
国際特許分類[G01S5/02]の内容
物理学 (1,541,580) | 測定;試験 (294,940) | 無線による方位測定;無線による航行;電波の使用による距離または速度の決定;電波の反射または再輻射を用いる位置測定または存在探知;その他の波を用いる類似の装置 (17,599) | 2またはそれ以上の方向線,位置線測定を座標づけすることによる位置決定;2またはそれ以上の距離測定を座標づけすることによる位置決定 (2,996) | 電波を使用するもの[1,2010.01] (2,630)
国際特許分類[G01S5/02]の下位に属する分類
電波源の位置が離れて設けられた複数個の方向探知機により測定されるもの (73)
電波源の位置が,路程差測定によって決定される複数の位置線を座標づけすることによって決定されるもの (174)
単一の方向探知機の位置が互に離れている複数個の既知位置の電波源の方向の測定により決定されるもの (22)
受信機の位置が,路程差測定によって決定される複数の位置線を座標づけすることによって決定されるもの (50)
相異なる形の位置線,例.双曲線,円線,楕円線または放射状線,の座標づけによるもの (88)
互いに離れた複数個の既知位置の点からの絶対距離の測定によるもの (1,802)
国際特許分類[G01S5/02]に分類される特許
121 - 130 / 421
表示装置を備えるシステム、端末及び表示装置の検索方法
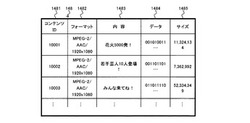
【課題】端末との距離及び画面の向きの関係に基づいて、利用者が視聴している表示装置を検索する方法を提供する。
【解決手段】コンテンツを表示する表示画面を備える表示装置と、前記表示装置を管理する検索装置と、を備えるシステムにおいて、前記検索装置は、前記表示装置の位置、前記表示画面の法線ベクトル、前記表示装置へアクセスするための情報を含む表示装置情報を管理し、端末の位置及び当該端末の向きを示す方向ベクトルを含む位置情報を前記端末から受信した後に、前記表示装置情報を参照して、前記位置情報を送信した端末と前記表示装置情報によって示される表示装置との距離、及び、前記方向ベクトルと前記法線ベクトルとの角度を計算し、前記計算された距離及び角度に基づいて尤度を計算する。
(もっと読む)
受動分散要素の存在下でのポジショニング
受動分散要素に対するポジショニング基準信号(PRS)の異なる送信を容易にするシステムおよび方法について説明する。受動分散要素のためのPRSは、さまざまなシンボル系列などを使用して、関係するアクセスポイントにおいてPRSのために利用されるリソースと異なるリソースを介して送信することができる。この点について、ワイヤレスデバイスは、アクセスポイントからのPRSと受動分散要素からのPRSを区別でき、これによって、ポジション決定などの、このようなRSに関わる処理の混乱を軽減することができる。あるいは、受動分散要素はPRSの送信を抑制でき、対応するアクセスポイントは、ワイヤレスデバイスに、PRSに基づいてポジショニングを決定することのみを指示することができる。したがって、ワイヤレスデバイスは、ポジションを決定するために、アクセスポイントから送信されたPRSを利用する(および受動分散要素から送信された他の基準信号は利用しない)ことができる。 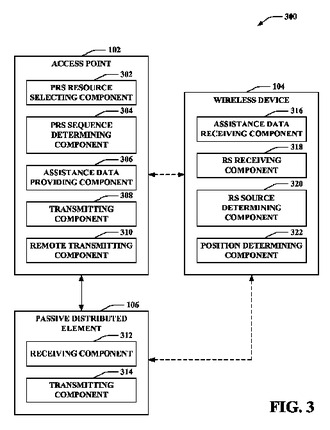 (もっと読む)
(もっと読む)
セルラネットワークにおける測位支援方法及び装置
本発明は、最少の支援データ信号通知による測位支援方法及びデバイスに関する。位置測定を実行する無線デバイスにおける方法は、セル識別子及びセル識別子と測位基準信号パターン間の予め定義された対応付けに基づき測位基準信号パターンを決定するステップ(440)と、決定する測位基準信号パターンに基づき位置測定を実行するステップ(450)と、を含む。 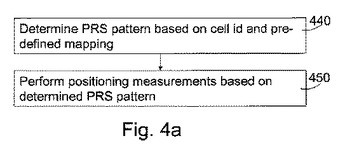 (もっと読む)
(もっと読む)
携帯機の車内外判定用テーブルの作成方法

【課題】精度の高い車内外判定を実現可能な携帯機の車内外判定用テーブルを提供すること。
【解決手段】各アンテナで測定された測定データを3次元デカルト座標系の各軸に割り当て、測定データのxy平面への射影データから車内側データの3次元近似曲線を求め、この3次元近似曲線を用いて所要の密度となるように車内側データを補填する。次に、所要の密度となるようにデータ補填した車内側データから任意のz軸方位置でのデータを取り出してxy平面へ射影し、射影データから当該z軸方向位置での車内側データの包絡線を求め、z軸方位置を順次シフトさせて各z軸方向位置での車内側データの包絡線をそれぞれ求め、z軸方向の各位置での車内側データの包絡線の集合から3次元デカルト座標系における車内側データの包絡面を用いて車内外判定用テーブルを構築する。
(もっと読む)
無線通信システムにおける環境評価
