
後側方操舵支援技術
【課題】車両周辺の物体について、運転者に気付かせる役割を果たす警報と、回避のために運転者の運転操作を支援するための操作支援とを、運転者に違和感を生じさせないようシームレスに組み合わせる。
【解決手段】後側方など車両周辺に存在する物体を検出し、該物体までの距離を算出すると共に、該物体の相対速度を算出し、車両が物体に到達するまでの余裕時間を算出する。車両には、制御信号をステアリングアクチュエータに印加して操舵を補助する手段が備えられ、上記の距離、相対速度、余裕時間の少なくとも1つに応じて、パルス状の信号を生成し、該パルス状の信号を前記制御信号に重畳して、該重畳された制御信号が、前記ステアリングアクチュエータに印加されるようにする。相対速度が大きくなるほどパルスの周波数を高く、そして、前記距離または余裕時間が小さくなるほど、該パルスのデューティ比が大きくなるように該信号を生成する。
【解決手段】後側方など車両周辺に存在する物体を検出し、該物体までの距離を算出すると共に、該物体の相対速度を算出し、車両が物体に到達するまでの余裕時間を算出する。車両には、制御信号をステアリングアクチュエータに印加して操舵を補助する手段が備えられ、上記の距離、相対速度、余裕時間の少なくとも1つに応じて、パルス状の信号を生成し、該パルス状の信号を前記制御信号に重畳して、該重畳された制御信号が、前記ステアリングアクチュエータに印加されるようにする。相対速度が大きくなるほどパルスの周波数を高く、そして、前記距離または余裕時間が小さくなるほど、該パルスのデューティ比が大きくなるように該信号を生成する。
【発明の詳細な説明】
【技術分野】
【0001】
この発明は、車両周辺の物体を回避すべく、車両の運転者の操舵を支援するための装置に関する。
【背景技術】
【0002】
従来、後側方の死角を支援するものとしてミラーが車両に設けられており、また、最近においては、車両に取り付けられたレーダやカメラなどで、外界の他の車両等の物体を検知して運転者に通知することが提案されている。運転者への通知だけでなく、たとえばブレーキ制御を介して、物体を回避するために車両の走行を制御することも提案されている。
【0003】
さらに、下記の特許文献には、車両を目標車線に車線変更する際に衝突を回避するための方法が記載されている。この方法では、車両の後側方にある物体を検出し、段階的な警報を行う。第1段階では、車線変更によって検出物体との前後間隔が安全な間隔より狭くなるであろう場合に光学的警報信号が出力される。第2段階では、警報に値する物体側に運転者が方向指示器のスイッチを入れると、音響的警報信号が出力される。第3段階では、検出物体と衝突する可能性がある目標車線への車線変更を開始したとの認識に応じて、触覚的警報信号が出力される。触覚的警報信号の出力は、操作モーメントをハンドルに加えることによって行われる。第4段階では、車線変更の開始が認識され、かつ目標車線上にある物体の潜在的危険度が大きい場合に、車両を車線に戻すための措置が実施される。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2008−531388号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
車両の周辺に、他の車両のような物体が検出された場合、状況に応じて、運転者の気付きのための警報を行うと共に、運転者の運転操作の支援を行うことが考えられる。警報と操作支援を組み合わせることで、より効果的に、運転者の物体に対する回避行動を支援することができる。
【0006】
しかしながら、従来の手法では、警報と操作支援を組み合わせる(つなげる)のに、運転者に違和感を生じさせるおそれがある。すなわち、事前に、音や振動子を用いて警報を行う場合、該警報段階では、運転者が気付かなかったり、気付いたとしてもどのような危険が迫っているのかを運転者が理解しにくい場合がある。そのため、運転者が、あるべき行動を起こす前に、システムによる回避のための操作支援が起動されてしまうおそれがある。これは、運転者が意図していない走行状態が開始される等、運転者に違和感を生じさせるおそれがある。たとえば、操作支援としてブレーキ制御を行うと、運転者の意思に反したブレーキ動作が突発的に生じるおそれがあり、運転者に違和感を生じさせやすい。
【0007】
したがって、本発明は、車両周辺の物体について、運転者に気付かせる役割を果たす警報と、回避のために運転者の運転操作を支援するための操作支援とを、運転者に違和感を生じさせないようシームレスに組み合わせる手法を提案する。
【課題を解決するための手段】
【0008】
この発明の一つの側面によると、車両周辺に存在する物体を検出する手段と、前記車両から前記物体までの距離を算出する手段と、前記物体の前記車両に対する相対速度を算出する手段と、前記車両が前記物体に到達するまでの余裕時間を算出する手段と、制御信号をステアリングアクチュエータに印加して、前記車両のステアリングホイールの操舵を補助する操舵補助手段と、を備える運転支援装置は、前記距離、前記相対速度、および前記余裕時間の少なくとも1つに応じて、パルス状の信号を生成する生成手段と、前記パルス状の信号を前記制御信号に重畳する手段と、を備え、前記パルス状の信号が重畳された制御信号が、前記ステアリングアクチュエータに印加され、前記生成手段は、前記相対速度が大きくなるほど、パルスの周波数が高くなると共に、前記距離または前記余裕時間が小さくなるほど、該パルスのデューティ比が大きくなるよう、前記パルス状の信号を生成する。
【0009】
この発明によれば、パルス状の信号を制御信号に重畳した上で、ステアリングアクチュエータに印加する。このようなパルスの印加は、該パルスの持続時間(パルスがオンの時間)に応じてハンドルを振動させることができるため、運転者に気付きを与えることができ、警報の役割を果たす。物体の相対速度が大きくなるほど切迫感が高まるが、これを、パルスの周波数すなわちハンドルが振動する頻度で運転者に知らせることができる。一方、該パルスのデューティ比を大きくするにつれて、該パルス状の信号は、一定振幅値を持つ信号の形態に近づいてゆく。そのため、ハンドルが振動している感覚は低減していき、アシスト量(操舵を補助する力)が常時低減された状態になっていく。距離または余裕時間が小さくなるほど、すなわち実際に物体に近づくほど、該パルスのデューティ比を大きくすることにより、物体の方へ近づかないような操作支援を実現することができる。
【0010】
このように、時々刻々と変化するリスクの状態(相対速度、距離、余裕時間により表される)を、同じ操舵補助手段を介して連続的に表現することができるので、警報と操作支援とをシームレスにつなげることができる。したがって、運転者に違和感を生じさせることなく、警報状態から操作支援状態へと運転者を誘導することができる。仮に、警報の段階で運転者の気付きが遅れても、気付いた時点で違和感なく回避行動につなげていくことができる。
【0011】
この発明の一実施形態によると、前記距離が小さいほど、前記パルス状の信号の振幅を大きくする。
【0012】
パルス状の信号の振幅を大きくし、この信号を制御信号に重畳することにより、物体の方向へ操舵しにくいようにアシスト量を低減することができる。したがって、車両が物体に実際に近づくにつれて、物体の方へ近づかないような操作支援を、より効果的に実現することができる。
【0013】
この発明の一実施形態によると、車両が現在の走行路から逸れる可能性を判定する手段を備え、該可能性が低いと判定された場合には、前記パルス状の信号の制御信号への重畳を禁止する。こうして、現在の走行路を走行している場合には、車線変更等による現在の走行路から逸れることに起因した物体との衝突は生じないため、警報および操作支援を抑制して、運転者のわずらわしさを軽減することができる。
【0014】
本発明のその他の特徴及び利点については、以下の詳細な説明から明らかである。
【図面の簡単な説明】
【0015】
【図1】この発明の一実施例に従う、車両の運転支援装置の構成を示すブロック図。
【図2】この発明の一実施例に従う、運転支援装置が適用されうる状況の一例を示す図。
【図3】この発明の一実施例に従う、パルス状信号の形態例を示す図。
【図4】この発明の一実施例に従う、車両のリスク状態を表すパラメータに応じて生成されるパルス状信号の一例を示す図。
【図5】この発明の一実施例に従う、運転支援プロセスのフローチャート。
