
国際特許分類[G01S5/02]の内容
物理学 (1,541,580) | 測定;試験 (294,940) | 無線による方位測定;無線による航行;電波の使用による距離または速度の決定;電波の反射または再輻射を用いる位置測定または存在探知;その他の波を用いる類似の装置 (17,599) | 2またはそれ以上の方向線,位置線測定を座標づけすることによる位置決定;2またはそれ以上の距離測定を座標づけすることによる位置決定 (2,996) | 電波を使用するもの[1,2010.01] (2,630)
国際特許分類[G01S5/02]の下位に属する分類
電波源の位置が離れて設けられた複数個の方向探知機により測定されるもの (73)
電波源の位置が,路程差測定によって決定される複数の位置線を座標づけすることによって決定されるもの (174)
単一の方向探知機の位置が互に離れている複数個の既知位置の電波源の方向の測定により決定されるもの (22)
受信機の位置が,路程差測定によって決定される複数の位置線を座標づけすることによって決定されるもの (50)
相異なる形の位置線,例.双曲線,円線,楕円線または放射状線,の座標づけによるもの (88)
互いに離れた複数個の既知位置の点からの絶対距離の測定によるもの (1,802)
国際特許分類[G01S5/02]に分類される特許
91 - 100 / 421
表示装置、情報処理装置、及び表示システム

【課題】簡易な処理により、無線端末に対して通信を許可する。
【解決手段】表示装置は、表示画面に画像を表示する表示手段と、通信を行う通信手段と、無線端末の位置を検出する位置検出手段と、前記位置検出手段により検出された前記無線端末の位置に従って、前記無線端末が前記表示画面に接触したか否かを判別する判別手段と、前記無線端末が前記表示画面に接触したと前記判別手段により判別された場合、前記通信手段による前記無線端末との間の通信を許可する制御手段とを備えている。
(もっと読む)
方位角推定装置、方法及びプログラム

【課題】方位角計測センサを用いずに、位置計測センサの計測値のみから、方位角を推定する。
【解決手段】時刻ステップt−1において方位角Φs(t−1)の対象物が行動a(t−1)を取ったときに、時刻ステップt−1において(Zxa(t−1),Zya(t−1))に位置し、時刻ステップtにおいて(Zxa(t),Zya(t))に位置する確率P(Zxa(t),Zya(t),Zxa(t−1),Zya(t−1)|Φs(t−1),a(t−1))を用いて、Bel(Φs(t−1))=P(Zxa(t),Zya(t),Zxa(t−1),Zya(t−1)|Φs(t−1),a(t−1))・Bel0(Φs(t−1))の関係を満たす、時刻ステップt−1において対象物の方位角がΦs(t−1)である更新後確率Bel(Φs(t−1))を計測更新部18が計算する。
(もっと読む)
位置特定システム
【課題】起点信号発信手段の位置を高精度で特定できる位置特定システムを安価に実現する。
【解決手段】起点信号を含む無線信号を、バースト信号として、間欠するための起点信号発信手段101と、起点信号を含む無線信号を、同一周波数を用いて、時分割であり、割付けられたタイムスロットで中継しあるいは再発信する複数の中継手段102a〜102dと、起点信号発信手段101、複数の中継手段102a〜102d、あるいはこれらの両方から無線信号を受信して位置を特定するための位置特定手段103とから構成される。
(もっと読む)
参照位置に対する位置の対応を決定するための装置および方法
参照位置(24)に対する位置(21)の対応を決定するための装置(30)であって、固定の無線送信機(22)の無線信号をその位置で受信できることを特徴とし、特定の無線送信機(22e)の識別子を決定するための、そして、第1の時刻(t1)にその特定の無線送信機の無線信号の信号特性を決定するための手段(32)であって、特定の無線送信機の識別子および無線信号の信号特性が、位置(21)のための測定パケット(MP)の少なくとも一部を示すことを特徴とする手段(32)と、位置(21)のための後処理された測定パケット(MP’)を得るために、測定パケット(MP)を後処理するための手段(36)であって、後処理するための手段は、第1の時刻(t1)が、特定の無線送信機(22e)の識別子が決定できた第2の時刻(t2)の前の最後の時間であって、そして、0.5秒以上の第1の時間(Δt)が、第1の時刻と第2の時刻の間にあり、その間特定の無線送信機(22e)の識別子を決定できない、第1の時刻(t1)から第1の時刻(t1)の後の第2の時刻(t2)までの間、特定の無線送信機(22e)の信号特性を少なくとも一時的に合成するために実行されることを特徴とする手段(36)と、対応を決定するために、参照位置(24)のための少なくとも1つの前に決定された参照測定パケット(RP)と、後処理された測定パケット(MP’)を比較するための手段(38)とを含むことを特徴とする装置(30)。 (もっと読む)