無線通信システムを取り巻き、送信信号を変曲させる少なくとも一つのインフレクタを含む環境を評価する方法及びシステムが記載される。観測発生装置(300)は、送信機から受信機へ無線通信チャネルを介して送信した入力信号を受信し、また受信機、送信機及びインフレクタの少なくとも一つに関連するシステム状態情報を受信する。観測プロセッサ(302)は、観測発生装置(300)からの観測(303)を使用して、受信した入力信号及びシステム状態情報に基づいてインフレクタの少なくとも一つの特性を評価する。 (もっと読む)
測定を促進する通信方法および装置
不連続モードで動作可能な無線端末(30)、およびそのような無線端末(30)を動作させる方法によって、無線端末(30)の位置に関係する測定を促進する。本方法は、無線アクセスネットワーク(20)からメッセージを受信する工程を含む。測定要求メッセージは、基地局から送信されるダウンリンク信号について無線端末が測定を行うか、または無線端末から送信されるアップリンク信号について基地局が測定を行うことを知らせるように設定される。本方法は、当該メッセージの受信の結果として、または当該メッセージの受信後に、不連続モードから、測定の動作を促進するための修正モードに、無線端末(30)の動作を変更する工程をさらに含む。不連続モードと比べて、修正モードでは、(i)非受信期間および(ii)非送信期間のうちの少なくとも1つが短縮または削除される。「不連続モードから修正モードへの変更」には、(1)無線端末のモードの変更(例えば、(不連続受信(DRX)または不連続送信(DTX)等の)不連続モードから連続送信モードへの変更)と、(2)不連続モード(第1の不連続モード)から修正不連続モード(第2の不連続モード)への変更とのうちの1つ以上が含まれる。  (もっと読む)
(もっと読む)
無線電話ネットワークの移動局のジオロケーション
移動局が動作する無線電話セルラネットワークによってカバーされる所定エリア内の移動局を位置決めする方法に関する。当該方法は、ネットワークの少なくとも7個の異なる通信チャネルに関する受信電力(PLx)を測定するために移動局を使用する工程(ステップ200)と、当該測定と、チャネルに関する受信電力レベルとカバーエリア内の位置との間の対応の関連所定情報と、に従って当該移動局を位置決めする(ステップ210)工程とを備える。当該所定情報は、異なる位置(Li)でチャネルに関して前もって測定され、データベース(BD1)に格納された電力レベル(PLiMj)を含み得、その場合移動局は、測定(PLx)と、データベース(BD1)のコンテンツとを比較することによって位置決めされる。当該方法によれば建物内であってもより良好な精度での位置決めが可能になる。  (もっと読む)
(もっと読む)
支援データの非準拠の使用を伴うモバイルベースの測位
ワイヤレス通信システムにおいてモバイルベースの測位を実行するための装置および方法が提示される。位置推定が、第1の測位方法向けに意図されている支援データに基づいて計算される。モバイルデバイスは、第2の測位方法がネットワークによって明確にサポートされているか否かを無視し、第2の測位方法と、ネットワークによってサポートされるとともに、第2の測位方法とは異なる第1の測位方法向けに意図されている支援データのサブセットとを使用して、位置推定を計算する。 (もっと読む)
端末位置推定方法、測位データ処理方法、プロセッサ及びコンピュータ読み取り可能な媒体
少なくとも1つの固定ノードを有する無線ネットワークのカバレッジエリア内の端末の位置を推定する方法は、端末と固定ノードの何れかとの間の無線チャネルの複素周波数応答を測定し、測定された複素周波数応答の第1メトリックを表現するデータと、複数の保存されているメトリックを表現するデータとを比較することに少なくとも基づいて、端末の位置を推定するステップを有し、複数の保存されているメトリックの各々は、無線ネットワーク内の複数の異なる位置の何れかに関連し、保存されているメトリックの各々は、固定ノードの何れかとメトリックが関連している無線ネットワーク内の位置との間で測定された複素周波数応答である。 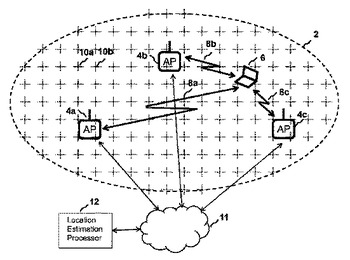 (もっと読む)
(もっと読む)
位置推定システム
【課題】マルチパスの影響を受けることなく、また赤外線投光部や赤外線受光部を設けることなく、高精度に移動体の現在位置を推定する。
【解決手段】位置推定対象エリア1を小区画に区切ったセルCL毎にタグ受信機3および人感センサ4を設ける。人Xに無線タグTGXを所持させ、人Yに無線タグTGYを所持させる。無線タグTGX,TGYは識別情報IDX,IDYが付された電波を発する。人感センサ4が検出するセルCL毎の人の在不在を示す情報を位置推定装置2へ送る。タグ受信機3で検出される識別情報が付された電波の強度を位置推定装置2へ送る。位置推定装置2は、人感センサ4が検出するセルCL毎の人の在不在の検出結果をマップA、タグ受信機3が検出するセルCL毎の同一の識別情報が付された電波の強度をマップB、マップAとマップBのセルCL毎のアンド情報をマップCとし、マップA,B,Cを用いて、位置推定対象エリア1に位置する人X,人Yの現在位置を推定する。
(もっと読む)
121 - 130 / 421
[ Back to top ]