【発明を実施するための形態】
【0016】
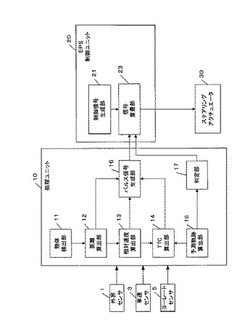
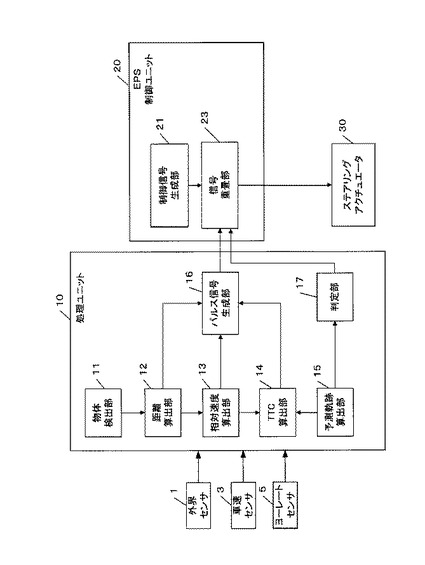
次に図面を参照してこの発明の実施の形態を説明する。図1は、この発明の一実施形態に従う、車両に搭載された運転支援装置の構成を示すブロック図である。
【0017】
外界センサ1は、車両周辺の所望の方向に存在する物体を検出するよう、車両の適切な場所に取り付けられる。この実施形態では、外界センサ1は、車両の左右側方(左右後側方でもよい)に存在する物体を検知するよう、車両の左右の側部(たとえば、ドアミラー近傍)に取り付けられている。
【0018】
外界センサ1は、たとえばミリ波やレーザなどの電磁波によるレーダ装置および(または)撮像装置を備えるよう構成されることができる。ここで、レーダ装置は、任意の既知の適切なレーダ装置で実現されることができる。レーダ装置は、たとえば、自車両の外界に設定された検出対象領域を走査するよう電磁波の発信信号を発信する。該発信信号が、自車両の外部の物体(たとえば、他車両や構造物など)によって反射されることで生じた反射信号を受信し、該物体までの距離および方位を示す信号を生成し、処理ユニット10に出力する。また、撮像装置は、任意の既知の適切な撮像装置で実現されることができる。撮像装置は、1または複数のカメラにより撮像された画像を取得し、該画像データを処理ユニット10に出力する。
【0019】
車速センサ3は、車両の走行速度(車速)を検出するセンサであり、ヨーレートセンサ5は、車両のヨーレートを検出するセンサであり、これらの検出値は、処理ユニット10に送られる。
【0020】
処理ユニット10およびEPS(電動パワーステアリング)制御ユニット20は、それぞれ、中央処理装置(CPU)およびメモリを備えるコンピュータである電子制御装置(ECU)に実現されることができる。図には、処理ユニット10およびEPS制御ユニット20によって実現される機能がブロックとして表されている。この実施形態では、処理ユニット10は、物体検出部11、距離算出部12、相対速度算出部13、TTC(余裕時間)算出部14、予測軌跡算出部15、パルス信号生成部16、および判定部17を備える。EPS制御ユニット20は、制御信号生成部21および信号重畳部23を備える。
【0021】
車両には、電動パワーステアリング機構が設けられており、該機構において、ステアリングアクチュエータ30は、その内部に含むモータにより、ステアリングホイールに結合されたステアリングシャフト(いずれも図示せず)を駆動する。該モータの出力トルクを制御することにより、ステアリング操作における補助操舵力(アシスト量)を制御することができる。
【0022】
具体的には、EPS制御ユニット20の制御信号生成部21が、ステアリングアクチュエータ30に送出するための制御信号を生成する。たとえば、車両の現在の操舵トルクおよび車速等に基づいてベース電流を算出し、該ベース電流を、たとえば現在のヨーレートに基づいて補正して目標電流を算出し、該目標電流が該モータに供給されるように、ステアリングアクチュエータ30に送出するための制御信号を生成することができる。これにより、目標電流に応じた補助操舵力を生成して、運転者による運転操作をアシストすることができる。
【0023】
上記の電動パワーステアリング機構および該機構中のステアリングアクチュエータ30を制御するための制御信号の生成は、既知の適切な手法により実現されることができ、たとえば、特開2007−283954号に一例が記載されている。
【0024】
この実施形態では、EPS制御ユニット20に信号重畳部23が設けられており、信号重畳部23は、処理ユニット10のパルス信号生成部16によって生成されたパルス状の信号を受け取り、これを、制御信号生成部21によって生成された制御信号に重畳する。重畳された制御信号が、ステアリングアクチュエータ30に印加される。
【0025】
該パルス状の信号の重畳により、前述したような、パルスの持続時間に応じてステアリングホイール(ハンドル)を振動させる警報状態から、ステアリングホイールのアシスト量を定常的に低減する操作支援状態へと、シームレスに移行させることができる。
【0026】
以下、処理ユニット10によって実行される、パルス状の信号の生成について、説明する。
【0027】
物体検出部11は、外界センサ1の出力信号から、車両の周辺に存在する物体を検出する。たとえば、他の車両を、物体として検出することができる。たとえば、前述したレーダ装置からの出力信号および撮像装置からの画像データに基づいて、既知の手法により、他の車両等の物体を検出することができる。
【0028】
距離算出部12は、物体検出部11によって検出された物体までの自車両からの距離(相対距離)を算出する。相対速度算出部13は、該検出された物体の速度と自車両の速度に基づいて、物体の自車両に対する相対速度を算出する。物体の速度は、外界センサ1によって該物体を時間的に追跡することにより算出することができる。自車両の速度は、車速センサ3により検出されることができる。
【0029】
予測軌跡算出部15は、車速センサ3によって検出された自車両の速度とヨーレートセンサ5によって検出された自車両のヨーレートに基づき、自車両の今後の軌跡を推定(予測)する。具体的には、予測軌跡算出部15は、検出されたヨーレートおよび車速から、車両の旋回半径を算出し、自車両の現在の進行方向に、該算出した旋回半径の円弧を連ねることにより、自車両の将来の走行軌跡を予測することができる。
【0030】
TTC算出部14は、自車両の物体に到達するまでの時間(衝突余裕時間(TTC:time to collision)と呼ばれる)を算出する。たとえば、予測軌跡算出部15によって算出された予測軌跡と、検出された物体が現在の速度および方向を維持して走行したと仮定した場合の軌跡との交点を求め、自車両が該交点に到達するまでの時間を、余裕時間TTCとして求めることができる。
【0031】
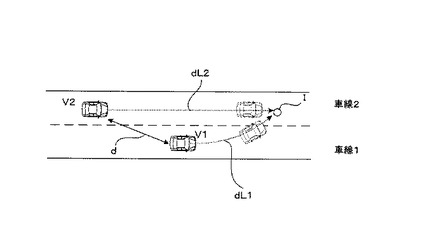
ここで図2を参照すると、本願発明が効果的に適用されうる、運転者の操舵(旋回)操作によって物体と衝突する可能性のある状況の一例が示されている。自車両V1が車線1を走行しており、他の車両V2が、車線1の隣にある車線2を走行している。自車両V1には、車両の左側方の物体を検出するよう外界センサ1が設けられており、よって、外界センサ1により、他の車両V2を検出することができる。これにより、他の車両V2への距離dおよび他の車両V2の相対速度veが算出される。
【0032】
車両V1は、車線1から車線2に車線変更する動作に入っており、予測軌跡算出部15は、前述したように、車両V1の車線2への軌跡を予測する。予測された軌跡が、点線dL1で示されている。他方、他の車両V2は、車線2を直進走行しており、点線dL2のように、軌跡が推定される。軌跡dL1とdL2の交点Iが算出され、車両V1の現在位置から交点Iまでの距離と、車両V1の現在の車速に基づいて、該交点Iに車両V1が到達するまでの時間TTCを算出することができる。代替的に、車両V1が、車線V2に侵入する地点までの時間を、余裕時間TTCとして算出するようにしてもよい。
【0033】
パルス信号生成部16は、前述したように、ステアリングアクチュエータ30を駆動する制御信号に重畳すべき信号を、算出された距離d、相対速度ve、余裕時間TTCのうちの1つまたは複数に基づいて、生成する。生成される信号は、パルス状の信号(パルス形状を有した信号の趣旨であり、以下、単にパルス信号と呼ぶことがある)である。
【0034】
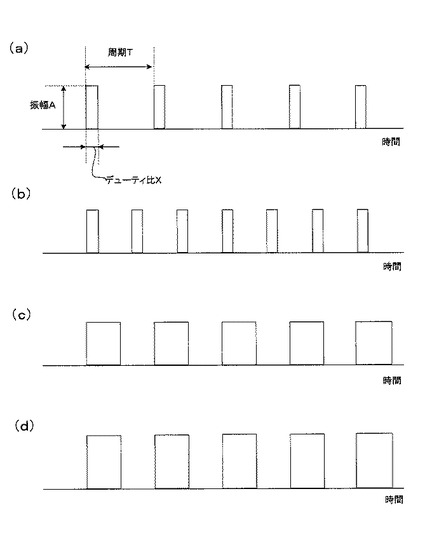
ここで、図3の(a)を参照すると、該パルス信号の所定の基準状態の一例が示されており、該信号は、周波数fすなわち周期Tを持ち、振幅がAであり、デューティ比(パルス幅の周期に対する比)がX(%)である。このように、パルス信号の形状を表すパラメータには、周波数(周期)、振幅、デューティ比の3つが存在する。
【0035】
図3の(b)〜(d)は、これらのパラメータの大きさを変化させたものであり、(b)は、(a)よりも周波数fが高く(周期Tが短く)なっており、他のパラメータ値は同じである。(c)は、(a)よりもデューティ比Xが大きくなっており、他のパラメータ値は同じである。
