
衝突直前状態を検出する確認センサを含むセンサシステム
本発明に関する少なくとも1つの実施形態において、自動車の衝突直前状態を検出するセンサシステムが提供される。センサシステムは、差し迫った衝突の激しさおよびその衝突までの残り時間の所見を提供する主レーダ装置を含む。確認センサを含む別個の確認検出装置は、確認出力を供給するために自動車に隣接する近場のスペース内を検出する。この主レーダ装置および確認検出装置と通信するのは、電子制御装置である。この装置は、主レーダ出力および確認検出出力の評価に依存して、安全装置に対する展開信号を発生するように構成される。

【発明の詳細な説明】
【技術分野】
【0001】
本発明は、自動車衝突保護システム用センサシステムに関する。
【発明の背景】
【0002】
ここ数十年にわたり、自動車安全システムが高度化し、自動車の乗員保護は劇的に改良されてきた。現在市販されている自動車は、正突、側突、ロールオーバの事態から乗員を保護する膨張拘束系を含む一連のシステムを搭載している。ベルト拘束および自動車インテリアのエネルギ吸収系の発達もまた、安全性の高度化に貢献してきた。これらのシステムの大半は、自動車衝突あるいはロールオーバの事象を検出すると不可逆な手順で展開または作動し、これによって有益な効果を提供している。衝突やロールオーバの事態が発生するとそれを検出するように、現在この種のセンサの大半の設計がなされている。
【0003】
最近では、衝突前のトリガにより展開可能なシステムに注目が向けられてきている。例えば、物体との衝突が差し迫っているとき、衝突前のトリガによりエアバッグは自動車乗員に対する衝突の激しさを低減して展開することが可能である。これは、衝突前のエアバッグシステムの展開の過程において膨張するエアバッグがより良い位置を確保するとともに充分に膨張することで、乗員と自動車との間の力学的相互作用を促進し、効率の良いエネルギ吸収を提供するからである。またこれによって衝突後のライドダウン中や押し潰れ中の自動車乗員に対する負傷の深刻さを低減するからである。
【0004】
衝突前のトリガによる保護システムが適切に動作するためには、頑強で信頼性の高いセンシングシステムが必要である。自動車が衝突し減速している間に安全システムの展開の引き金を引く衝突センサとは異なり、衝突前のトリガによる保護システム用のセンシングシステムは、接触が発生する前に衝突を予期しなければならない。この重要な「衝突前の時間」は、アクチュエータまたは火工装置を機能させる時間(例えば0〜200ミリ秒)、および物体と自動車との間の隙間の距離(例えば0〜800ミリメートル)に関連する。これらのパラメータは、とりわけ側突の事態において重要である。火工安全装置の軽率な展開は、費用が嵩むだけではなく、自動車の一時的な使用不能を招くおそれがある。さらには、大半のシステムの展開は、エネルギを開放することにより達せられるため、不適切な時点での展開はやっかいな結果をもたらす可能性がある。
【0005】
レーダ検出システムは、何年もの間、自動車のために研究され採用されてきた。自動車のレーダシステムは、航空機のそれと次の点で非常に似通った動作をする。すなわち、典型的にはマイクロ波領域の無線周波信号が自動車上のアンテナから発信され反射信号が解析されて反射対象についての情報を明らかにする。このようなシステムは、自動車のブレーキシステムによる衝突の緩和に用いられたり、ドライバの便宜のための機能である障害物検出システムに用いられたりするものとして考えられてきた。レーダセンシングシステムは、非純正品のエアバッグの配備においても順応性を有する場合がある。レーダセンサは、最も接近した物体の距離を高精度で(例えば5cm)検出する能力を含め、多くの価値のある入力を提供する。レーダセンサは、対象への接近速度を高精度で測定し、その出力を供給することも可能である。対象のレーダ断面積およびリターン信号の特性は、その対象を特徴づける手段として用いることも可能である。
【0006】
レーダシステムから得られた情報は価値のあるデータをもたらすが、例えばエアバッグのような火工装置を展開させる単一のレーダセンサ信号を排他的に信頼することは、何らかの悪い結果につながりかねない。とりわけ、単一のセンサ信号に基づく最も単純な履行では、たった1つの間違いが不慮の展開信号を導く可能性がある。
【発明の概要】
【0007】
本発明は、上記段落において論じられた事柄、特に信頼性の高い判定要求に焦点を当てた、衝突前のトリガによる安全システムのためのセンシングシステムに関する。
【0008】
本発明の少なくとも1つの実施形態において、自動車の衝突直前状態を検出するセンサシステムが提供される。そのセンサシステムは、第1の周波数(例えば24Ghzまたは79Ghzのマイクロ波周波数の近く)を検出することにより、複数のレーダ測定値に基づくレーダ出力を供給する、自動車に搭載された主レーダ装置を含んで構成される。そのレーダ測定値に含まれるのは、自動車に対する物体のレーダ距離測定値、レーダ接近速度、角度位置、および物体の反射性またはレーダ断面積の評価である。確認検出装置は、自動車に配置されるマイクロ波動作対象検出器を含む。その確認センサは、自動車に隣接する近場のスペース内にて、第1の周波数より低い第2の周波数(例えば、2.4Ghz、5.8Ghzまたは24Ghzのマイクロ波周波数の範囲)を検出する。確認検出装置は、複数の近場測定値に基づく動作検出出力を供給する。その近場測定値に含まれるのは、自動車に対し近場のスペース内の物体の存在および物体の近場の接近速度である。上記主レーダ装置および上記確認検出装置と通信するのは、電子制御装置である。この装置は、そのレーダ出力およびその確認検出出力の評価に依存して、安全装置に対する展開信号を発生するように構成される。
【0009】
ある側面によれば、上記主レーダ装置は、およそ20Ghzから80Ghzの間の第1の周波数を検出するレーダセンサを含む。上記動作検出センサは、およそ900Mhzから26Ghzの間の第2周波数を検出する。上記レーダ測定値は、レーダ断面積測定値をさらに含む。
【0010】
本発明の上記並びに他の概要および利点は、以下に続く発明の詳細な説明および添付の図面の読解により明らかとなる。
【図面の簡単な説明】
【0011】
【図1】本発明の一実施形態における衝突センサシステムを搭載する代表的な自動車の平面図である。
【0012】
【図2】図1に示した自動車の側面図である。
【0013】
【図3】本発明の一実施形態における衝突センサシステムの平面図である。
【0014】
【図4】図3に示した衝突センサシステムの分解図である。
【0015】
【図5】本発明の一実施形態における衝突センサシステムの斜視図である。
【0016】
【図6】本発明の一実施形態におけるセンサシステムの主レーダ装置に関する信号および判定のフローチャートである。
