
車載用ナビゲーション装置、及びプログラム
【課題】適切な経路案内を行う車載用ナビゲーション装置を提供する。
【解決手段】車載用ナビゲーション装置によれば、第1の経路から逸脱し(S101:YES)、第1の経路外の経路外道路に車両が乗線した場合(S102:YES)、第1の経路とは異なる第2の経路を探索する(S103)。このとき、第1の経路からの逸脱方向に逸脱地点近傍施設があり(S104:YES)、逸脱地点近傍施設の領域内で車両が停止した可能性があると判断された場合、第2の経路ではなく、第1の経路を案内する(S112)。これにより、例えば交差点付近の施設に立ち寄った場合、第1の経路を逸脱したと判断されても、再探索された第2の経路ではなく、再探索前の第1の経路が案内される。したがって、適切な経路を案内することができる。
【解決手段】車載用ナビゲーション装置によれば、第1の経路から逸脱し(S101:YES)、第1の経路外の経路外道路に車両が乗線した場合(S102:YES)、第1の経路とは異なる第2の経路を探索する(S103)。このとき、第1の経路からの逸脱方向に逸脱地点近傍施設があり(S104:YES)、逸脱地点近傍施設の領域内で車両が停止した可能性があると判断された場合、第2の経路ではなく、第1の経路を案内する(S112)。これにより、例えば交差点付近の施設に立ち寄った場合、第1の経路を逸脱したと判断されても、再探索された第2の経路ではなく、再探索前の第1の経路が案内される。したがって、適切な経路を案内することができる。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、車載用ナビゲーション装置、及びプログラムに関する。
【背景技術】
【0002】
従来、ユーザの所望する地点を目的地として設定し、経路を探索し、経路案内を行うことが可能な車載用ナビゲーション装置が公知である。また、このような車載用ナビゲーション装置では、車両が案内された経路から外れた場合には、再度経路を探索し、新たな経路を案内する機能を有するものがある。
【0003】
ところで、車載用ナビゲーション装置において、車両が案内されていた経路から外れたと判断されたとしても、例えば経路付近の施設に立ち寄っただけであるような場合、再度経路を探索することなく元のルートを案内することが好ましい。そこで、例えば特許文献1には、車両が案内経路から逸脱したことが検出されたとしても、逸脱後に走行している道路がサービスステーション等の付属施設への導入路である場合には、サービスステーション等の付属施設への立ち寄りと判断し、経路の再探索を行われないようにする技術が開示されている。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開平10−281796号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかしながら、全ての施設に対して導入路が存在するわけではないため、導入路のない施設については立ち寄りを正確に判断することが出来なかった。具体的には、例えば交差点付近の施設に立ち寄った場合、施設に隣接する道路が存在するため、施設の駐車場内にいるにも関わらず、車両が道路を走行していると誤認識されることがある。このとき、誤認識された道路が経路外の道路である場合には経路が再探索され、新たな経路が案内されてしまうが、このような問題点については、上述の特許文献1の技術によっても依然として解決されていない。
本発明は、上述した課題を解決するためになされたものであり、その目的は、適切な経路を案内する車載用ナビゲーション装置、及びプログラムを提供することにある。
【課題を解決するための手段】
【0006】
請求項1に記載の車載用ナビゲーション装置では、地図データ記憶手段に記憶された地図データに基づいて、設定された目的地までの経路である第1の経路を探索する経路探索手段と、第1の経路から逸脱し、第1の経路外の経路外道路に車両が乗線したとき、目的地に至る第1の経路とは異なる第2の経路を探索する再探索手段と、第1の経路外の経路外道路に乗線したとき、第1の経路に対する逸脱方向において、第1の経路から逸脱した逸脱地点の近傍に施設が存在するか否かを判断する施設判断手段と、施設判断手段により施設が存在すると判断されたとき、施設の領域内で車両が停止した可能性があるか否かを判断する停止判断手段と、停止判断手段により、施設の領域内で車両が停止した可能性があると判断された場合、第2の経路ではなく第1の経路を案内する案内手段と、を備えることを特徴とする。
