
国際特許分類[G01S5/02]の内容
物理学 (1,541,580) | 測定;試験 (294,940) | 無線による方位測定;無線による航行;電波の使用による距離または速度の決定;電波の反射または再輻射を用いる位置測定または存在探知;その他の波を用いる類似の装置 (17,599) | 2またはそれ以上の方向線,位置線測定を座標づけすることによる位置決定;2またはそれ以上の距離測定を座標づけすることによる位置決定 (2,996) | 電波を使用するもの[1,2010.01] (2,630)
国際特許分類[G01S5/02]の下位に属する分類
電波源の位置が離れて設けられた複数個の方向探知機により測定されるもの (73)
電波源の位置が,路程差測定によって決定される複数の位置線を座標づけすることによって決定されるもの (174)
単一の方向探知機の位置が互に離れている複数個の既知位置の電波源の方向の測定により決定されるもの (22)
受信機の位置が,路程差測定によって決定される複数の位置線を座標づけすることによって決定されるもの (50)
相異なる形の位置線,例.双曲線,円線,楕円線または放射状線,の座標づけによるもの (88)
互いに離れた複数個の既知位置の点からの絶対距離の測定によるもの (1,802)
国際特許分類[G01S5/02]に分類される特許
141 - 150 / 421
位置情報決定方法および装置
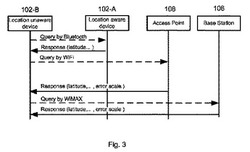
複数の電子機器を含む通信システムの電子機器で利用される位置情報を決定する方法であって、前記通信システムの複数の通信ネットワークを介して位置要求信号を送信するステップと、前記複数の電子機器の少なくとも1つの電子機器からそれぞれの位置情報を伴う位置応答信号を受信するステップと、受信した前記位置応答信号により前記電子機器の位置情報を決定するステップと、を有しており、前記位置要求信号は、前記電子機器の前記位置情報が前記位置応答信号に基づいて決定されるまで、前記ネットワーク間における特定の順序で前記複数のネットワークに連続的に送信される。 (もっと読む)
位置情報システム

【課題】
測位用識別情報を送信する測位情報送信装置と、測位用識別情報を位置情報へと変換する測位情報管理サーバからなる位置情報システムにおいて、
システム普及に向けたコストシェアリングの仕組みのため、測位情報送信装置のIDを秘匿・可変化し送信する。
この時、測位情報送信装置の装置IDのビット長が短い場合にも運用可能な方法が望まれる。
【解決手段】
屋内測位システムにおいて、コストシェアリングの仕組みを確立するために、測位情報送信装置は位置情報を直接送信せずに、装置IDを秘匿・可変化した後、送信し、測位情報管理サーバは装置IDと位置情報の関連付けを格納管理し、該関連付けに従い装置IDから位置情報への変換を実行する。さらに測位情報送信装置が測位用識別情報を秘匿化する際に全ての測位情報送信装置が同じ秘密鍵を使用することで秘匿化されたIDの衝突問題を解決し、装置IDのビット長が短い場合にも運用が可能となる。
(もっと読む)
フィンガープリント法を用いた位置検出システム及び位置検出方法
フィンガープリンティング法による位置検出システム及び方法であって:複数のフィールドデバイスと一つのターゲットデバイスとに関連する領域の中の複数のノードを定義する段階と;前記複数のノードにおける前記フィールドデバイスからの予測信号強度を決定する段階であって、特定のノードにおけるそれぞれの予測信号強度は、前記フィールドデバイスの一つと関連する、段階と;前記ターゲットデバイスと通信する前記フィールドデバイスのそれぞれのための、前記ターゲットデバイスにおける前記フィールドデバイスからの実信号強度を測定する段階であって、それぞれの実信号強度は前記フィールドデバイスの一つと関連する、段階と;特定のフィールドデバイスの実信号強度より大きいか又は等しい、特定のフィールドデバイスの予測信号強度を有する前記ノードを有効なノードとして指定する段階と;前記有効なノードのうち、前記フィールドデバイスの実信号強度が、前記フィールドデバイスの予測信号強度と一致する、少なくとも一つの有効なノードを決定する段階と;を有する。  (もっと読む)
(もっと読む)
所在管理システム
【課題】置場に設置された複数のICタグを検出してしまった場合においても、管理対象部品と置場とを的確に関連付けることにある。