【0017】
【図7】図7は、本発明の一実施形態におけるセンサシステムの確認検出装置に関する信号および判定のフローチャートである。
【0018】
【図8】図8は、本発明の一実施形態における安全装置を制御するレーダ出力および確認検出出力の統合を説明するフローチャートである。
【発明の詳細な説明】
【0019】
本発明に関する詳細な実施形態をここに開示する。しかし、開示された実施形態は、本発明の例示にすぎず、様々な代替形式に具体化されてよいことを理解されたい。図面は、必ずしも忠実な縮尺ではなく、図面のいくつかは特定の構成部材の詳細を示すよう構成されることがある。したがって、ここに開示される特定の構造および機能的詳細は、限定的に解釈されるのではなく、請求項の代表的基準にすぎず、当業者が本発明を理解するためのものである。
【0020】
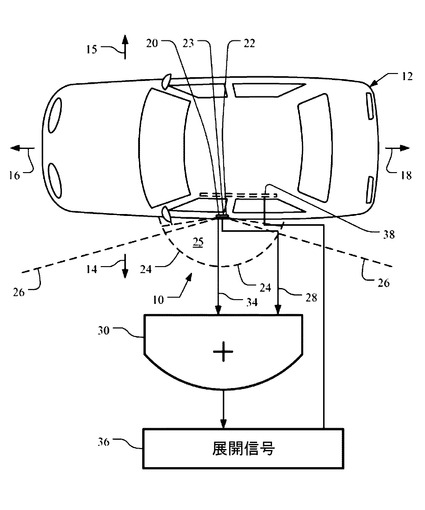
図1を参照すると、センサシステム10が、自動車12とともに示されている。センサシステム10は、自動車12に対して左方向14または右方向15を検出するアプリケーションとして構成される。しかし、センサシステム10は、接近する物体を感知するとともに衝突に自動車12を備えさせる同様の機能を備え、自動車12の前方16または後方18を検出するものとして構成されてもよい。側面方向のアプリケーション14または15において、同じ検出モジュール23に含まれ得るセンサ20および22は、図示するように好ましくは重複する視野24および26を有する。
【0021】
センサシステム10は、好ましくはマイクロ波範囲で、無線周波信号を送受信するように構成されるレーダセンサ22を含む。具体例としては、そのセンサ22は、およそ20Ghzから80Ghzの間の周波数、例えば24Ghz、77Ghzまたは79Ghzの周波数で動作するアンテナトランシーバ装置によって、信号を送受信してよい。レーダセンサ22は、さらに、レーダ出力28を電子制御装置(ECM30)に供給するよう構成される。
【0022】
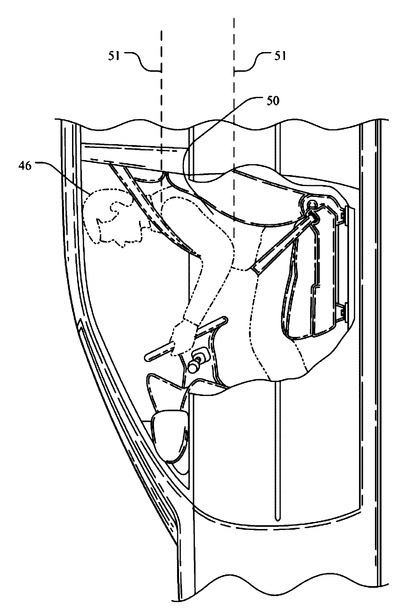
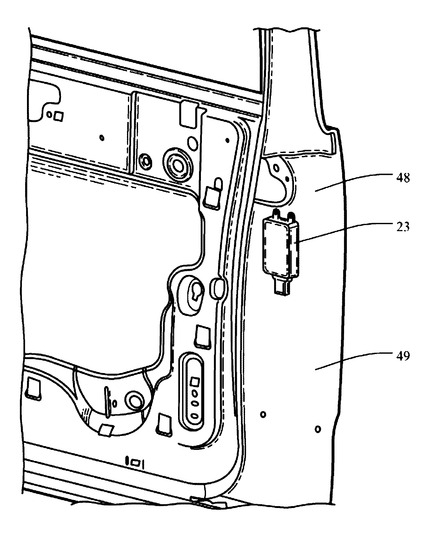
図5にも示すように、レーダセンサ22を含む検出モジュール23は自動車12、例えばドアパネル49の内側の表面やドア48の外装パネルの内側の表面に取り付けられる。物体との衝突の可能性を検出するためにセンサ22によって送受信される無線周波信号が通過するよう、ドアパネル49は誘電材質で形成されるかまたは誘電性の窓を有する。衝突直前状態を検出するレーダセンサ22の取付位置は、自動車12の他の適した位置としてもよい。
【0023】
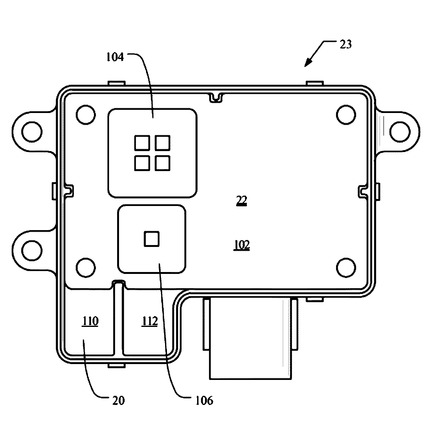
図3および図4にも示すように、検出モジュール23は、レーダ信号を送受信する、複数の受信アレイアンテナ104と送信アンテナ106とを含むレーダ回路基板102を有してよい。一実施形態において、レーダ回路基板102は、マイクロ波発振源(図示せず)、アンプ(図示せず)、ミキサ(図示せず)およびベースバンドコントローラまたは処理装置53(確認センサ参照)をさらに含んでいて、これらは電気的に互いに結合され、アンテナ104および106と通信を行ってレーダ信号の発生、受信、処理をする。当業者に周知である他の適したレーダ感知の構成を採用してもよい。
【0024】
センサシステム10は、近くで動作している物体の存在を検出可能な近場センサとしての確認センサ20をさらに含む。センサ20は、近場の検出信号を送受信するように構成されていて、これら検出信号はマイクロ波範囲または他の適した周波数範囲としてよく、これによって自動車12に隣接する近場のスペース25内にて物体を検出する。具体例としては、確認センサ20は、およそ900Mhzから26Ghzの間の周波数で動作し、例えば2.4GhzMhz、5.8Ghz、および/または5.9Ghzの周波数の場合に費用効果が高い、アンテナトランシーバ装置によって信号を送受信してよい。好ましくは、確認センサ20は、レーダセンサ22より低い周波数で動作する。特に、高周波数は、政府規則によればより広い帯域幅が認められていて、また距離、方位角(アジマス角)、対象物の速度に関してより正確な測定値に変換する小型のアンテナアパーチャを採用できる。低周波数は、アンテナサイズおよび帯域幅の制限により、おおよその距離や接近速度を明示するにすぎない。低周波数は、低コストの利点があり、今にも衝突しそうな物体の近距離での検出によく適している。確認センサ20は、さらに、動作対象検出出力または確認検出出力34をECM30へ供給するよう構成される。
【0025】
一例において、確認センサ20は、下記にてより詳しく説明するマイクロプロセッサと通信し、信号波の変調を用いて近場の動作物体の存在を検出する間、外部ソースからの潜在的な妨害を排除することができる。その変調は、振幅変調(パルス)または周波数変調(無変調連続波または周波数偏位変調)としてよい。例えば、確認センサ20は、オンオフ変調(OOK)振幅変調を用いてもよいし、当業者に周知の他の適した変調方式を用いてもよい。他の方式として例えば振幅変位変調(ASK)、周波数偏位変調(FSK)または位相変位変調(PSK)が挙げられるが、これらに限られない。
【0026】
少なくとも1つの実施形態において、確認センサ20は検出モジュール23に含まれる。好ましくは、確認センサ20およびレーダセンサ22は、互いの視野24および26の各部分をシェアするように、互いに関連を持って配置される。一例としては、図1に示すように、近場のスペース25を通過し自動車12の外側に向かう検出視野26を有する主レーダセンサ22のように、確認センサ20および主レーダセンサ22が自動車12に配置される。また図2に示すように、検出モジュール23は、近場の視野24が自動車の乗員46の胸部50に対応する高さ51において自動車12のドア48の直近部分をカバーする近場のスペース25を形成するように配置されるとよい。この筋書によれば、乗員46の対象保護エリア付近に確認センサ20を配置することにより、側突における乗員46に対する保護の強化が提供される。
【0027】
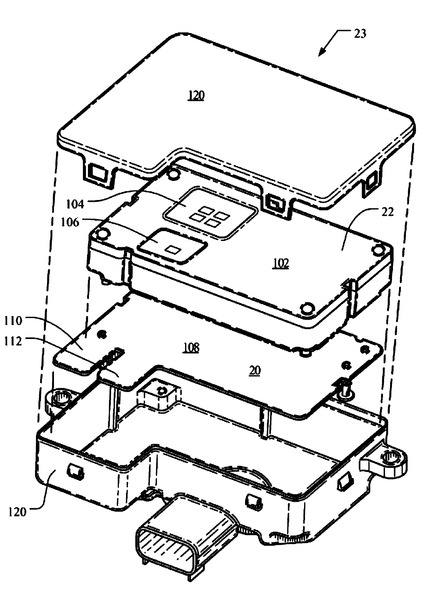