無線通信システムにおける測位のための基準信号送受信方法及び装置
【課題】無線通信システムにおける測位のための基準信号送受信方法及び装置を提供する。
【解決手段】基地局は、複数のスーパーフレームの各々を構成するフレームの中で2番目のフレームにプライマリーアドバンスト(PA)プリアンブルを配置し、1番目及び3番目のフレームの1番目のシンボルにセカンダリーアドバンスト(SA)プリアンブルを配置し、位置基盤サービス(LBS)区間に属する複数の連続した第1のスーパーフレームを決定し、第1のスーパーフレームの各々を構成するフレームの中で最後のフレームの1番目のサブフレームの1番目のシンボルに位置基盤サービスのための基準信号を含め、送信するデータが存在する場合、第1のスーパーフレームを除いた第2のスーパーフレームの各々を構成するフレームの中で最後のフレームの1番目のサブフレームの1番目のシンボルに前記データを含め、第1及び第2のスーパーフレームを用いて端末と通信する。
(もっと読む)
移動体追跡システム
【課題】移動体が存在する施設領域を正しく検知して正確な動線(移動履歴)を作成する移動体追跡システムを得る。
【解決手段】移動体を検知した受信機20が送信する移動体検知情報21を追跡サーバ30の受信部31が受信する。移動判定部32が、移動体検知情報21から生成した受信移動点から動線情報保持部40が保持する動線情報に含まれる最新移動点までの施設経路に沿った接続距離を、施設の経路に沿って受信機間の接続関係を定義した受信機配置情報より求め、この接続距離と両移動点間の検知時刻差より同一移動体が両移動点間を移動可能であるか判定する。動線作成部33が、移動可能と判定された受信移動点を動線情報に追加する。
(もっと読む)
位置探索装置および位置探索方法
【課題】電波特性取得装置の数を増やすことなく、電波発信装置の測位の精度を向上させる位置検索装置および位置探索方法を提供する。
【解決手段】位置探索装置が移動体に搭載されて移動されることにより、当該移動体の移動経路において前記電波特性取得装置により検出される前記電波特性情報と、当該電波特性情報を検出した際に前記位置取得装置によって検出される前記位置情報とに基づき、前記推定位置情報を算出する。
(もっと読む)
伝播特性に基づいたスポットのカテゴリー分け
複数のスポットの種類を定義および決定することと、複数のスポットをそのようなスポットに関連する信号伝播特性に少なくとも部分的に基づいてカテゴリー分けすることとに関連する1つまたは複数のプロセスまたはオペレーションを容易にするまたはそうでなければサポートするために利用され得る例示的な方法、装置、または製品が、本明細書において開示される。 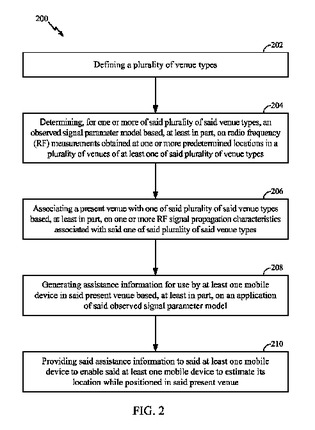 (もっと読む)
(もっと読む)
位置推定システム及び位置推定方法
【課題】送信装置から無線信号を送信し、無線信号の受信レベルを複数地点で観測することによって送信装置の位置を推定する位置推定システムにおいて、推定精度を向上し、また、演算処理の軽減を図る。
【解決手段】受信装置12_11〜12_MNMは、送信装置11からの無線信号を受信し、その受信レベルを複数地点で観測する。平均化部131は、無線信号の波長の1倍以上の範囲の観測点を受信群とし、各観測点で観測された受群毎の観測点の平均化位置情報とを用いて、送信装置11の位置を推定する。波長の1倍以上の範囲で受信レベルの平均化を行うと、伝搬減衰の瞬時変動の項が0dBとなり、受信レベル間の相関が0となる。これにより、レイリー分布のばらつきや、受信レベルの相関信レベルを平均化する。送信位置推定部132は、受信群毎の平均化受信レベルと、受信性による推定精度の低下を防げる。
(もっと読む)
位置算出装置、位置算出方法及び位置算出プログラム
【課題】 局所領域ごとに算出された位置座標を1つの座標系に統合する。
【解決手段】 位置算出装置20の局所座標算出部230は、それぞれ複数のセンサから構成される複数の局所領域を検出し、各センサと送受信端末10との間の距離に基づいて、局所領域それぞれにおいて、当該局所領域を構成する複数のセンサの位置座標を算出する。統合領域抽出部241は、複数の局所領域のうち、所定数のセンサを共有する2つ以上の局所領域を、互いに統合可能な領域として抽出する。統合処理部242は、抽出された局所領域それぞれにおいて、センサ間距離及びセンサ間距離の信頼度を算出し、センサ間距離の信頼度によって重み付けを行なって重み付け補正後のセンサ間距離を算出し、前記重み付け補正後のセンサ間距離の加重平均に基づいて、局所領域を統合した座標系における各センサの位置座標を算出する。
(もっと読む)
91 - 100 / 421
[ Back to top ]