【解決手段】管理対象部品Aに取り付けられた物品ICタグ10と、管理対象部品Aを保管する置場1,2に設置された場所ICタグ10と、物品ICタグ10及び場所ICタグ10を読み取るICタグリーダ12とからなり、置場1,2を巡回する際にICタグリーダ12により複数の場所ICタグ10が読み取られた場合には、物品ICタグ10に関する受信強度と受信経過時間とのグラフと、場所ICタグ10に関する受信強度と受信経過時間とのグラフとの重なり面積の大きい方の場所ICタグ10が設置された置場1又は2に管理対象部品Aは保管されていると判断するので、複数の場所ICタグ10を検出してしまった場合においても、管理対象部品Aと置場1又は2とを的確に関連付けることができる。
(もっと読む)
測位システム
【課題】高精度の測位ができ、かつ大きな情報量の識別子を伝達でき、さらに低コストで構築することができる測位システムを提供すること。
【解決手段】タグ1は、自タグのID情報を電波信号により送信し、該電波信号と同時または一定時間差で光点滅信号を送信する。リーダ装置の電波信号受信機3は、電子タグ1からの電波信号を受信する。カメラ2-1,2-2は、電子タグ1が存在する領域を撮影する。位置算出装置4は、カメラ画像における光点滅信号の位置から電子タグ1の位置を算出するとともに、光点滅信号と電波信号が受信されるタイミングの関係から、電子タグ1の位置に電波信号のID情報を対応付ける。
(もっと読む)
測位統合装置、位置情報サービスシステム及び位置情報サービス方法
【課題】屋内の測位手段を乗り継いで利用する。
【解決手段】端末装置と、測位統合装置と、を備える位置情報サービスシステムであって、前記測位統合装置は、移動体端末の位置を示す複数の座標系に基づく複数の座標値を保持し、前記各座標系に基づく座標値を所定の統一座標系に基づく座標値に変換するための変換パラメータを保持し、前記複数の座標値の一つを選択し、前記選択された座標値を、前記変換パラメータを用いて前記統一座標系に基づく座標値に変換する。
(もっと読む)
位置推定システム
【課題】位置情報とその位置での複数の無線基地局からの伝搬特性情報とを対応付けて保存した基準データベースを用いて位置推定を行う位置推定システムで、推定精度の向上を図れると共に、基準データベースの位置情報の構築を容易化できるようにする。
【解決手段】基準データ測定装置200は、異なる周波数の電磁波を送信する複数種類の無線システムの基地局群101、102の信号を受信し、その伝搬情報を検出して、サーバ装置300の基準データベース320に蓄積する。位置推定を行う場合には、無線端末400は、無線システムの基地局群101、102の信号を受信し、その伝搬情報を検出してサーバ装置300に送る。サーバ装置300で、基準データデータベース320を用いて位置を推定する。異なる複数の伝搬特性を反映したデータの取得が可能となり、精度の向上が図れる
(もっと読む)
位置推定装置、無線端末、位置推定システム
【課題】少ない演算量でターゲット端末の位置を推定することのできる位置推定装置を得る。
【解決手段】無線端末100の位置を推定するための基準となるアンカー端末200が存在する環境下における無線端末100の位置を推定する装置であって、無線端末100とアンカー端末200の間の端末間距離に応じて変化する状態値を表す情報を受信する受信部と、受信部が受信した情報に基づき無線端末100の位置を推定する位置推定部450と、を備え、位置推定部450は、状態値が特定の値であると仮定した場合における端末間距離の確率密度関数p(r|P)を算出し、確率密度関数p(r|P)の確率値が最大となる端末間距離を特定し、その端末間距離を用いて無線端末100の位置を推定する。
(もっと読む)
無線チャネルの状態を推定する方法
【課題】低い複雑度と低コストで、無線チャネルの状態を推定する。
【解決手段】方法は、レンジング信号を送信してから無線ネットワークのチャネルを介して該レンジング信号を受信するまでの時間、および該レンジング信号の受信信号強度(RSS)を測定する。この時間に基づいて距離を推定し、このRSSに基づいて経路損失を推定する。この距離およびこの経路損失に基づいてチャネルの状態の確率を推定する。この状態は見通し(LOS)または見通し外(NLOS)のうちの一方にある。
(もっと読む)
車両用通信装置
【課題】比較的短い距離内で異常な動きを伴わない車両の位置情報の誤りであっても検出できる車両用通信装置を提供する。
【解決手段】要請フレームで特定される送信フレームに含まれた他車両の位置、その送信フレームを受信した自車両の位置及びその送信フレームが到来した方向を読み出し(S305)、自車両の受信位置及び他車両の位置を結んだ直線と、その送信フレームが到来した方向とがなす角が予め定められた設定値よりも大きいか否かを判断し(S308)、設定値よりも大きければ(S308:YES)、応答フレームの「位置詐称」フラグを「1」として、応答フレームをブロードキャスト通信により周辺の他車両に送信する(S309)。
(もっと読む)
141 - 150 / 421
[ Back to top ]