確認センサ20は近場検出回路基板108上に備えつけられ、送信アンテナ110および受信アンテナ112を含む。好ましくは、アンテナ110および112はパッチまたは表面実装アンテナとするとよく、これらであればより簡単にパッケージングでき回路基板108に組み込みやすい。あるいは回路基板108が、信号の送受信用の単一のアンテナを有していてもよい。一例において、1つの2.4Ghzまたは5.8Ghzの単一パッチ(図示せず)は、確認センサ20用の1つの送受信アンテナとして機能し、またレーダセンサ22用の24Ghz送信アンテナ用の接地面として機能する。単一パッチアンテナは、多層PCBの構造におけるレーダセンサ用の送信アンテナの背後に配置され、これによって、よりコンパクトな検出パッケージが可能となる。かかるパッケージは、例えば自動車のドアにある20ミリメートル×30ミリメートルだけの検出窓しか必要としない(図5参照)。
【0028】
回路基板108は、また、内蔵型アナログトランシーバなどのトランシーバ(図示せず)、および専用マイクロプロセッサ118またはマイクロコントローラ(図7参照)を含んでよい。そのトランシーバは、近場の検出信号を発生、受信するアンテナ110および112と通信する。マイクロプロセッサ118は、そのトランシーバと電気的に結合し、トランシーバを制御するように構成され、近場のスペース25内で近場測定値を得る。一例において、マイクロプロセッサ118は、電圧制御発振器(図示せず)またはスイッチ(図示せず)を介して近場の検出信号を変調し、これによって物体の距離および速度を判定する。
【0029】
検出モジュール23は、また、回路基板102および108を収容する筐体120を含む。筐体120は、環境の保護およびセンサ20、22を自動車12に取り付ける手段を提供してよい。
【0030】
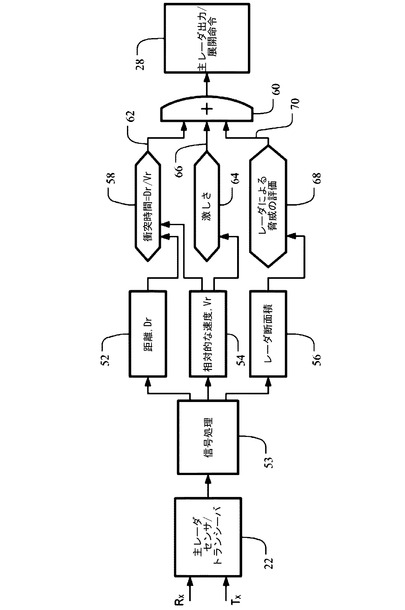
図6には、レーダセンサ22に関する信号および判定のフローチャートを示す。レーダセンサ22は例えば、信号プロセッサ53を介して、物体に反射する無線周波信号を解析し、距離測定値52、接近速度54、方位角(水平アジマス角)およびレーダ断面積56を得る。
【0031】
衝突時間の推定値58は、距離測定値52、方位角(水平アジマス)測定値、および接近速度54の入力を処理するトラッキングアルゴリズムによって計算される。距離測定値52は、物体と自動車12との間の距離である。レーダセンサ22は、典型的には5cm以内で、高精度で距離情報を提供する。接近速度54は、物体と自動車12との間の相対的な速度である。例えば水平方位角やアジマス角の角度測定値は、2つの受信チャンネル間の位相および/または振幅の比較による大きさである。角度測定値は、自車に対して障害となるものの軌跡を評価するのに役立つ。衝突時間の推定値58は、入力62をたどってブロック60に供給される。衝突時間の推定値58は、安全装置38を展開するために必要な時間と比較される。安全装置38は、例えば、エアバッグ、カーテンエアバッグ、ドア48内の火工装置、シートベルトプリテンショナ、ブレーキアクチュエータまたは乗員46を保護する何らかの他の火工装置としてよい。典型的には、サイドエアバッグの展開時間は、10ミリ秒から50ミリ秒の間となる。
【0032】
接近速度54は、ブロック64に記載されるように、衝突の激しさを判定するためにも用いられる。高い接近速度はより激しい衝突に結びつき、一方、低い接近速度はより激しさの少ない衝突に結びつく。衝突の激しさの算定結果は、入力66としてブロック60に供給される。
【0033】
レーダ断面積56は、反射無線周波信号の強度の大きさである。反射信号の強度は、概して、物体のサイズや形状に関係づけられる。そのサイズおよび形状は、ブロック68に記載されるように、物体の脅威を評価するために用いられる。ブロック68における脅威の評価は、入力70としてブロック60に供給される。ECM30のブロック60は、衝突時間58、衝突の激しさ64および脅威の評価68を処理して、これらの入力が物体との衝突直前状態を示す予め定められた基準を満たす時、展開命令を指示するレーダ出力28を供給する。
【0034】
図7には、確認センサ20の情報の処理に関する信号および判定のフローチャートが示されている。確認センサ20は通信装置116を含んでよいし、および/または通信装置116と通信してよい。通信装置116は、自動車に対する通信アプリケーションおよび確認機能である。一例において、確認センサ20は、2.4Ghz前後で動作するトランシーバを有する。
【0035】
マイクロプロセッサ118は、また、確認センサ20のトランシーバと通信し、複数の近場測定値に基づいた確認検出出力34を供給する。その近場測定値に含まれるのは、自動車12に対し近場のスペース内の物体の存在の測定72、および物体の近場の接近速度76である。
【0036】
近場のスペース内の物体の存在の測定72は、近場のスペース25内に物体が存在し検出されるかを指し示す。近場のスペース25はセンサ20の公称範囲、すなわち、確認センサ20が検出可能な最大距離により定められてよい。あるいは、近場のスペース25は、センサ20の公称範囲を下回る予め定められた距離に限られてもよい。その予め定められた距離は、マイクロプロセッサ118のプログラムに入れられ、さもなければマイクロプロセッサ118に伝達されてよい。物体の存在の測定72は、入力86としてブロック82に供給される。近場の接近速度76もまた判定され、入力86としてブロック82に供給される。ECM30のブロック82は、物体の存在の測定72および近場の接近速度76を処理して、これらの入力が物体との衝突が起きる確認のために予め定められた基準を満たす時、確認信号を指示する近場の検出出力34を供給する。
【0037】
一例において、確認センサ20および/またはマイクロプロセッサ118は、物体の物理的なサイズを指し示す近場の反射信号の特性を利用してもよい。この筋書によれば、物体のサイズが小さすぎるために物体との衝突が実質的に自動車12に損傷を与えなさそうな場合に、物体の存在の測定72を無視し展開信号が発せられなくてよいかどうかを判定するために、物体の物理的サイズが用いられてよい。
【0038】
図8では、展開信号36を供給するレーダ出力28および近場の検出出力34の統合を説明する。一例において、レーダ出力28および近場の検出出力34は、もっぱら、展開信号36を発するかどうかを判定するために用いられる。例えば、ECM30は、展開信号36を発生するために、ブロック80においてセンサ20、22の両方からの判定出力を検討し、展開の決定に到るための基礎機能を適用する。ECM30は、レーダ出力28が衝突直前状態を指示し、確認検出出力34が衝突直前状態を確認し、衝突直前状態の判定の信頼性が増した時にのみ、展開信号36を発するようにプログラムしてよい。
【0039】
あるいは、レーダ出力28および確認検出出力34は、例えば自動車速度、ヨーレート、操舵角および操舵レートを含むことが可能な自動車パラメータ90と共に検討してもよい。自動車パラメータ90は、レーダ出力28および確認検出出力34と共同的に評価され、展開信号36を発する判定の信頼性を高める。