【0007】
このような構成によれば、第1の経路から逸脱し、第2の経路が再探索されたとしても、逸脱方向において逸脱地点近傍に施設が存在し、かつ、施設の領域内で車両が停止した可能性があると判断された場合、第2の経路ではなく第1の経路を案内することができる。これにより、例えば交差点付近の施設に立ち寄った場合、経路を逸脱したと判断されても、再探索された第2の経路ではなく、再探索前の第1の経路が案内される。したがって、適切な経路を案内することができる。
【0008】
請求項2に記載の車載用ナビゲーション装置の停止判断手段は、逸脱地点から車両が停止した地点までの距離が、施設の領域に基づいて決定される所定距離以下である場合、施設の領域内で車両が停止した可能性があると判断する。このような構成によれば、施設の領域に基づいて所定距離が決定されるので、施設の領域内で車両が停止した可能性を、より適切に判断することができる。なお、「逸脱地点から車両が停止した地点までの距離」は、逸脱地点から車両が停止した地点までの直線距離としてもよい。また、「逸脱地点から車両が停止した地点までの距離」は、第1の経路から逸脱したときから、停止するまでに車両が走行した走行距離としてもよい。
【0009】
請求項3に記載の車載用ナビゲーション装置は、施設の駐車場の属性を特定する駐車場属性特定手段をさらに備える。停止判断手段は、駐車場の属性が駐車場内での車両の旋回走行を許容しない属性である場合、車両が第1の経路から逸脱したときから停止するまでの走行距離が、施設の領域に基づいて決定される第1の所定距離以下であるとき、施設の領域内で車両が停止した可能性があると判断する。また、停止判断手段は、駐車場の属性が駐車場内での車両の旋回走行を許容する属性である場合、車両が第1の経路から逸脱したときから停止するまでの走行距離が、施設の領域に基づいて決定される第2の所定距離以下であるとき、施設の領域内で車両が停止した可能性があると判断する。このように構成することにより、施設の駐車場の属性に基づいて、所定距離が決定されるので、施設の領域内で車両が停止した可能性を、より適切に判断することができる。
【0010】
以上は、車載用ナビゲーション装置の発明として説明してきたが、次に示すようなプログラムの発明として実現することもできる。
すなわち、地図データ記憶手段に記憶された地図データに基づいて、設定された目的地までの経路である第1の経路を探索する経路探索手段、第1の経路から逸脱し、第1の経路外の経路外道路に車両が乗線したとき、目的地に至る第1の経路とは異なる第2の経路を探索する再探索手段、第1の経路外の経路外道路に車両が乗線したとき、第1の経路に対する逸脱方向において、第1の経路から逸脱した逸脱地点の近傍に施設が存在するか否かを判断する施設判断手段、施設判断手段により施設が存在すると判断されたとき、施設の領域内で車両が停止した可能性があるか否かを判断する停止判断手段、停止判断手段により、施設の領域内で車両が停止した可能性があると判断された場合、第2の経路ではなく第1の経路を案内する案内手段、としてコンピュータを機能させるプログラムである。このようなプログラムを実行することで、上記と同様の効果が奏される。
【図面の簡単な説明】
【0011】
【図1】本発明の一実施形態の車載用ナビゲーション装置の構成を示すブロック図である。
【図2】本発明の一実施形態の車載用ナビゲーション装置による経路設定処理を示すフローチャートである。
【図3】本発明の一実施形態の車載用ナビゲーション装置による停止判断処理を示すフローチャートである。
【図4】本発明の一実施形態の車載用ナビゲーション装置による経路設定処理を説明する説明図である。
【図5】本発明の一実施形態の車載用ナビゲーション装置による経路設定処理を説明する説明図である。
【発明を実施するための形態】
【0012】
以下、本発明による車載用ナビゲーション装置を図面に基づいて説明する。
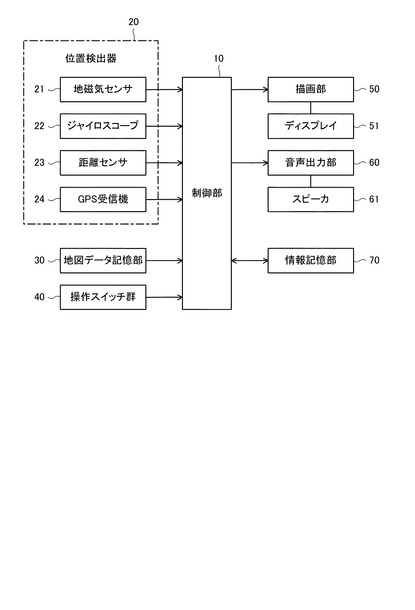