【0036】
(a)や(b)の状態は、比較的持続時間(パルス幅)の短いパルス(デューティ比が所定値(たとえば、50%)以下のパルス)が、定期的に出現する。これを、EPS制御ユニット20の信号重畳部23によって制御信号から減算すると、該パルスの持続時間に応じて、ステアリングホイールのアシスト量が瞬間的に減少するため、ハンドルを持つ運転者には、ハンドルに瞬間的な振動(ブルッというような振動)が生じているように感じる。したがって、このようなパルス信号の重畳により、運転者に警報を与えることができる。(b)のようにパルスの周波数を高めることにより、運転者の注意を、より強く喚起することができる。
【0037】
他方、(c)の状態は、比較的持続時間の長いパルス(デューティ比が所定値(たとえば、50%)以上のパルス)が、定期的に出現する。これを、信号重畳部23によって制御信号から減算すると、該パルスの持続時間が長いために、ステアリングホイールのアシスト量が、ほぼ定常的に減少することとなる。したがって、(a)や(b)のような振動感は低減されることとなる。アシスト量が定常的に低減されるため、たとえば図2のような状況の場合には、車両V1の車線2へ向かうハンドル操作が重くなり、よって、車線2へ車両V1が向かわないような運転操作を運転者に促すことができる。
【0038】
このように、持続時間の短いパルスは、警報状態を表現することができ、該パルスの周波数を高めるほど、より強く、運転者の注意を促すことができる。他方、持続時間の長いパルスは、操作支援状態を表現することができる。パルスの持続時間を長くするほど、該パルス信号は、一定振幅値を持つ信号形態に近づくこととなり(デューティ比が100%は、一定振幅値Aを持つ信号となる)、アシスト量の低減が定常的になって、物体に近づく方向へのハンドル操作の防止を支援することができる。
【0039】
図3の(d)は、(c)よりも振幅値Aが大きくなっており、他のパラメータ値は(c)と同じである。制御信号からパルス信号を減算した場合、振幅値Aが大きいほど、アシスト量を低減する量が大きくなる。したがって、振幅値Aを大きくすることにより、物体を回避するための操作支援の効果を、より強めることができる。
【0040】
このように、パルス形状を規定する3つのパラメータを用いることにより、同じ電動パワーステアリング機構を介して、警報状態および操作支援状態を表現することができる。パルス幅の短い(a)や(b)の状態から、パルス幅の長い(c)の状態へパルス信号の形状を変化させることにより、警報状態から操作支援状態へと、シームレスに変化させることができる。さらに、パルスの大きさが大きい(d)の状態を付加的に含めることにより、操作支援を、より効果的なものとすることができる。
【0041】
なお、図3の例では、信号重畳部23によって、制御信号からパルス信号を減算する形態を示しているが、重畳は、後述するように、パルス信号の持続時間に応じてアシスト量が低減されるように行われればよく、よって、図3に示すパルス信号の正負を反転したものを制御信号に加算する形態でもよい。
【0042】
物体に対する車両のリスク(危険)の状態を表すパラメータとして、前述したような距離d、相対速度ve、および余裕時間TTCがあり、これらのうちの1つまたは複数を、上記のパルス信号のパラメータである周波数f、デューティ比X、振幅Aのうちの1つまたは複数に関連づける。この関連づけの設定は、任意に行うことができるが、この実施形態では、好ましい関連づけとして、相対速度veを周波数fに関連づけ、距離dまたは余裕時間TTCをデューティ比Xに関連づける。
【0043】
相対速度veは、物体に対する切迫度を表している。相対速度が高いほど、物体が急速に自車両に近づいていることを表しているからである。他方、距離dおよび余裕時間TTCは、自車両が物体にどの程度実際に近づいているかを表している。したがって、物体にまだそれほど近づいていないけれども、該物体が急速に近づいているときには、パルスの周波数を高めることによって、ハンドルをブルブルと振動させ、運転者に警報を与える。そして、自車両が物体に実際に近づいてきたときには、パルスのデューティ比を大きくすることによって、ハンドル操作が該物体に向かわないよう操作支援する。こうすることにより、警報状態から操作支援状態へと、運転者をスムーズに誘導することができる。同じ操舵補助手段(電動パワーステアリング機構)を介して運転者を誘導していくので、警報状態から操作支援状態の間で、確実に、運転者に気付かせることができる。仮に、運転者が警報に気付くのが遅れたとしても、ハンドルの振動がおさまるにつれて物体へ向かうハンドル操作が重くなるので、物体を回避する行動を取るべきことを速やかに認識することができる。さらに、相対速度の増大なくして車両が急激に物体に近づいた場合には、警報段階が自動的に割愛されて、操作支援状態に入ることができる。危険状態に応じて警報と操作支援との切り分けが自動的に行われるので、予め様々な条件づけを行って両者を切り分けるプログラムを作成する必要がない。
【0044】
さらに、一実施例では、距離dを、振幅値Aに相関づける。これにより、物体への距離が実際に近づくにつれて、物体へと向かうハンドル操作がより重くなるため、回避動作を、より効果的に支援することができる。
【0045】
なお、上記の関連づけは、相対速度veの所定範囲を、周波数fの所定範囲に対応づけ、余裕時間TTCまたは距離dの所定範囲を、デューティ比Xの所定範囲(たとえば、10〜100%)に対応づけ、距離dの所定範囲を、振幅値Aの所定範囲に対応づけ、これを、たとえばマップ(テーブル)に規定してメモリ等の記憶装置に格納することができる。当然ながら、相対速度veの大きさが大きくなるほど周波数fが高くなるように対応づけが行われ、余裕時間TTCまたは距離dが短くなるほどデューティ比Xが大きくなるように対応づけが行われ、距離dが短くなるほど振幅値Aが大きくなるように対応づけが行われる。
【0046】
パルス信号生成部16は、算出された相対速度ve、距離d、余裕時間TTCに基づいて、該記憶されたマップを参照することにより、対応する周波数f、デューティ比X、振幅値Aを求め、これらの周波数f、デューティ比X、振幅値Aを持つパルス信号を生成することができる。こうして生成されたパルス信号は、前述したように、信号重畳部23に渡され、制御信号に重畳される。ここでの「重畳」は、パルス信号のパルスの持続時間(オン時間)にわたってアシスト量が低減するように(言い換えれば、ステアリングホイールの操作に対する反力が増大するように)、行われる。
【0047】
たとえば、制御信号の値が、所望のアシスト量を生成するための目標電流値(正値)を示すならば、該パルス信号は、該電流値を減じるように重畳されることとなる。結果として、該パルスの持続時間にわたって、該減じられた目標電流がステアリングアクチュエータ30に印加されることにより、アシスト量が低減されることとなる。
【0048】
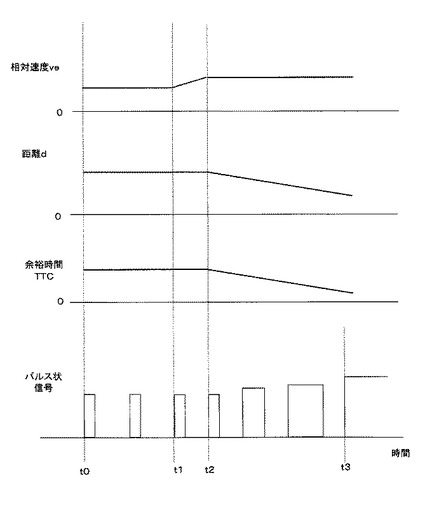
図4には、車両のリスクを表すパラメータ(相対速度ve、距離d、余裕時間TTC)と、対応して生成されるパルス信号の一例が示されている。この例では、相対速度ve、余裕時間TTC、距離dを、それぞれ、周波数f(周期)、デューティ比X、振幅Aに関連づけている。
【0049】
この例では、時間t1において相対速度の増加が生じており、よって、時間t1以降のパルスの周期Tが、時間t1前のパルスの周期Tよりも短くなっている。時間t2以降、距離dおよび余裕時間TTCは減少しており、これに伴って、パルスのデューティ比Xは、除々に増大されると共に、振幅値Aも除々に増大されている。時間t3では、余裕時間TTCの低減により、デューティ比が100%になってしまい、パルス信号は、もはやパルスの形状を取ることはなく、一定値の信号となる。よって、時間t3以降は、一定のアシスト量低減が連続的に行われる状態となっている。
【0050】
運転者は、時間t2あたりまでは、比較的デューティ比が小さいパルス信号が重畳されるために、ハンドルの振動を間欠的に感じることとなる。相対速度の増大によってハンドルの振動周期が短くなることにより、運転者に、切迫感が高まっていることを認識させることができる。また、時間t2以降は、デューティ比が大きくなるため、ハンドルの間欠的な振動は低減されていくものの、アシスト量の低減が連続的になるため、ハンドル操作が除々に重くなっていく。これにより、運転者は、物体に実際に近づかないような行動を取るべきことを認識することができる。たとえば、図2の例では、運転者は、車線変更せずに直進走行すべきことを認識することができる。