【0040】
少なくとも1つの実施形態において、展開命令は、少なくとも毎秒約10メートルのレーダ接近速度54と、約50ミリ秒よりも少ない衝突時間58とを有するレーダ測定値に対応する。衝突時間58は、レーダ距離測定値52およびレーダ接近速度54を用いて評価される。確認信号は、少なくとも毎時約10キロメートルの接近速度76を有し、物体が近場のスペース25内に存在することを指し示す近場測定値に対応する。近場のスペース25は、自動車12に配置されるセンサ20から約1メートルまたはそれ以下の外周を有する。特に、近場のスペース25があまりにも大きすぎると、衝突直前状態の判定の信頼性を低下させ、一方、近場のスペース25があまりにも小さすぎると、衝突に先立って安全装置38の引き金を引くのに利用できる時間を減少させるおそれがある。
【0041】
他の実施形態では、本文で説明した1もしくはそれ以上の装置を実行するために、特定用途向け集積回路、プログラマブルロジックアレイおよび他のハードウェア装置などの専用ハードウェアの実行を含めてもよい。センサおよび様々な実施形態に関する装置を含むことが可能なアプリケーションは、種々の電子システムおよびコンピュータシステムを広く含むことができる。本文で説明した1もしくはそれ以上の実施形態は、モジュール間およびモジュールを介して通信可能な、関連制御信号およびデータ信号を伴う、2もしくはそれ以上の特定の相互接続ハードウェアモジュールあるいは装置、または特定用途向け集積回路の各部分を用いる機能を実行してよい。したがって、本システムは、ソフトウェア、ファームウェアおよびハードウェアの実行を含んでいる。
【0042】
当業者は容易にわかるように、上述の記載は、本発明の原理の具体的な実例を説明したものである。本文は、本発明の用途の範囲を限定するものではなく、本発明は、請求項に記載の思想から逸脱することなく、改良、変化、修正の余地がある。
【技術分野】
【0001】
本発明は、自動車衝突保護システム用センサシステムに関する。
【発明の背景】
【0002】
ここ数十年にわたり、自動車安全システムが高度化し、自動車の乗員保護は劇的に改良されてきた。現在市販されている自動車は、正突、側突、ロールオーバの事態から乗員を保護する膨張拘束系を含む一連のシステムを搭載している。ベルト拘束および自動車インテリアのエネルギ吸収系の発達もまた、安全性の高度化に貢献してきた。これらのシステムの大半は、自動車衝突あるいはロールオーバの事象を検出すると不可逆な手順で展開または作動し、これによって有益な効果を提供している。衝突やロールオーバの事態が発生するとそれを検出するように、現在この種のセンサの大半の設計がなされている。
【0003】
最近では、衝突前のトリガにより展開可能なシステムに注目が向けられてきている。例えば、物体との衝突が差し迫っているとき、衝突前のトリガによりエアバッグは自動車乗員に対する衝突の激しさを低減して展開することが可能である。これは、衝突前のエアバッグシステムの展開の過程において膨張するエアバッグがより良い位置を確保するとともに充分に膨張することで、乗員と自動車との間の力学的相互作用を促進し、効率の良いエネルギ吸収を提供するからである。またこれによって衝突後のライドダウン中や押し潰れ中の自動車乗員に対する負傷の深刻さを低減するからである。
【0004】
衝突前のトリガによる保護システムが適切に動作するためには、頑強で信頼性の高いセンシングシステムが必要である。自動車が衝突し減速している間に安全システムの展開の引き金を引く衝突センサとは異なり、衝突前のトリガによる保護システム用のセンシングシステムは、接触が発生する前に衝突を予期しなければならない。この重要な「衝突前の時間」は、アクチュエータまたは火工装置を機能させる時間(例えば0〜200ミリ秒)、および物体と自動車との間の隙間の距離(例えば0〜800ミリメートル)に関連する。これらのパラメータは、とりわけ側突の事態において重要である。火工安全装置の軽率な展開は、費用が嵩むだけではなく、自動車の一時的な使用不能を招くおそれがある。さらには、大半のシステムの展開は、エネルギを開放することにより達せられるため、不適切な時点での展開はやっかいな結果をもたらす可能性がある。
【0005】
レーダ検出システムは、何年もの間、自動車のために研究され採用されてきた。自動車のレーダシステムは、航空機のそれと次の点で非常に似通った動作をする。すなわち、典型的にはマイクロ波領域の無線周波信号が自動車上のアンテナから発信され反射信号が解析されて反射対象についての情報を明らかにする。このようなシステムは、自動車のブレーキシステムによる衝突の緩和に用いられたり、ドライバの便宜のための機能である障害物検出システムに用いられたりするものとして考えられてきた。レーダセンシングシステムは、非純正品のエアバッグの配備においても順応性を有する場合がある。レーダセンサは、最も接近した物体の距離を高精度で(例えば5cm)検出する能力を含め、多くの価値のある入力を提供する。レーダセンサは、対象への接近速度を高精度で測定し、その出力を供給することも可能である。対象のレーダ断面積およびリターン信号の特性は、その対象を特徴づける手段として用いることも可能である。
【0006】
レーダシステムから得られた情報は価値のあるデータをもたらすが、例えばエアバッグのような火工装置を展開させる単一のレーダセンサ信号を排他的に信頼することは、何らかの悪い結果につながりかねない。とりわけ、単一のセンサ信号に基づく最も単純な履行では、たった1つの間違いが不慮の展開信号を導く可能性がある。
【発明の概要】
【0007】
本発明は、上記段落において論じられた事柄、特に信頼性の高い判定要求に焦点を当てた、衝突前のトリガによる安全システムのためのセンシングシステムに関する。
【0008】
本発明の少なくとも1つの実施形態において、自動車の衝突直前状態を検出するセンサシステムが提供される。そのセンサシステムは、第1の周波数(例えば24Ghzまたは79Ghzのマイクロ波周波数の近く)を検出することにより、複数のレーダ測定値に基づくレーダ出力を供給する、自動車に搭載された主レーダ装置を含んで構成される。そのレーダ測定値に含まれるのは、自動車に対する物体のレーダ距離測定値、レーダ接近速度、角度位置、および物体の反射性またはレーダ断面積の評価である。確認検出装置は、自動車に配置されるマイクロ波動作対象検出器を含む。その確認センサは、自動車に隣接する近場のスペース内にて、第1の周波数より低い第2の周波数(例えば、2.4Ghz、5.8Ghzまたは24Ghzのマイクロ波周波数の範囲)を検出する。確認検出装置は、複数の近場測定値に基づく動作検出出力を供給する。その近場測定値に含まれるのは、自動車に対し近場のスペース内の物体の存在および物体の近場の接近速度である。上記主レーダ装置および上記確認検出装置と通信するのは、電子制御装置である。この装置は、そのレーダ出力およびその確認検出出力の評価に依存して、安全装置に対する展開信号を発生するように構成される。