図1は、本実施形態による車載用ナビゲーション装置1の全体構成を示すブロック図である。車載用ナビゲーション装置1は、制御部10を中心に構成されており、制御部10に接続される位置検出器20、地図データ記憶部30、操作スイッチ群40、描画部50、音声出力部60、及び情報記憶部70等を備えている。
【0013】
制御部10は、通常のコンピュータとして構成されており、内部にはCPU、ROM、I/O、および、これらの構成を接続するバスラインなどが備えられている。
位置検出器20は、いずれも周知の地磁気センサ21、ジャイロスコープ22、距離センサ23、および、衛星からの電波を受信するGPS(Global Positioning System)受信機24等を有している。これらのセンサ等21〜24は、各々が性質の異なる誤差を持っているため、相互に補完しながら使用される。
【0014】
地図データ記憶部30は、例えばハードディスク装置(HDD)として実現される記憶装置である。なお、本実施形態ではHDDを用いたが、DVD−ROMや、メモリカード等の他の媒体を用いても差し支えない。地図データ記憶部30は、位置検出の精度向上のためのいわゆるマップマッチング用データおよび経路を探索するための地図データを記憶している。地図データには、各種データが含まれるが、その一つとして施設に関する施設情報が含まれる。施設情報は、具体的には、施設を特定するIDと関連づけて記憶されているPOI(Point Of Interest)情報である。POI情報には、施設ID、住所、種別(ジャンル)、領域を示すデータ(外周座標、中心座標、及び面積)などが含まれる。また、施設情報には、施設が駐車場である場合、或いは施設に含まれる駐車場がある場合、駐車場の属性に関する情報が記憶されている。本実施形態における駐車場の属性に関する情報は、駐車場内にて旋回走行を許容するか否かに関する旋回許容フラグである。例えば、施設に含まれる駐車場が広く、駐車場内を行き来できる駐車場には、旋回許容フラグがセットされている。また、駐車場が立体駐車場である場合、その階数が併せて記憶されている。一方、施設に含まれる駐車場が、施設に面した駐車枠が並列で、且つ1列のみである場合、駐車場内を行き来する蓋然性は低い。このような駐車場には旋回許容フラグがセットされていない。
【0015】
操作スイッチ群40は、ディスプレイ51と一体になったタッチスイッチもしくはメカニカルなスイッチやリモコン装置等で構成され、各種入力に使用される。
描画部50には、ディスプレイ51が接続されている。ディスプレイ51は、液晶やCRTを用いたカラーディスプレイである。このディスプレイ51を介して情報表示が行われる。
【0016】
音声出力部60にはスピーカ61が接続されており、このスピーカ61を介して音声による案内が行われる。
情報記憶部70は、探索された経路、経路から逸脱したときの逸脱地点や逸脱してからの走行軌跡等を記憶するためのものであり、地図データ記憶部30と同様のHDDで構成されている。もちろん、メモリカード等の他の媒体を用いてもよい。また、地図データ記憶部30と同一のHDDであってもよい。
【0017】
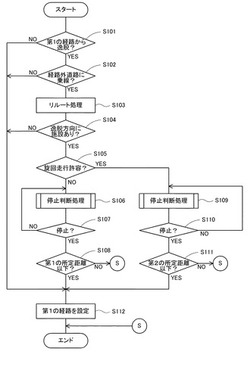
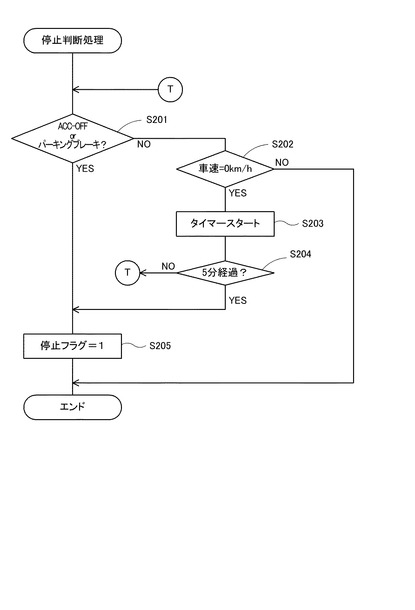
ところで、本実施形態においては、探索された経路から逸脱し、経路が再探索されたが、施設の領域内で車両が停止した可能性がある場合、再探索前の経路を案内する点に特徴を有している。そこで、図2及び図3に示すフローチャートに基づき、経路設定処理について説明する。この処理は、目的地及び目的地への経路が設定されている場合に所定の間隔、例えば100msecごと、に行われるものである。
目的地の設定は、例えば、操作スイッチ群40を介して、条件が入力されると、当該条件に合った目的地のリストがディスプレイ51に表示される。このリストの中から選択操作を行うことにより、目的地が設定される。なお、本実施形態における「目的地」は、所謂目的地だけでなく、経由地等も含むものとする。そして、設定された目的地への経路を探索し、探索された経路を情報記憶部70に記憶する。ここで探索された経路が「第1の経路」である。そして、第1の経路に案内フラグをセットする。なお、本実施形態においては、案内フラグがセットされている経路に基づいて、案内処理が行われるものとする。行う。
