題】安価なクレーン衝突防止装置を提供する。
【解決手段】クローラクレーン1とタワークレーン2とが接近した際に、当該接近を報知するクレーン衝突防止装置10であって、タワークレーン2に装着された無線タグ20と、クローラクレーン1に装着され、無線タグ20から当該無線タグ20を識別するためのIDデータを受信するアンテナ31と、クローラクレーン1の運転室1bに設置され、アンテナ31によりIDデータが受信された場合に、クレーン同士の接近を報知する接近報知機34と、を備えることを特徴とする。
(もっと読む)
クレーンの制御装置及びクレーン
【課題】吊り荷の位置を正確に認識して荷振れを抑制できるクレーンの制御装置を提供する。
【解決手段】起伏自在のブーム14と、ブーム14の先端からワイヤ16によって吊り下げられるフック17と、を備えるクレーンの制御装置Sである。
さらに、ブーム14の姿勢を検出するブーム姿勢検出手段31,32,33,34と、ワイヤ16のブーム14の先端からの振れ角θ1,θ2を検出する振れ角検出手段2と、ワイヤ16の張力を検出するワイヤ張力検出手段35と、計測されたワイヤ16の張力に基づき開始指令手段から指示を受けてワイヤ16を緊張させるだけの所定の緊張張力を与えるウインチ制御手段53と、を備えている。
そして、吊り荷を地切りする際又は着地する際には、緊張張力を与えた状態で計測されたブーム14の姿勢及びワイヤ16の振れ角θ1,θ2に基づいてブーム14の先端を吊り荷の直上に移動させる移動制御手段54を備えている。
(もっと読む)
クレーン
【課題】ジブの後方転倒を防止しつつ荷振れを低減できるクレーンを提供する。
【解決手段】ブーム2と、ブーム2の先端に起伏可能に取付けられるジブ3と、前方に傾斜したジブ3を後方に引き起こすようにして保持する保持ワイヤ41と、ブーム2とジブ3に架け渡されてジブ3を前方に駆動する転倒防止手段5と、を有するクレーン1である。
そして、保持ワイヤ41の張力Tが所定の転倒許容張力T1よりも小さくなる転倒危険領域では、転倒防止手段5は張力Tの不足分を補う力でジブ3を駆動して、張力Tを転倒許容張力T1と略一致させる。
(もっと読む)
クレーン
【課題】ジブの後方転倒を防止しつつ荷振れを低減できるクレーンを提供する。
【解決手段】ブーム2と、ブーム2の先端に起伏可能に取付けられるジブ3と、前方に傾斜したジブ3を後方に引き起こすようにして保持する保持ワイヤ41と、ブーム2とジブ3に架け渡されてジブ3を前方に駆動する転倒防止シリンダ5と、を有するクレーン1である。
そして、保持ワイヤ41の張力Tが減少して所定の許容張力T1になった場合に、転倒防止シリンダ5の加圧時に倒伏させる側となる油圧室52を加圧して保持ワイヤ41の張力Tを所定の安定張力TAにしたうえで、転倒防止シリンダ5の油圧室52からの排油経路が封止される。
(もっと読む)
クレーンのジブ煽り防止装置の制御方法及び装置
【課題】吊荷によるジブの撓みに伴う外乱の影響を考慮しつつ、作業中においても強風によってジブが後方へ煽られることを確実に防止し得、風に対するクレーンの安定性向上を図り得るクレーンのジブ煽り防止装置の制御方法及び装置を提供する。
【解決手段】ジブ5を倒伏させる方向へ付勢可能な付勢ウインチ22と、前記ジブ5による作業半径Rを検出する作業半径計30と、前記ジブ5先端から吊り下げられる吊荷の荷重Wを検出する吊荷荷重計31と、前記作業半径計30で検出される作業半径R並びに前記吊荷荷重計31で検出される荷重Wとに基づき前記付勢ウインチ22の付勢モータ22c及び付勢ブレーキ22dへ制御信号A,Bを出力する制御手段40とを備える。
(もっと読む)
建設機械
【課題】本体側ゲートとキャブ側ゲートとが確実に閉扉した状態において、キャブ移動装置によってキャブを安全に移動させる。
【解決手段】本体側ゲート検出スイッチ25によって本体側ゲート23の可動ゲート23Cが閉扉位置にあることを検出し、かつ、キャブ側ゲート検出スイッチ29によってキャブ側ゲート27の可動ゲート27Cが閉扉位置にあることを検出したときに、キャブ移動制御回路がキャブ移動装置18の作動を許す構成とする。これにより、本体側ゲート23の可動ゲート23Cとキャブ側ゲート27の可動ゲート27Cのうち少なくとも一方が開扉しているときは、キャブ移動装置18の作動を禁止することができ、例えばオペレータ以外の作業者が本体側ステップ19とキャブ側ステップ22との間を移動するときに、オペレータが誤ってキャブ21を移動させてしまうのを防止することができる。
(もっと読む)
建設機械の干渉防止装置
【課題】2台の建設機械を並設して作業を行う場合、能率良く作業を行うことができ、かつ作業用アタッチメントどうしの干渉を確実に防止しうる建設機械の干渉装置を提供する。
【解決手段】各建設機械の作業用アタッチメントの旋回位置をそれぞれセンサ素子38a〜38d等の旋回位置検出手段により検出する。旋回範囲設定手段により、相手側建設機械の反対側において、左右両方向の旋回動作を許容し、旋回許容範囲から旋回終点を超えると旋回許容範囲側へ復帰する旋回動作のみ許容する。減速範囲設定手段は各旋回許容範囲の両端の2つの旋回終点の手前にそれぞれ減速範囲を設定する。旋回方向検出手段により出力される旋回方向について、旋回位置検出手段により検出される旋回位置が減速範囲に至ると旋回モータを減速させる。減速旋回中に旋回位置検出手段により旋回終点が検出されると、旋回停止手段により旋回モータを停止する。
(もっと読む)
エンジン制御装置
【課題】本発明は、エンジン停止手段によるエンジンの停止により作業効率が低下することを抑制できるエンジン制御装置を提供する。
【解決手段】エンジン2を搭載する建設機械100に設けられるエンジン制御装置1であって、予め設定された条件を満たしたときに、エンジン2を停止するエンジン停止手段11と、建設機械100の姿勢に基づいて、エンジン停止手段11によるエンジン2の停止を制限する制限手段12と、を備える。この制限手段11は、例えば、上部本体102と下部本体101とが結合されていないときは、エンジン停止手段11によるエンジン2の停止を制限する。
(もっと読む)
41 - 50 / 134
[ Back to top ]