【0009】
ある側面によれば、上記主レーダ装置は、およそ20Ghzから80Ghzの間の第1の周波数を検出するレーダセンサを含む。上記動作検出センサは、およそ900Mhzから26Ghzの間の第2周波数を検出する。上記レーダ測定値は、レーダ断面積測定値をさらに含む。
【0010】
本発明の上記並びに他の概要および利点は、以下に続く発明の詳細な説明および添付の図面の読解により明らかとなる。
【図面の簡単な説明】
【0011】
【図1】本発明の一実施形態における衝突センサシステムを搭載する代表的な自動車の平面図である。
【0012】
【図2】図1に示した自動車の側面図である。
【0013】
【図3】本発明の一実施形態における衝突センサシステムの平面図である。
【0014】
【図4】図3に示した衝突センサシステムの分解図である。
【0015】
【図5】本発明の一実施形態における衝突センサシステムの斜視図である。
【0016】
【図6】本発明の一実施形態におけるセンサシステムの主レーダ装置に関する信号および判定のフローチャートである。
【0017】
【図7】図7は、本発明の一実施形態におけるセンサシステムの確認検出装置に関する信号および判定のフローチャートである。
【0018】
【図8】図8は、本発明の一実施形態における安全装置を制御するレーダ出力および確認検出出力の統合を説明するフローチャートである。
【発明の詳細な説明】
【0019】
本発明に関する詳細な実施形態をここに開示する。しかし、開示された実施形態は、本発明の例示にすぎず、様々な代替形式に具体化されてよいことを理解されたい。図面は、必ずしも忠実な縮尺ではなく、図面のいくつかは特定の構成部材の詳細を示すよう構成されることがある。したがって、ここに開示される特定の構造および機能的詳細は、限定的に解釈されるのではなく、請求項の代表的基準にすぎず、当業者が本発明を理解するためのものである。
【0020】
図1を参照すると、センサシステム10が、自動車12とともに示されている。センサシステム10は、自動車12に対して左方向14または右方向15を検出するアプリケーションとして構成される。しかし、センサシステム10は、接近する物体を感知するとともに衝突に自動車12を備えさせる同様の機能を備え、自動車12の前方16または後方18を検出するものとして構成されてもよい。側面方向のアプリケーション14または15において、同じ検出モジュール23に含まれ得るセンサ20および22は、図示するように好ましくは重複する視野24および26を有する。
【0021】
センサシステム10は、好ましくはマイクロ波範囲で、無線周波信号を送受信するように構成されるレーダセンサ22を含む。具体例としては、そのセンサ22は、およそ20Ghzから80Ghzの間の周波数、例えば24Ghz、77Ghzまたは79Ghzの周波数で動作するアンテナトランシーバ装置によって、信号を送受信してよい。レーダセンサ22は、さらに、レーダ出力28を電子制御装置(ECM30)に供給するよう構成される。
【0022】
図5にも示すように、レーダセンサ22を含む検出モジュール23は自動車12、例えばドアパネル49の内側の表面やドア48の外装パネルの内側の表面に取り付けられる。物体との衝突の可能性を検出するためにセンサ22によって送受信される無線周波信号が通過するよう、ドアパネル49は誘電材質で形成されるかまたは誘電性の窓を有する。衝突直前状態を検出するレーダセンサ22の取付位置は、自動車12の他の適した位置としてもよい。
【0023】
図3および図4にも示すように、検出モジュール23は、レーダ信号を送受信する、複数の受信アレイアンテナ104と送信アンテナ106とを含むレーダ回路基板102を有してよい。一実施形態において、レーダ回路基板102は、マイクロ波発振源(図示せず)、アンプ(図示せず)、ミキサ(図示せず)およびベースバンドコントローラまたは処理装置53(確認センサ参照)をさらに含んでいて、これらは電気的に互いに結合され、アンテナ104および106と通信を行ってレーダ信号の発生、受信、処理をする。当業者に周知である他の適したレーダ感知の構成を採用してもよい。
【0024】
センサシステム10は、近くで動作している物体の存在を検出可能な近場センサとしての確認センサ20をさらに含む。センサ20は、近場の検出信号を送受信するように構成されていて、これら検出信号はマイクロ波範囲または他の適した周波数範囲としてよく、これによって自動車12に隣接する近場のスペース25内にて物体を検出する。具体例としては、確認センサ20は、およそ900Mhzから26Ghzの間の周波数で動作し、例えば2.4GhzMhz、5.8Ghz、および/または5.9Ghzの周波数の場合に費用効果が高い、アンテナトランシーバ装置によって信号を送受信してよい。好ましくは、確認センサ20は、レーダセンサ22より低い周波数で動作する。特に、高周波数は、政府規則によればより広い帯域幅が認められていて、また距離、方位角(アジマス角)、対象物の速度に関してより正確な測定値に変換する小型のアンテナアパーチャを採用できる。低周波数は、アンテナサイズおよび帯域幅の制限により、おおよその距離や接近速度を明示するにすぎない。低周波数は、低コストの利点があり、今にも衝突しそうな物体の近距離での検出によく適している。確認センサ20は、さらに、動作対象検出出力または確認検出出力34をECM30へ供給するよう構成される。
【0025】
一例において、確認センサ20は、下記にてより詳しく説明するマイクロプロセッサと通信し、信号波の変調を用いて近場の動作物体の存在を検出する間、外部ソースからの潜在的な妨害を排除することができる。その変調は、振幅変調(パルス)または周波数変調(無変調連続波または周波数偏位変調)としてよい。例えば、確認センサ20は、オンオフ変調(OOK)振幅変調を用いてもよいし、当業者に周知の他の適した変調方式を用いてもよい。他の方式として例えば振幅変位変調(ASK)、周波数偏位変調(FSK)または位相変位変調(PSK)が挙げられるが、これらに限られない。
【0026】
少なくとも1つの実施形態において、確認センサ20は検出モジュール23に含まれる。好ましくは、確認センサ20およびレーダセンサ22は、互いの視野24および26の各部分をシェアするように、互いに関連を持って配置される。一例としては、図1に示すように、近場のスペース25を通過し自動車12の外側に向かう検出視野26を有する主レーダセンサ22のように、確認センサ20および主レーダセンサ22が自動車12に配置される。また図2に示すように、検出モジュール23は、近場の視野24が自動車の乗員46の胸部50に対応する高さ51において自動車12のドア48の直近部分をカバーする近場のスペース25を形成するように配置されるとよい。この筋書によれば、乗員46の対象保護エリア付近に確認センサ20を配置することにより、側突における乗員46に対する保護の強化が提供される。