【0018】
最初のステップS101(以下、「ステップ」を省略し、単に記号「S」で示す。)では、第1の経路から逸脱したか否かを判断する。第1の経路から逸脱していない場合(S101:NO)、S102以降の処理を行わず、第1の経路による案内を継続する。第1の経路から逸脱した場合(S101:YES)、S102へ移行する。このとき、第1の経路から逸脱した地点を「逸脱地点」として情報記憶部70に記憶する。また、逸脱地点からの走行軌跡を情報記憶部70に記憶する。
S102では、第1の経路外の道路(以下、「経路外道路」という。)に乗線したか否かを判断する。経路外道路に乗線していない場合(S102:NO)、S103以降の処理を行わない。経路外道路に乗線した場合(S102:YES)、S103へ移行する。
S101及びS102の判断は、いずれもマッチング処理に基づくものである。マッチング処理は、読み込まれた自車位置の軌跡、及び自車位置周辺の道路を構成する各リンクの形状、配列等に基づいて、車両がいずれのリンク上に位置するかの判定を行うことによって、自車位置を特定するものである。S101では、マッチング処理により、第1の経路に含まれる道路にマッチングしているか否かを判断している。第1の経路に含まれる道路にマッチングしている状態からマッチングが外れた状態になったとき、「第1の経路から逸脱した」と判断される。また、経路外道路にマッチングしていない状態から経路外道路にマッチングした状態になったとき、「経路外道路に乗線した」と判断される。
【0019】
経路外道路に乗線した場合(S102:YES)に移行するS103では、乗線した経路外道路から、第1の経路とは異なる新たな経路を再探索するリルート処理を行う。ここで再探索された新たな経路が「第2の経路」である。そして、第2の経路を情報記憶部70に記憶する。また、第1の経路にセットされていた案内フラグをリセットし、第2の経路に案内フラグをセットし、第2の経路に基づく案内を行う。このとき、第1の経路に関する情報は消去せずに維持する。
【0020】
S104では、第1の経路に対する逸脱方向の逸脱地点近傍に施設(以下、「逸脱地点近傍施設」という。)があるか否かを判断する。このS104では、車両が逸脱した方向にユーザが立ち寄る可能性のあるなんらかの施設があるか否かを判断している。逸脱地点近傍施設がないと判断された場合(S104:NO)、S105以降の処理を行わず、S103にて再探索された第2の経路の案内フラグを維持する。逸脱地点近傍施設があると判断された場合(S104:YES)、S105へ移行する。なお、本実施形態における「逸脱地点の近傍」とは、逸脱地点に隣接していることを意味するが、逸脱地点から所定範囲内、例えば100m以内、としてもよい。
【0021】
S105では、逸脱地点近傍施設に関する施設情報を地図データ記憶部30から読み出す。そして、逸脱地点近傍施設に含まれる駐車場内にて旋回走行が許容されるか否かを判断する。駐車場内にて旋回走行が許容される場合(S105:YES)、すなわち旋回許容フラグがセットされている場合、S109へ移行する。駐車場内にて旋回走行が許容されない場合(S105:NO)、すなわち旋回許容フラグがセットされていない場合、S106へ移行する。
【0022】
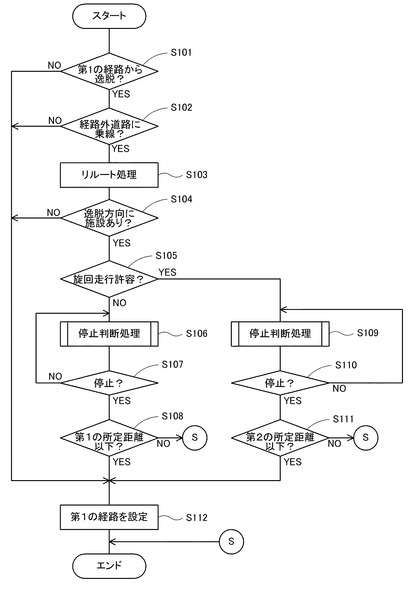
S106では、停止判断処理を行う。
ここで、停止判断処理を図3に示すフローチャートに基づいて説明する。
S201では、アクセサリ電源がオフされている、又はパーキングブレーキがかかっているか否かを判断する。アクセサリ電源がオフされている、又はパーキングブレーキがかかっている場合(S201:YES)、S205へ移行する。アクセサリ電源がオフされておらず、且つパーキングブレーキがかかっていない場合(S201:NO)、S202へ移行する。
【0023】
S202では、車速が0km/hであるか否かを判断する。車速が0km/hでない場合(S202:NO)、本処理を終了する。車速が0km/hである場合(S202:YES)、S203へ移行する。
S203では、タイマーによる計時をスタートする。なお、既にタイマーにおける計時がスタートしている場合には、計時を継続する。なお、本実施形態ではタイマーによって計時を行っているが、所定期間毎にインクリメントされるカウンタを用いて計時を行ってもよい。