【0051】
図1に戻り、好ましくは判定部17が設けられる。判定部17は、自車両が、現在の走行路(車線)から逸れる可能性が高いか否かを判定する。現在の走行路から逸れる可能性が高いと判定したならば、パルス状信号の重畳を行うよう、信号重畳部23に指示する。現在の走行路から逸れる可能性が低いと判定したならば、パルス状信号の重畳を禁止するよう、信号重畳部23に指示する。後者の場合、信号重畳部23は、制御信号生成部21によって生成された制御信号を、そのままステアリングアクチュエータ30に送出することとなる。
【0052】
図2に示されるように、この実施形態では、自車両が現在の走行路から、車線変更や他の要因等で逸れることに起因して物体と衝突することを回避しようとするものである。現在の走行路から逸れない場合には、すなわち現在の走行路を維持する場合には、このような衝突は起こらないため、警報および操作支援が起動しないように、信号の重畳を禁止する。これにより、運転者の煩わしさを回避することができる。
【0053】
現在の走行路から逸れる可能性の判定は、任意の適切な手法で行うことができる。たとえば、前述したように、予測軌跡算出部15によって、現在の車線から出るような軌跡が算出された場合、現在の走行路から逸れる可能性が高いと判定することができる。これに加えて、もしくは代替的に、検出された物体側に方向指示器を運転者が操作したことを検知した場合に、現在の走行路から逸れる可能性が高いと判定してもよい。
【0054】
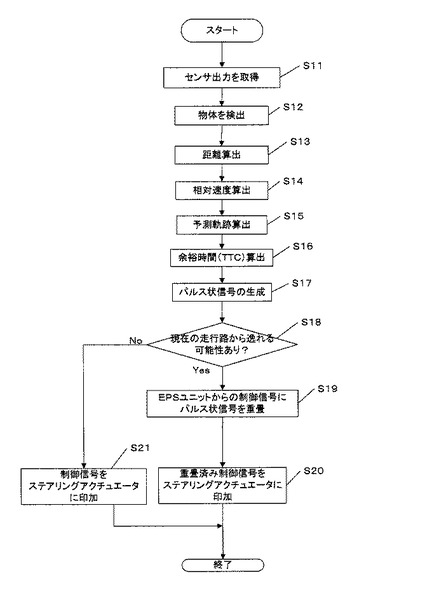
図5は、この発明の一実施形態に従う、運転支援装置によって実施されるプロセスのフローチャートを示す。該プロセスは、所定時間間隔で実行されることができる。
【0055】
ステップS11において、外界センサ1、車速センサ3、ヨーレートセンサ5の出力を取得する。ステップS12において、外界センサ1の出力に基づいて、物体を検出する。ステップS13において、該検出された物体の自車両からの距離dを算出し、ステップS14において、該検出された物体の自車両に対する相対速度veを算出する。相対速度veは、自車両に近づく方向に正値を取るよう算出される。
【0056】
ステップS15において、前述したように、たとえば車速およびヨーレートに基づいて、車両の走行軌跡を予測する。ステップS16において、検出された物体が、現在の速度および方向を維持すると仮定して、該物体の走行軌跡を算出し、これと、自車両について予測された走行軌跡とに基づいて、自車両が該物体に到達するまでの時間を、余裕時間TTCとして算出する。
【0057】
ステップS17において、算出された相対速度ve、距離dおよび余裕時間TTCに基づいて、パルス状信号を生成する。この実施形態では、前述したように、算出された相対速度veの大きさが大きいほど、パルスの周波数fが高くなるように、かつ、算出された距離dまたは余裕時間TTCが小さいほど、デューティ比Xが大きくなるように、パルス状信号が生成される。これに加えて、算出された距離dが小さいほど、パルスの振幅値Aが大きくなるように、パルス状信号を生成してもよい。
【0058】
ステップS17において、車両が、たとえば車線変更によって、現在の走行路(車線)から逸れる可能性が高いかどうかを判定する。前述したように、算出された走行軌跡に基づいて判定してもよいし、方向指示器が運転者により操作されたことに基づいて判定してもよい。現在の走行路から逸れる可能性が高いと判定されたならば、ステップS19において、パルス状信号を、EPS制御ユニット20で算出された制御信号に重畳する。前述したように、重畳は、該パルスの持続時間(オンである時間)にわたってアシスト量が減少するように、行われる。
【0059】
ステップS20において、該重畳によって得られた制御信号を、ステアリングアクチュエータ30に送出する。これにより、パルスの持続時間にわたってアシスト量が減じるように、操舵力が補助される。したがって、パルスのデューティ比が短ければ、ハンドルを持つ運転者は、ハンドルが振動しているように感じることとなるが、パルスのデューティ比が長くなるほど、該振動の感覚は軽減し、ハンドル操作が重くなる。
【0060】
ステップS18において、現在の走行路から逸れる可能性が高くない、すなわち低いと判定されたならば、ステップS21に進み、ステップS17で生成されたパルス状信号を重畳することなく、制御信号をステアリングアクチュエータ30に印加する。これにより、パルス状信号による警報および操作支援は何ら行われず、通常の運転状態となる。
【0061】
上記の実施形態では、前述したように、相対速度veと周波数f、距離dまたは余裕時間TTCとデューティ比X、距離dと振幅値Aとを関連づけた。これにより、切迫度が高まるにつれて運転者に強い警報を与えることができると共に、実際に物体に接近していくにつれて、ハンドル操作を重くして回避行動を支援することができる。
【0062】
しかしながら、パルスの周波数f、デューティ比X、振幅値Aは、独立に変化させることが可能であるので、他の実施形態では、他の関連づけを実現することができる。
【0063】
たとえば、距離dを周波数fに関連づけ、余裕時間TTCをデューティ比Xに関連づけてもよい。距離dが小さくなるほど周波数fを高くすると共に、余裕時間TTCが短くなるほどデューティ比Xを大きくする。これにより、距離感を、警報状態下で運転者に知らせることができる。たとえば、物体との距離は近いが、操舵量が少ないがために該物体に到達するまでの時間TTCが長いとき、パルス状信号の周波数fは高めになるが、デューティ比Xは小さい。これにより、警報状態となり、運転者に、まだ到達するまでに余裕はあるものの、物体がどの程度の距離に存在するかを知らせることができる。
【0064】
また、他の例では、余裕時間TTCを振幅値Aに関連づけ、距離dをデューティ比Xに関連づけてもよい。余裕時間TTCが小さくなるほど振幅値Aを大きくすると共に、距離dが小さくなるほどデューティ比Xを大きくする。物体に除々に近づく場合、持続時間の短いパルスが出力される警報効果の高い状態から、除々に、デューティ比が長く、かつその大きさ(振幅)が大きくなる操作支援状態へと、パルス状信号がシームレスに変化することとなる。仮に、運転者が急に車線変更するような場合には、警報の段階を自動的にスキップして、操作支援状態にすることができる。このように、リスクの状態に応じて、自動的に、警報から操作支援状態へとシームレスに運転者を誘導することができるので、警報と操作支援とを別個に出力するためのプログラムは不要となり、より簡単なアルゴリズムで、運転支援を実現することができる。
【0065】
さらに、たとえば外界センサ等のセンサ出力の精度が、何らかの適切な手法で低いと判断された場合には、たとえば、デューティ比の増大を所定値(たとえば、50%)以下に抑えることにより、警報状態は実現するが操作支援状態は抑制する、というようにしてもよい。こうして、センサの出力の信頼度が低い場合に誤って操舵が誘導されるのを回避することができる。
【0066】
なお、上記の実施形態では、物体として、図2に示すように他の車両を検出したが、検出すべき物体は、車両に限定されず、たとえば自転車のような他の移動物体も含まれ、また、静止物体を含めることもできる。
【0067】
以上のように、この発明の特定の実施形態について説明したが、本願発明は、これら実施形態に限定されるものではない。
【符号の説明】
【0068】
1 外界センサ
10 処理ユニット
20 EPS制御ユニット
30 ステアリングアクチュエータ
【技術分野】
【0001】
この発明は、車両周辺の物体を回避すべく、車両の運転者の操舵を支援するための装置に関する。
【背景技術】
【0002】
従来、後側方の死角を支援するものとしてミラーが車両に設けられており、また、最近においては、車両に取り付けられたレーダやカメラなどで、外界の他の車両等の物体を検知して運転者に通知することが提案されている。運転者への通知だけでなく、たとえばブレーキ制御を介して、物体を回避するために車両の走行を制御することも提案されている。
【0003】