【0027】
確認センサ20は近場検出回路基板108上に備えつけられ、送信アンテナ110および受信アンテナ112を含む。好ましくは、アンテナ110および112はパッチまたは表面実装アンテナとするとよく、これらであればより簡単にパッケージングでき回路基板108に組み込みやすい。あるいは回路基板108が、信号の送受信用の単一のアンテナを有していてもよい。一例において、1つの2.4Ghzまたは5.8Ghzの単一パッチ(図示せず)は、確認センサ20用の1つの送受信アンテナとして機能し、またレーダセンサ22用の24Ghz送信アンテナ用の接地面として機能する。単一パッチアンテナは、多層PCBの構造におけるレーダセンサ用の送信アンテナの背後に配置され、これによって、よりコンパクトな検出パッケージが可能となる。かかるパッケージは、例えば自動車のドアにある20ミリメートル×30ミリメートルだけの検出窓しか必要としない(図5参照)。
【0028】
回路基板108は、また、内蔵型アナログトランシーバなどのトランシーバ(図示せず)、および専用マイクロプロセッサ118またはマイクロコントローラ(図7参照)を含んでよい。そのトランシーバは、近場の検出信号を発生、受信するアンテナ110および112と通信する。マイクロプロセッサ118は、そのトランシーバと電気的に結合し、トランシーバを制御するように構成され、近場のスペース25内で近場測定値を得る。一例において、マイクロプロセッサ118は、電圧制御発振器(図示せず)またはスイッチ(図示せず)を介して近場の検出信号を変調し、これによって物体の距離および速度を判定する。
【0029】
検出モジュール23は、また、回路基板102および108を収容する筐体120を含む。筐体120は、環境の保護およびセンサ20、22を自動車12に取り付ける手段を提供してよい。
【0030】
図6には、レーダセンサ22に関する信号および判定のフローチャートを示す。レーダセンサ22は例えば、信号プロセッサ53を介して、物体に反射する無線周波信号を解析し、距離測定値52、接近速度54、方位角(水平アジマス角)およびレーダ断面積56を得る。
【0031】
衝突時間の推定値58は、距離測定値52、方位角(水平アジマス)測定値、および接近速度54の入力を処理するトラッキングアルゴリズムによって計算される。距離測定値52は、物体と自動車12との間の距離である。レーダセンサ22は、典型的には5cm以内で、高精度で距離情報を提供する。接近速度54は、物体と自動車12との間の相対的な速度である。例えば水平方位角やアジマス角の角度測定値は、2つの受信チャンネル間の位相および/または振幅の比較による大きさである。角度測定値は、自車に対して障害となるものの軌跡を評価するのに役立つ。衝突時間の推定値58は、入力62をたどってブロック60に供給される。衝突時間の推定値58は、安全装置38を展開するために必要な時間と比較される。安全装置38は、例えば、エアバッグ、カーテンエアバッグ、ドア48内の火工装置、シートベルトプリテンショナ、ブレーキアクチュエータまたは乗員46を保護する何らかの他の火工装置としてよい。典型的には、サイドエアバッグの展開時間は、10ミリ秒から50ミリ秒の間となる。
【0032】
接近速度54は、ブロック64に記載されるように、衝突の激しさを判定するためにも用いられる。高い接近速度はより激しい衝突に結びつき、一方、低い接近速度はより激しさの少ない衝突に結びつく。衝突の激しさの算定結果は、入力66としてブロック60に供給される。
【0033】
レーダ断面積56は、反射無線周波信号の強度の大きさである。反射信号の強度は、概して、物体のサイズや形状に関係づけられる。そのサイズおよび形状は、ブロック68に記載されるように、物体の脅威を評価するために用いられる。ブロック68における脅威の評価は、入力70としてブロック60に供給される。ECM30のブロック60は、衝突時間58、衝突の激しさ64および脅威の評価68を処理して、これらの入力が物体との衝突直前状態を示す予め定められた基準を満たす時、展開命令を指示するレーダ出力28を供給する。
【0034】
図7には、確認センサ20の情報の処理に関する信号および判定のフローチャートが示されている。確認センサ20は通信装置116を含んでよいし、および/または通信装置116と通信してよい。通信装置116は、自動車に対する通信アプリケーションおよび確認機能である。一例において、確認センサ20は、2.4Ghz前後で動作するトランシーバを有する。
【0035】
マイクロプロセッサ118は、また、確認センサ20のトランシーバと通信し、複数の近場測定値に基づいた確認検出出力34を供給する。その近場測定値に含まれるのは、自動車12に対し近場のスペース内の物体の存在の測定72、および物体の近場の接近速度76である。
【0036】
近場のスペース内の物体の存在の測定72は、近場のスペース25内に物体が存在し検出されるかを指し示す。近場のスペース25はセンサ20の公称範囲、すなわち、確認センサ20が検出可能な最大距離により定められてよい。あるいは、近場のスペース25は、センサ20の公称範囲を下回る予め定められた距離に限られてもよい。その予め定められた距離は、マイクロプロセッサ118のプログラムに入れられ、さもなければマイクロプロセッサ118に伝達されてよい。物体の存在の測定72は、入力86としてブロック82に供給される。近場の接近速度76もまた判定され、入力86としてブロック82に供給される。ECM30のブロック82は、物体の存在の測定72および近場の接近速度76を処理して、これらの入力が物体との衝突が起きる確認のために予め定められた基準を満たす時、確認信号を指示する近場の検出出力34を供給する。
【0037】
一例において、確認センサ20および/またはマイクロプロセッサ118は、物体の物理的なサイズを指し示す近場の反射信号の特性を利用してもよい。この筋書によれば、物体のサイズが小さすぎるために物体との衝突が実質的に自動車12に損傷を与えなさそうな場合に、物体の存在の測定72を無視し展開信号が発せられなくてよいかどうかを判定するために、物体の物理的サイズが用いられてよい。
【0038】