さらに、下記の特許文献には、車両を目標車線に車線変更する際に衝突を回避するための方法が記載されている。この方法では、車両の後側方にある物体を検出し、段階的な警報を行う。第1段階では、車線変更によって検出物体との前後間隔が安全な間隔より狭くなるであろう場合に光学的警報信号が出力される。第2段階では、警報に値する物体側に運転者が方向指示器のスイッチを入れると、音響的警報信号が出力される。第3段階では、検出物体と衝突する可能性がある目標車線への車線変更を開始したとの認識に応じて、触覚的警報信号が出力される。触覚的警報信号の出力は、操作モーメントをハンドルに加えることによって行われる。第4段階では、車線変更の開始が認識され、かつ目標車線上にある物体の潜在的危険度が大きい場合に、車両を車線に戻すための措置が実施される。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2008−531388号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
車両の周辺に、他の車両のような物体が検出された場合、状況に応じて、運転者の気付きのための警報を行うと共に、運転者の運転操作の支援を行うことが考えられる。警報と操作支援を組み合わせることで、より効果的に、運転者の物体に対する回避行動を支援することができる。
【0006】
しかしながら、従来の手法では、警報と操作支援を組み合わせる(つなげる)のに、運転者に違和感を生じさせるおそれがある。すなわち、事前に、音や振動子を用いて警報を行う場合、該警報段階では、運転者が気付かなかったり、気付いたとしてもどのような危険が迫っているのかを運転者が理解しにくい場合がある。そのため、運転者が、あるべき行動を起こす前に、システムによる回避のための操作支援が起動されてしまうおそれがある。これは、運転者が意図していない走行状態が開始される等、運転者に違和感を生じさせるおそれがある。たとえば、操作支援としてブレーキ制御を行うと、運転者の意思に反したブレーキ動作が突発的に生じるおそれがあり、運転者に違和感を生じさせやすい。
【0007】
したがって、本発明は、車両周辺の物体について、運転者に気付かせる役割を果たす警報と、回避のために運転者の運転操作を支援するための操作支援とを、運転者に違和感を生じさせないようシームレスに組み合わせる手法を提案する。
【課題を解決するための手段】
【0008】
この発明の一つの側面によると、車両周辺に存在する物体を検出する手段と、前記車両から前記物体までの距離を算出する手段と、前記物体の前記車両に対する相対速度を算出する手段と、前記車両が前記物体に到達するまでの余裕時間を算出する手段と、制御信号をステアリングアクチュエータに印加して、前記車両のステアリングホイールの操舵を補助する操舵補助手段と、を備える運転支援装置は、前記距離、前記相対速度、および前記余裕時間の少なくとも1つに応じて、パルス状の信号を生成する生成手段と、前記パルス状の信号を前記制御信号に重畳する手段と、を備え、前記パルス状の信号が重畳された制御信号が、前記ステアリングアクチュエータに印加され、前記生成手段は、前記相対速度が大きくなるほど、パルスの周波数が高くなると共に、前記距離または前記余裕時間が小さくなるほど、該パルスのデューティ比が大きくなるよう、前記パルス状の信号を生成する。
【0009】
この発明によれば、パルス状の信号を制御信号に重畳した上で、ステアリングアクチュエータに印加する。このようなパルスの印加は、該パルスの持続時間(パルスがオンの時間)に応じてハンドルを振動させることができるため、運転者に気付きを与えることができ、警報の役割を果たす。物体の相対速度が大きくなるほど切迫感が高まるが、これを、パルスの周波数すなわちハンドルが振動する頻度で運転者に知らせることができる。一方、該パルスのデューティ比を大きくするにつれて、該パルス状の信号は、一定振幅値を持つ信号の形態に近づいてゆく。そのため、ハンドルが振動している感覚は低減していき、アシスト量(操舵を補助する力)が常時低減された状態になっていく。距離または余裕時間が小さくなるほど、すなわち実際に物体に近づくほど、該パルスのデューティ比を大きくすることにより、物体の方へ近づかないような操作支援を実現することができる。
【0010】
このように、時々刻々と変化するリスクの状態(相対速度、距離、余裕時間により表される)を、同じ操舵補助手段を介して連続的に表現することができるので、警報と操作支援とをシームレスにつなげることができる。したがって、運転者に違和感を生じさせることなく、警報状態から操作支援状態へと運転者を誘導することができる。仮に、警報の段階で運転者の気付きが遅れても、気付いた時点で違和感なく回避行動につなげていくことができる。
【0011】
この発明の一実施形態によると、前記距離が小さいほど、前記パルス状の信号の振幅を大きくする。
【0012】
パルス状の信号の振幅を大きくし、この信号を制御信号に重畳することにより、物体の方向へ操舵しにくいようにアシスト量を低減することができる。したがって、車両が物体に実際に近づくにつれて、物体の方へ近づかないような操作支援を、より効果的に実現することができる。
【0013】
この発明の一実施形態によると、車両が現在の走行路から逸れる可能性を判定する手段を備え、該可能性が低いと判定された場合には、前記パルス状の信号の制御信号への重畳を禁止する。こうして、現在の走行路を走行している場合には、車線変更等による現在の走行路から逸れることに起因した物体との衝突は生じないため、警報および操作支援を抑制して、運転者のわずらわしさを軽減することができる。
【0014】
本発明のその他の特徴及び利点については、以下の詳細な説明から明らかである。
【図面の簡単な説明】
【0015】
【図1】この発明の一実施例に従う、車両の運転支援装置の構成を示すブロック図。
【図2】この発明の一実施例に従う、運転支援装置が適用されうる状況の一例を示す図。
【図3】この発明の一実施例に従う、パルス状信号の形態例を示す図。
【図4】この発明の一実施例に従う、車両のリスク状態を表すパラメータに応じて生成されるパルス状信号の一例を示す図。
【図5】この発明の一実施例に従う、運転支援プロセスのフローチャート。
【発明を実施するための形態】
【0016】
次に図面を参照してこの発明の実施の形態を説明する。図1は、この発明の一実施形態に従う、車両に搭載された運転支援装置の構成を示すブロック図である。
【0017】
外界センサ1は、車両周辺の所望の方向に存在する物体を検出するよう、車両の適切な場所に取り付けられる。この実施形態では、外界センサ1は、車両の左右側方(左右後側方でもよい)に存在する物体を検知するよう、車両の左右の側部(たとえば、ドアミラー近傍)に取り付けられている。
【0018】
外界センサ1は、たとえばミリ波やレーザなどの電磁波によるレーダ装置および(または)撮像装置を備えるよう構成されることができる。ここで、レーダ装置は、任意の既知の適切なレーダ装置で実現されることができる。レーダ装置は、たとえば、自車両の外界に設定された検出対象領域を走査するよう電磁波の発信信号を発信する。該発信信号が、自車両の外部の物体(たとえば、他車両や構造物など)によって反射されることで生じた反射信号を受信し、該物体までの距離および方位を示す信号を生成し、処理ユニット10に出力する。また、撮像装置は、任意の既知の適切な撮像装置で実現されることができる。撮像装置は、1または複数のカメラにより撮像された画像を取得し、該画像データを処理ユニット10に出力する。
【0019】
車速センサ3は、車両の走行速度(車速)を検出するセンサであり、ヨーレートセンサ5は、車両のヨーレートを検出するセンサであり、これらの検出値は、処理ユニット10に送られる。
【0020】
処理ユニット10およびEPS(電動パワーステアリング)制御ユニット20は、それぞれ、中央処理装置(CPU)およびメモリを備えるコンピュータである電子制御装置(ECU)に実現されることができる。図には、処理ユニット10およびEPS制御ユニット20によって実現される機能がブロックとして表されている。この実施形態では、処理ユニット10は、物体検出部11、距離算出部12、相対速度算出部13、TTC(余裕時間)算出部14、予測軌跡算出部15、パルス信号生成部16、および判定部17を備える。EPS制御ユニット20は、制御信号生成部21および信号重畳部23を備える。
【0021】
車両には、電動パワーステアリング機構が設けられており、該機構において、ステアリングアクチュエータ30は、その内部に含むモータにより、ステアリングホイールに結合されたステアリングシャフト(いずれも図示せず)を駆動する。該モータの出力トルクを制御することにより、ステアリング操作における補助操舵力(アシスト量)を制御することができる。
【0022】
具体的には、EPS制御ユニット20の制御信号生成部21が、ステアリングアクチュエータ30に送出するための制御信号を生成する。たとえば、車両の現在の操舵トルクおよび車速等に基づいてベース電流を算出し、該ベース電流を、たとえば現在のヨーレートに基づいて補正して目標電流を算出し、該目標電流が該モータに供給されるように、ステアリングアクチュエータ30に送出するための制御信号を生成することができる。これにより、目標電流に応じた補助操舵力を生成して、運転者による運転操作をアシストすることができる。
【0023】
上記の電動パワーステアリング機構および該機構中のステアリングアクチュエータ30を制御するための制御信号の生成は、既知の適切な手法により実現されることができ、たとえば、特開2007−283954号に一例が記載されている。
【0024】
この実施形態では、EPS制御ユニット20に信号重畳部23が設けられており、信号重畳部23は、処理ユニット10のパルス信号生成部16によって生成されたパルス状の信号を受け取り、これを、制御信号生成部21によって生成された制御信号に重畳する。重畳された制御信号が、ステアリングアクチュエータ30に印加される。
【0025】
該パルス状の信号の重畳により、前述したような、パルスの持続時間に応じてステアリングホイール(ハンドル)を振動させる警報状態から、ステアリングホイールのアシスト量を定常的に低減する操作支援状態へと、シームレスに移行させることができる。
【0026】
以下、処理ユニット10によって実行される、パルス状の信号の生成について、説明する。
【0027】
物体検出部11は、外界センサ1の出力信号から、車両の周辺に存在する物体を検出する。たとえば、他の車両を、物体として検出することができる。たとえば、前述したレーダ装置からの出力信号および撮像装置からの画像データに基づいて、既知の手法により、他の車両等の物体を検出することができる。
【0028】
距離算出部12は、物体検出部11によって検出された物体までの自車両からの距離(相対距離)を算出する。相対速度算出部13は、該検出された物体の速度と自車両の速度に基づいて、物体の自車両に対する相対速度を算出する。物体の速度は、外界センサ1によって該物体を時間的に追跡することにより算出することができる。自車両の速度は、車速センサ3により検出されることができる。
【0029】
予測軌跡算出部15は、車速センサ3によって検出された自車両の速度とヨーレートセンサ5によって検出された自車両のヨーレートに基づき、自車両の今後の軌跡を推定(予測)する。具体的には、予測軌跡算出部15は、検出されたヨーレートおよび車速から、車両の旋回半径を算出し、自車両の現在の進行方向に、該算出した旋回半径の円弧を連ねることにより、自車両の将来の走行軌跡を予測することができる。
【0030】
TTC算出部14は、自車両の物体に到達するまでの時間(衝突余裕時間(TTC:time to collision)と呼ばれる)を算出する。たとえば、予測軌跡算出部15によって算出された予測軌跡と、検出された物体が現在の速度および方向を維持して走行したと仮定した場合の軌跡との交点を求め、自車両が該交点に到達するまでの時間を、余裕時間TTCとして求めることができる。
【0031】
ここで図2を参照すると、本願発明が効果的に適用されうる、運転者の操舵(旋回)操作によって物体と衝突する可能性のある状況の一例が示されている。自車両V1が車線1を走行しており、他の車両V2が、車線1の隣にある車線2を走行している。自車両V1には、車両の左側方の物体を検出するよう外界センサ1が設けられており、よって、外界センサ1により、他の車両V2を検出することができる。これにより、他の車両V2への距離dおよび他の車両V2の相対速度veが算出される。
【0032】
車両V1は、車線1から車線2に車線変更する動作に入っており、予測軌跡算出部15は、前述したように、車両V1の車線2への軌跡を予測する。予測された軌跡が、点線dL1で示されている。他方、他の車両V2は、車線2を直進走行しており、点線dL2のように、軌跡が推定される。軌跡dL1とdL2の交点Iが算出され、車両V1の現在位置から交点Iまでの距離と、車両V1の現在の車速に基づいて、該交点Iに車両V1が到達するまでの時間TTCを算出することができる。代替的に、車両V1が、車線V2に侵入する地点までの時間を、余裕時間TTCとして算出するようにしてもよい。
【0033】
パルス信号生成部16は、前述したように、ステアリングアクチュエータ30を駆動する制御信号に重畳すべき信号を、算出された距離d、相対速度ve、余裕時間TTCのうちの1つまたは複数に基づいて、生成する。生成される信号は、パルス状の信号(パルス形状を有した信号の趣旨であり、以下、単にパルス信号と呼ぶことがある)である。
【0034】
ここで、図3の(a)を参照すると、該パルス信号の所定の基準状態の一例が示されており、該信号は、周波数fすなわち周期Tを持ち、振幅がAであり、デューティ比(パルス幅の周期に対する比)がX(%)である。このように、パルス信号の形状を表すパラメータには、周波数(周期)、振幅、デューティ比の3つが存在する。
【0035】
図3の(b)〜(d)は、これらのパラメータの大きさを変化させたものであり、(b)は、(a)よりも周波数fが高く(周期Tが短く)なっており、他のパラメータ値は同じである。(c)は、(a)よりもデューティ比Xが大きくなっており、他のパラメータ値は同じである。
【0036】
(a)や(b)の状態は、比較的持続時間(パルス幅)の短いパルス(デューティ比が所定値(たとえば、50%)以下のパルス)が、定期的に出現する。これを、EPS制御ユニット20の信号重畳部23によって制御信号から減算すると、該パルスの持続時間に応じて、ステアリングホイールのアシスト量が瞬間的に減少するため、ハンドルを持つ運転者には、ハンドルに瞬間的な振動(ブルッというような振動)が生じているように感じる。したがって、このようなパルス信号の重畳により、運転者に警報を与えることができる。(b)のようにパルスの周波数を高めることにより、運転者の注意を、より強く喚起することができる。
【0037】
他方、(c)の状態は、比較的持続時間の長いパルス(デューティ比が所定値(たとえば、50%)以上のパルス)が、定期的に出現する。これを、信号重畳部23によって制御信号から減算すると、該パルスの持続時間が長いために、ステアリングホイールのアシスト量が、ほぼ定常的に減少することとなる。したがって、(a)や(b)のような振動感は低減されることとなる。アシスト量が定常的に低減されるため、たとえば図2のような状況の場合には、車両V1の車線2へ向かうハンドル操作が重くなり、よって、車線2へ車両V1が向かわないような運転操作を運転者に促すことができる。
【0038】
このように、持続時間の短いパルスは、警報状態を表現することができ、該パルスの周波数を高めるほど、より強く、運転者の注意を促すことができる。他方、持続時間の長いパルスは、操作支援状態を表現することができる。パルスの持続時間を長くするほど、該パルス信号は、一定振幅値を持つ信号形態に近づくこととなり(デューティ比が100%は、一定振幅値Aを持つ信号となる)、アシスト量の低減が定常的になって、物体に近づく方向へのハンドル操作の防止を支援することができる。
【0039】
図3の(d)は、(c)よりも振幅値Aが大きくなっており、他のパラメータ値は(c)と同じである。制御信号からパルス信号を減算した場合、振幅値Aが大きいほど、アシスト量を低減する量が大きくなる。したがって、振幅値Aを大きくすることにより、物体を回避するための操作支援の効果を、より強めることができる。
【0040】
このように、パルス形状を規定する3つのパラメータを用いることにより、同じ電動パワーステアリング機構を介して、警報状態および操作支援状態を表現することができる。パルス幅の短い(a)や(b)の状態から、パルス幅の長い(c)の状態へパルス信号の形状を変化させることにより、警報状態から操作支援状態へと、シームレスに変化させることができる。さらに、パルスの大きさが大きい(d)の状態を付加的に含めることにより、操作支援を、より効果的なものとすることができる。