図8では、展開信号36を供給するレーダ出力28および近場の検出出力34の統合を説明する。一例において、レーダ出力28および近場の検出出力34は、もっぱら、展開信号36を発するかどうかを判定するために用いられる。例えば、ECM30は、展開信号36を発生するために、ブロック80においてセンサ20、22の両方からの判定出力を検討し、展開の決定に到るための基礎機能を適用する。ECM30は、レーダ出力28が衝突直前状態を指示し、確認検出出力34が衝突直前状態を確認し、衝突直前状態の判定の信頼性が増した時にのみ、展開信号36を発するようにプログラムしてよい。
【0039】
あるいは、レーダ出力28および確認検出出力34は、例えば自動車速度、ヨーレート、操舵角および操舵レートを含むことが可能な自動車パラメータ90と共に検討してもよい。自動車パラメータ90は、レーダ出力28および確認検出出力34と共同的に評価され、展開信号36を発する判定の信頼性を高める。
【0040】
少なくとも1つの実施形態において、展開命令は、少なくとも毎秒約10メートルのレーダ接近速度54と、約50ミリ秒よりも少ない衝突時間58とを有するレーダ測定値に対応する。衝突時間58は、レーダ距離測定値52およびレーダ接近速度54を用いて評価される。確認信号は、少なくとも毎時約10キロメートルの接近速度76を有し、物体が近場のスペース25内に存在することを指し示す近場測定値に対応する。近場のスペース25は、自動車12に配置されるセンサ20から約1メートルまたはそれ以下の外周を有する。特に、近場のスペース25があまりにも大きすぎると、衝突直前状態の判定の信頼性を低下させ、一方、近場のスペース25があまりにも小さすぎると、衝突に先立って安全装置38の引き金を引くのに利用できる時間を減少させるおそれがある。
【0041】
他の実施形態では、本文で説明した1もしくはそれ以上の装置を実行するために、特定用途向け集積回路、プログラマブルロジックアレイおよび他のハードウェア装置などの専用ハードウェアの実行を含めてもよい。センサおよび様々な実施形態に関する装置を含むことが可能なアプリケーションは、種々の電子システムおよびコンピュータシステムを広く含むことができる。本文で説明した1もしくはそれ以上の実施形態は、モジュール間およびモジュールを介して通信可能な、関連制御信号およびデータ信号を伴う、2もしくはそれ以上の特定の相互接続ハードウェアモジュールあるいは装置、または特定用途向け集積回路の各部分を用いる機能を実行してよい。したがって、本システムは、ソフトウェア、ファームウェアおよびハードウェアの実行を含んでいる。
【0042】
当業者は容易にわかるように、上述の記載は、本発明の原理の具体的な実例を説明したものである。本文は、本発明の用途の範囲を限定するものではなく、本発明は、請求項に記載の思想から逸脱することなく、改良、変化、修正の余地がある。
【特許請求の範囲】
【請求項1】
自動車の衝突直前状態を検出するセンサシステムにおいて、
第1の周波数を検出することにより、前記自動車に対する物体のレーダ距離測定値、角度位置、およびレーダ接近速度を含む複数のレーダ測定値に基づくレーダ出力を供給する、前記自動車に搭載された主レーダ装置と、
前記自動車に隣接する近場のスペース内にて第1の周波数より低い第2の周波数を検出する前記自動車に配置された確認センサを含み、近場のスペース内の前記物体の存在および該物体の近場の接近速度を含む複数の近場測定値に基づく確認検出出力を前記自動車に対し供給する確認検出装置と、
前記主レーダ装置および前記確認検出装置と通信して安全装置に対する展開信号を発生するように構成された電子制御装置であって、前記展開信号の発生および衝突直前状態の検出の信頼性を高めるために、前記レーダ出力を展開命令として使用し、前記確認検出出力を確認信号として使用し、前記レーダ出力および前記確認検出出力の評価に依存して前記展開信号を発生する電子制御装置と、
を含むことを特徴とするセンサシステム。
【請求項2】
請求項1に記載のセンサシステムにおいて、前記展開命令が前記レーダ測定値に対応し、該レーダ測定値は、少なくとも毎秒約3メートルの前記レーダ接近速度と、前記レーダ距離測定値および該レーダ接近速度を用いて評価される約50ミリ秒よりも少ない衝突時間とを有することを特徴とするセンサシステム。
【請求項3】
請求項2に記載のセンサシステムにおいて、前記確認信号が前記近場測定値に対応し、該近場測定値は、少なくとも毎秒約3メートルの前記近場の接近速度を有し、前記物体が前記近場のスペース内に存在することを指し示すことを特徴とするセンサシステム。
【請求項4】
請求項1に記載のセンサシステムにおいて、前記確認センサが、前記近場のスペースの外周を規定する約3メートルまたはそれ以下の公称範囲を有することを特徴とするセンサシステム。
【請求項5】
請求項1に記載のセンサシステムにおいて、前記主レーダ装置が、およそ20GHzから80GHzの間の周波数で動作し前記レーダ測定値を導出するレーダセンサを含み、前記確認センサが、およそ900MHzから26GHzの間の周波数で動作し前記近場測定値を導出することを特徴とするセンサシステム。
【請求項6】
請求項1に記載のセンサシステムにおいて、前記確認センサが、少なくとも1つの近接アンテナに有効に接続する動作対象検出トランシーバと、前記少なくとも1つの近接アンテナを通じて検出信号を送受信する前記動作対象検出トランシーバを制御するように構成されて前記近場測定値を導出するマイクロプロセッサと、を含むことを特徴とするセンサシステム。
【請求項7】
請求項6に記載のセンサシステムにおいて、前記主レーダ装置がレーダセンサを含み、該レーダセンサは、前記確認センサと協同的に前記自動車に配置され、これによって前記近場のスペースを通過して自動車の外側を検出することを特徴とするセンサシステム。
【請求項8】
請求項6に記載のセンサシステムにおいて、前記レーダセンサが、少なくとも1つのレーダアンテナに有効に接続するレーダトランシーバと、少なくとも1つのレーダアンテナを通じてレーダ信号を送受信する前記レーダトランシーバを制御するように構成されて前記レーダ測定値を導出するレーダ信号マイクロプロセッサと、を含み、前記少なくとも1つのレーダアンテナおよび前記少なくとも1つの近接アンテナが同じ検出モジュールの一部であることを特徴とするセンサシステム。
【請求項9】
請求項8に記載のセンサシステムにおいて、前記検出モジュールが、前記自動車のドアに取り付けられることを特徴とするセンサシステム。
【請求項10】
請求項1に記載のセンサシステムにおいて、前記安全装置が、エアバッグ、カーテンエアバッグ、自動車のドア内の火工装置、シートベルトプリテンショナおよびブレーキアクチュエータのうちの1つであることを特徴とするセンサシステム。
【請求項11】
請求項1に記載のセンサシステムにおいて、前記レーダ測定値が、前記物体のレーダ断面積測定値をさらに含むことを特徴とするセンサシステム。
【請求項12】
請求項1に記載のセンサシステムにおいて、前記電子制御装置が、自動車パラメータに基づいて前記展開信号を発生し、該自動車パラメータは、自動車速度およびヨーレートの値のうちの少なくとも1つを含むことを特徴とするセンサシステム。
【請求項13】
請求項1に記載のセンサシステムにおいて、前記展開命令が前記レーダ測定値に対応し、該レーダ測定値は、少なくとも約1m2の前記レーダ断面積と、少なくとも毎秒約3メートルの前記レーダ接近速度と、前記レーダ距離測定値および該レーダ接近速度を用いて評価される約50ミリ秒よりも少ない衝突時間と、を有することを特徴とするセンサシステム。
【請求項1】
自動車の衝突直前状態を検出するセンサシステムにおいて、
第1の周波数を検出することにより、前記自動車に対する物体のレーダ距離測定値、角度位置、およびレーダ接近速度を含む複数のレーダ測定値に基づくレーダ出力を供給する、前記自動車に搭載された主レーダ装置と、
前記自動車に隣接する近場のスペース内にて第1の周波数より低い第2の周波数を検出する前記自動車に配置された確認センサを含み、近場のスペース内の前記物体の存在および該物体の近場の接近速度を含む複数の近場測定値に基づく確認検出出力を前記自動車に対し供給する確認検出装置と、
前記主レーダ装置および前記確認検出装置と通信して安全装置に対する展開信号を発生するように構成された電子制御装置であって、前記展開信号の発生および衝突直前状態の検出の信頼性を高めるために、前記レーダ出力を展開命令として使用し、前記確認検出出力を確認信号として使用し、前記レーダ出力および前記確認検出出力の評価に依存して前記展開信号を発生する電子制御装置と、
を含むことを特徴とするセンサシステム。
【請求項2】
請求項1に記載のセンサシステムにおいて、前記展開命令が前記レーダ測定値に対応し、該レーダ測定値は、少なくとも毎秒約3メートルの前記レーダ接近速度と、前記レーダ距離測定値および該レーダ接近速度を用いて評価される約50ミリ秒よりも少ない衝突時間とを有することを特徴とするセンサシステム。
【請求項3】
請求項2に記載のセンサシステムにおいて、前記確認信号が前記近場測定値に対応し、該近場測定値は、少なくとも毎秒約3メートルの前記近場の接近速度を有し、前記物体が前記近場のスペース内に存在することを指し示すことを特徴とするセンサシステム。
【請求項4】
請求項1に記載のセンサシステムにおいて、前記確認センサが、前記近場のスペースの外周を規定する約3メートルまたはそれ以下の公称範囲を有することを特徴とするセンサシステム。
【請求項5】
請求項1に記載のセンサシステムにおいて、前記主レーダ装置が、およそ20GHzから80GHzの間の周波数で動作し前記レーダ測定値を導出するレーダセンサを含み、前記確認センサが、およそ900MHzから26GHzの間の周波数で動作し前記近場測定値を導出することを特徴とするセンサシステム。
【請求項6】
請求項1に記載のセンサシステムにおいて、前記確認センサが、少なくとも1つの近接アンテナに有効に接続する動作対象検出トランシーバと、前記少なくとも1つの近接アンテナを通じて検出信号を送受信する前記動作対象検出トランシーバを制御するように構成されて前記近場測定値を導出するマイクロプロセッサと、を含むことを特徴とするセンサシステム。
【請求項7】
請求項6に記載のセンサシステムにおいて、前記主レーダ装置がレーダセンサを含み、該レーダセンサは、前記確認センサと協同的に前記自動車に配置され、これによって前記近場のスペースを通過して自動車の外側を検出することを特徴とするセンサシステム。
【請求項8】
請求項6に記載のセンサシステムにおいて、前記レーダセンサが、少なくとも1つのレーダアンテナに有効に接続するレーダトランシーバと、少なくとも1つのレーダアンテナを通じてレーダ信号を送受信する前記レーダトランシーバを制御するように構成されて前記レーダ測定値を導出するレーダ信号マイクロプロセッサと、を含み、前記少なくとも1つのレーダアンテナおよび前記少なくとも1つの近接アンテナが同じ検出モジュールの一部であることを特徴とするセンサシステム。
【請求項9】
請求項8に記載のセンサシステムにおいて、前記検出モジュールが、前記自動車のドアに取り付けられることを特徴とするセンサシステム。
【請求項10】
請求項1に記載のセンサシステムにおいて、前記安全装置が、エアバッグ、カーテンエアバッグ、自動車のドア内の火工装置、シートベルトプリテンショナおよびブレーキアクチュエータのうちの1つであることを特徴とするセンサシステム。
【請求項11】
請求項1に記載のセンサシステムにおいて、前記レーダ測定値が、前記物体のレーダ断面積測定値をさらに含むことを特徴とするセンサシステム。
【請求項12】
請求項1に記載のセンサシステムにおいて、前記電子制御装置が、自動車パラメータに基づいて前記展開信号を発生し、該自動車パラメータは、自動車速度およびヨーレートの値のうちの少なくとも1つを含むことを特徴とするセンサシステム。
【請求項13】
請求項1に記載のセンサシステムにおいて、前記展開命令が前記レーダ測定値に対応し、該レーダ測定値は、少なくとも約1m2の前記レーダ断面積と、少なくとも毎秒約3メートルの前記レーダ接近速度と、前記レーダ距離測定値および該レーダ接近速度を用いて評価される約50ミリ秒よりも少ない衝突時間と、を有することを特徴とするセンサシステム。
【図1】

【図2】
【図3】
【図4】
【図5】
【図6】
【図7】

【図8】

【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【公表番号】特表2012−506052(P2012−506052A)
【公表日】平成24年3月8日(2012.3.8)
【国際特許分類】
【出願番号】特願2011−532104(P2011−532104)
【出願日】平成21年8月14日(2009.8.14)
【国際出願番号】PCT/US2009/053844
【国際公開番号】WO2010/044949
【国際公開日】平成22年4月22日(2010.4.22)
【出願人】(598122843)オートリブ エー・エス・ピー・インク (15)
【復代理人】
【識別番号】110000349
【氏名又は名称】特許業務法人 アクア特許事務所
【Fターム(参考)】
【公表日】平成24年3月8日(2012.3.8)
【国際特許分類】
【出願日】平成21年8月14日(2009.8.14)
【国際出願番号】PCT/US2009/053844
【国際公開番号】WO2010/044949
【国際公開日】平成22年4月22日(2010.4.22)
【出願人】(598122843)オートリブ エー・エス・ピー・インク (15)
【復代理人】
【識別番号】110000349
【氏名又は名称】特許業務法人 アクア特許事務所
【Fターム(参考)】
[ Back to top ]