【0041】
なお、図3の例では、信号重畳部23によって、制御信号からパルス信号を減算する形態を示しているが、重畳は、後述するように、パルス信号の持続時間に応じてアシスト量が低減されるように行われればよく、よって、図3に示すパルス信号の正負を反転したものを制御信号に加算する形態でもよい。
【0042】
物体に対する車両のリスク(危険)の状態を表すパラメータとして、前述したような距離d、相対速度ve、および余裕時間TTCがあり、これらのうちの1つまたは複数を、上記のパルス信号のパラメータである周波数f、デューティ比X、振幅Aのうちの1つまたは複数に関連づける。この関連づけの設定は、任意に行うことができるが、この実施形態では、好ましい関連づけとして、相対速度veを周波数fに関連づけ、距離dまたは余裕時間TTCをデューティ比Xに関連づける。
【0043】
相対速度veは、物体に対する切迫度を表している。相対速度が高いほど、物体が急速に自車両に近づいていることを表しているからである。他方、距離dおよび余裕時間TTCは、自車両が物体にどの程度実際に近づいているかを表している。したがって、物体にまだそれほど近づいていないけれども、該物体が急速に近づいているときには、パルスの周波数を高めることによって、ハンドルをブルブルと振動させ、運転者に警報を与える。そして、自車両が物体に実際に近づいてきたときには、パルスのデューティ比を大きくすることによって、ハンドル操作が該物体に向かわないよう操作支援する。こうすることにより、警報状態から操作支援状態へと、運転者をスムーズに誘導することができる。同じ操舵補助手段(電動パワーステアリング機構)を介して運転者を誘導していくので、警報状態から操作支援状態の間で、確実に、運転者に気付かせることができる。仮に、運転者が警報に気付くのが遅れたとしても、ハンドルの振動がおさまるにつれて物体へ向かうハンドル操作が重くなるので、物体を回避する行動を取るべきことを速やかに認識することができる。さらに、相対速度の増大なくして車両が急激に物体に近づいた場合には、警報段階が自動的に割愛されて、操作支援状態に入ることができる。危険状態に応じて警報と操作支援との切り分けが自動的に行われるので、予め様々な条件づけを行って両者を切り分けるプログラムを作成する必要がない。
【0044】
さらに、一実施例では、距離dを、振幅値Aに相関づける。これにより、物体への距離が実際に近づくにつれて、物体へと向かうハンドル操作がより重くなるため、回避動作を、より効果的に支援することができる。
【0045】
なお、上記の関連づけは、相対速度veの所定範囲を、周波数fの所定範囲に対応づけ、余裕時間TTCまたは距離dの所定範囲を、デューティ比Xの所定範囲(たとえば、10〜100%)に対応づけ、距離dの所定範囲を、振幅値Aの所定範囲に対応づけ、これを、たとえばマップ(テーブル)に規定してメモリ等の記憶装置に格納することができる。当然ながら、相対速度veの大きさが大きくなるほど周波数fが高くなるように対応づけが行われ、余裕時間TTCまたは距離dが短くなるほどデューティ比Xが大きくなるように対応づけが行われ、距離dが短くなるほど振幅値Aが大きくなるように対応づけが行われる。
【0046】
パルス信号生成部16は、算出された相対速度ve、距離d、余裕時間TTCに基づいて、該記憶されたマップを参照することにより、対応する周波数f、デューティ比X、振幅値Aを求め、これらの周波数f、デューティ比X、振幅値Aを持つパルス信号を生成することができる。こうして生成されたパルス信号は、前述したように、信号重畳部23に渡され、制御信号に重畳される。ここでの「重畳」は、パルス信号のパルスの持続時間(オン時間)にわたってアシスト量が低減するように(言い換えれば、ステアリングホイールの操作に対する反力が増大するように)、行われる。
【0047】
たとえば、制御信号の値が、所望のアシスト量を生成するための目標電流値(正値)を示すならば、該パルス信号は、該電流値を減じるように重畳されることとなる。結果として、該パルスの持続時間にわたって、該減じられた目標電流がステアリングアクチュエータ30に印加されることにより、アシスト量が低減されることとなる。
【0048】
図4には、車両のリスクを表すパラメータ(相対速度ve、距離d、余裕時間TTC)と、対応して生成されるパルス信号の一例が示されている。この例では、相対速度ve、余裕時間TTC、距離dを、それぞれ、周波数f(周期)、デューティ比X、振幅Aに関連づけている。
【0049】
この例では、時間t1において相対速度の増加が生じており、よって、時間t1以降のパルスの周期Tが、時間t1前のパルスの周期Tよりも短くなっている。時間t2以降、距離dおよび余裕時間TTCは減少しており、これに伴って、パルスのデューティ比Xは、除々に増大されると共に、振幅値Aも除々に増大されている。時間t3では、余裕時間TTCの低減により、デューティ比が100%になってしまい、パルス信号は、もはやパルスの形状を取ることはなく、一定値の信号となる。よって、時間t3以降は、一定のアシスト量低減が連続的に行われる状態となっている。
【0050】
運転者は、時間t2あたりまでは、比較的デューティ比が小さいパルス信号が重畳されるために、ハンドルの振動を間欠的に感じることとなる。相対速度の増大によってハンドルの振動周期が短くなることにより、運転者に、切迫感が高まっていることを認識させることができる。また、時間t2以降は、デューティ比が大きくなるため、ハンドルの間欠的な振動は低減されていくものの、アシスト量の低減が連続的になるため、ハンドル操作が除々に重くなっていく。これにより、運転者は、物体に実際に近づかないような行動を取るべきことを認識することができる。たとえば、図2の例では、運転者は、車線変更せずに直進走行すべきことを認識することができる。
【0051】
図1に戻り、好ましくは判定部17が設けられる。判定部17は、自車両が、現在の走行路(車線)から逸れる可能性が高いか否かを判定する。現在の走行路から逸れる可能性が高いと判定したならば、パルス状信号の重畳を行うよう、信号重畳部23に指示する。現在の走行路から逸れる可能性が低いと判定したならば、パルス状信号の重畳を禁止するよう、信号重畳部23に指示する。後者の場合、信号重畳部23は、制御信号生成部21によって生成された制御信号を、そのままステアリングアクチュエータ30に送出することとなる。
【0052】
図2に示されるように、この実施形態では、自車両が現在の走行路から、車線変更や他の要因等で逸れることに起因して物体と衝突することを回避しようとするものである。現在の走行路から逸れない場合には、すなわち現在の走行路を維持する場合には、このような衝突は起こらないため、警報および操作支援が起動しないように、信号の重畳を禁止する。これにより、運転者の煩わしさを回避することができる。
【0053】
現在の走行路から逸れる可能性の判定は、任意の適切な手法で行うことができる。たとえば、前述したように、予測軌跡算出部15によって、現在の車線から出るような軌跡が算出された場合、現在の走行路から逸れる可能性が高いと判定することができる。これに加えて、もしくは代替的に、検出された物体側に方向指示器を運転者が操作したことを検知した場合に、現在の走行路から逸れる可能性が高いと判定してもよい。
【0054】
図5は、この発明の一実施形態に従う、運転支援装置によって実施されるプロセスのフローチャートを示す。該プロセスは、所定時間間隔で実行されることができる。
【0055】
ステップS11において、外界センサ1、車速センサ3、ヨーレートセンサ5の出力を取得する。ステップS12において、外界センサ1の出力に基づいて、物体を検出する。ステップS13において、該検出された物体の自車両からの距離dを算出し、ステップS14において、該検出された物体の自車両に対する相対速度veを算出する。相対速度veは、自車両に近づく方向に正値を取るよう算出される。
【0056】
ステップS15において、前述したように、たとえば車速およびヨーレートに基づいて、車両の走行軌跡を予測する。ステップS16において、検出された物体が、現在の速度および方向を維持すると仮定して、該物体の走行軌跡を算出し、これと、自車両について予測された走行軌跡とに基づいて、自車両が該物体に到達するまでの時間を、余裕時間TTCとして算出する。
【0057】
ステップS17において、算出された相対速度ve、距離dおよび余裕時間TTCに基づいて、パルス状信号を生成する。この実施形態では、前述したように、算出された相対速度veの大きさが大きいほど、パルスの周波数fが高くなるように、かつ、算出された距離dまたは余裕時間TTCが小さいほど、デューティ比Xが大きくなるように、パルス状信号が生成される。これに加えて、算出された距離dが小さいほど、パルスの振幅値Aが大きくなるように、パルス状信号を生成してもよい。
【0058】
ステップS17において、車両が、たとえば車線変更によって、現在の走行路(車線)から逸れる可能性が高いかどうかを判定する。前述したように、算出された走行軌跡に基づいて判定してもよいし、方向指示器が運転者により操作されたことに基づいて判定してもよい。現在の走行路から逸れる可能性が高いと判定されたならば、ステップS19において、パルス状信号を、EPS制御ユニット20で算出された制御信号に重畳する。前述したように、重畳は、該パルスの持続時間(オンである時間)にわたってアシスト量が減少するように、行われる。
【0059】
ステップS20において、該重畳によって得られた制御信号を、ステアリングアクチュエータ30に送出する。これにより、パルスの持続時間にわたってアシスト量が減じるように、操舵力が補助される。したがって、パルスのデューティ比が短ければ、ハンドルを持つ運転者は、ハンドルが振動しているように感じることとなるが、パルスのデューティ比が長くなるほど、該振動の感覚は軽減し、ハンドル操作が重くなる。
【0060】
ステップS18において、現在の走行路から逸れる可能性が高くない、すなわち低いと判定されたならば、ステップS21に進み、ステップS17で生成されたパルス状信号を重畳することなく、制御信号をステアリングアクチュエータ30に印加する。これにより、パルス状信号による警報および操作支援は何ら行われず、通常の運転状態となる。
【0061】
上記の実施形態では、前述したように、相対速度veと周波数f、距離dまたは余裕時間TTCとデューティ比X、距離dと振幅値Aとを関連づけた。これにより、切迫度が高まるにつれて運転者に強い警報を与えることができると共に、実際に物体に接近していくにつれて、ハンドル操作を重くして回避行動を支援することができる。
【0062】
しかしながら、パルスの周波数f、デューティ比X、振幅値Aは、独立に変化させることが可能であるので、他の実施形態では、他の関連づけを実現することができる。
【0063】
たとえば、距離dを周波数fに関連づけ、余裕時間TTCをデューティ比Xに関連づけてもよい。距離dが小さくなるほど周波数fを高くすると共に、余裕時間TTCが短くなるほどデューティ比Xを大きくする。これにより、距離感を、警報状態下で運転者に知らせることができる。たとえば、物体との距離は近いが、操舵量が少ないがために該物体に到達するまでの時間TTCが長いとき、パルス状信号の周波数fは高めになるが、デューティ比Xは小さい。これにより、警報状態となり、運転者に、まだ到達するまでに余裕はあるものの、物体がどの程度の距離に存在するかを知らせることができる。
【0064】
また、他の例では、余裕時間TTCを振幅値Aに関連づけ、距離dをデューティ比Xに関連づけてもよい。余裕時間TTCが小さくなるほど振幅値Aを大きくすると共に、距離dが小さくなるほどデューティ比Xを大きくする。物体に除々に近づく場合、持続時間の短いパルスが出力される警報効果の高い状態から、除々に、デューティ比が長く、かつその大きさ(振幅)が大きくなる操作支援状態へと、パルス状信号がシームレスに変化することとなる。仮に、運転者が急に車線変更するような場合には、警報の段階を自動的にスキップして、操作支援状態にすることができる。このように、リスクの状態に応じて、自動的に、警報から操作支援状態へとシームレスに運転者を誘導することができるので、警報と操作支援とを別個に出力するためのプログラムは不要となり、より簡単なアルゴリズムで、運転支援を実現することができる。
【0065】
さらに、たとえば外界センサ等のセンサ出力の精度が、何らかの適切な手法で低いと判断された場合には、たとえば、デューティ比の増大を所定値(たとえば、50%)以下に抑えることにより、警報状態は実現するが操作支援状態は抑制する、というようにしてもよい。こうして、センサの出力の信頼度が低い場合に誤って操舵が誘導されるのを回避することができる。
【0066】
なお、上記の実施形態では、物体として、図2に示すように他の車両を検出したが、検出すべき物体は、車両に限定されず、たとえば自転車のような他の移動物体も含まれ、また、静止物体を含めることもできる。
【0067】
以上のように、この発明の特定の実施形態について説明したが、本願発明は、これら実施形態に限定されるものではない。
【符号の説明】
【0068】
1 外界センサ
10 処理ユニット
20 EPS制御ユニット
30 ステアリングアクチュエータ
【特許請求の範囲】
【請求項1】
車両周辺に存在する物体を検出する手段と、
前記車両から前記物体までの距離を算出する手段と、
前記物体の前記車両に対する相対速度を算出する手段と、
前記車両が前記物体に到達するまでの余裕時間を算出する手段と、
制御信号をステアリングアクチュエータに印加して、前記車両のステアリングホイールの操舵を補助する操舵補助手段と、を備える、車両に搭載された運転支援装置において、
前記距離、前記相対速度、前記余裕時間の少なくとも1つに応じて、パルス状の信号を生成する生成手段と、
前記パルス状の信号を前記制御信号に重畳する手段と、を備え、
前記パルス状の信号が重畳された制御信号が、前記ステアリングアクチュエータに印加され、
前記生成手段は、前記相対速度が大きくなるほど、パルスの周波数が高くなると共に、前記距離または前記余裕時間が小さくなるほど、該パルスのデューティ比が大きくなるよう、前記パルス状の信号を生成する、
運転支援装置。
【請求項2】
さらに、前記生成手段は、前記距離が小さいほど、前記パルス状の信号の振幅を大きくする、
請求項1に記載の運転支援装置。
【請求項3】
前記車両が現在の走行路から逸れる可能性を判定する手段を備え、該可能性が低いと判定された場合には、前記パルス状の信号の制御信号への重畳を禁止する、
請求項1または2に記載の運転支援装置。
【請求項1】
車両周辺に存在する物体を検出する手段と、
前記車両から前記物体までの距離を算出する手段と、
前記物体の前記車両に対する相対速度を算出する手段と、
前記車両が前記物体に到達するまでの余裕時間を算出する手段と、
制御信号をステアリングアクチュエータに印加して、前記車両のステアリングホイールの操舵を補助する操舵補助手段と、を備える、車両に搭載された運転支援装置において、
前記距離、前記相対速度、前記余裕時間の少なくとも1つに応じて、パルス状の信号を生成する生成手段と、
前記パルス状の信号を前記制御信号に重畳する手段と、を備え、
前記パルス状の信号が重畳された制御信号が、前記ステアリングアクチュエータに印加され、
前記生成手段は、前記相対速度が大きくなるほど、パルスの周波数が高くなると共に、前記距離または前記余裕時間が小さくなるほど、該パルスのデューティ比が大きくなるよう、前記パルス状の信号を生成する、
運転支援装置。
【請求項2】
さらに、前記生成手段は、前記距離が小さいほど、前記パルス状の信号の振幅を大きくする、
請求項1に記載の運転支援装置。
【請求項3】
前記車両が現在の走行路から逸れる可能性を判定する手段を備え、該可能性が低いと判定された場合には、前記パルス状の信号の制御信号への重畳を禁止する、
請求項1または2に記載の運転支援装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図2】
【図3】
【図4】
【図5】
【公開番号】特開2012−56398(P2012−56398A)
【公開日】平成24年3月22日(2012.3.22)
【国際特許分類】
【出願番号】特願2010−200156(P2010−200156)
【出願日】平成22年9月7日(2010.9.7)
【出願人】(000005326)本田技研工業株式会社 (23,863)
【Fターム(参考)】
【公開日】平成24年3月22日(2012.3.22)
【国際特許分類】
【出願日】平成22年9月7日(2010.9.7)
【出願人】(000005326)本田技研工業株式会社 (23,863)
【Fターム(参考)】
[ Back to top ]