【0024】
S204では、S203において計時開始されたタイマーが所定時間、本実施形態では5分、以上経過したか否かを判断する。5分以上経過していない場合(S204:NO)、S201に戻る。5分以上経過した場合(S204:YES)、S205へ移行する。
アクセサリ電源がオフされている、又はパーキングブレーキがかかっている場合(S201:YES)、または車速が0km/hが5分以上継続された場合(S202:YES、S203、S204:YES)に移行するS205では、停止フラグをセットし、本処理を終了する。
【0025】
再び図2に戻り、停止判断処理(S106)後に移行するS107では、停止フラグがセットされているか否かを判断する。停止フラグがセットされていない場合(S107:NO)、S106に戻る。停止フラグがセットされている場合(S107:YES)、S108へ移行する。
【0026】
S108では、逸脱地点から車両が停止した地点までの距離として、車両が第1の経路を逸脱したときから停止するまでの走行距離が第1の所定距離以下であるか否かを判断する。車両が第1の経路から逸脱したときから停止するまでの走行距離は、逸脱地点から停止位置までの走行軌跡に基づく距離であるが、第1の経路を逸脱したときの走行距離メータ値と停止したときの走行距離メータ値との差分値に基づく距離であってもよい。また、本実施形態における「第1の所定距離」は、逸脱地点近傍施設の領域の逸脱方向の長さである。車両が第1の経路から逸脱したときから停止するまでの走行距離が、第1の所定距離以下ではない場合(S108:NO)、S112の処理を行わず、S103にて再探索された第2の経路の案内フラグを維持する。車両が第1の経路から逸脱したときから停止するまでの走行距離が、第1の所定距離以下である場合(S108:YES)、S112へ移行する。尚、本ステップにおける逸脱地点から車両が停止した地点までの距離として、逸脱地点から停止位置までの直線距離としてもよい。この場合、乗線した経路外道路と第1の経路との交点(ノード)、すなわち交差点、を「逸脱地点」とし、この逸脱地点から車両が停止した地点までの直線距離としてもよい。
【0027】
また、駐車場内にて旋回走行が許容される場合(S105:YES)に移行するS109では、上述したS106と同様の停止判断処理を行う。
S110では、停止フラグがセットされているか否かを判断する。停止フラグがセットされていない場合(S110:NO)、S109に戻る。停止フラグがセットされている場合(S110:YES)、S111へ移行する。
【0028】
S111では、逸脱地点から車両が停止した地点までの距離として、車両が第1の経路から逸脱したときから停止するまでの走行距離が、第2の所定距離以下であるか否かを判断する。本実施形態における「第2の所定距離」は、逸脱地点近傍施設の外周の長さに設定されている。なお、第2の所定距離は、例えば、逸脱地点近傍施設の外周座標2点間の最大距離としてもよいし、逸脱地点近傍施設における駐車領域の外周距離としてもよい。また、第2の所定距離は、逸脱地点近傍施設に含まれる駐車場が立体駐車場である場合、駐車領域の外周に駐車階数を乗じた距離としてもよい。車両が第1の経路から逸脱したときから停止するまでの走行距離が第2の所定距離以下ではない場合(S111:NO)、S112の処理を行わず、S103にて再探索された第2の経路にセットされている案内フラグを継続する。車両が第1の経路から逸脱したときから停止するまでの走行距離が第2の所定距離以下である場合(S111:YES)、S112へ移行する。
【0029】
車両が第1の経路から逸脱したときから停止するまでの走行距離が第1の所定距離以下、或いは第2の所定距離以下である場合(S108:YES、又はS111:YES)に移行するS112では、第2の経路にセットされていた案内フラグをリセットし、第1の経路に案内フラグをセットし、本処理を終了する。そして、第2の経路ではなく、第1の経路による案内を行う。なお、アクセサリ電源がオフされている場合には、再度アクセサリ電源がオンされたときに、第1の経路による案内を行う。また、S112では、図3中のS205にてセットされた停止フラグをリセットする処理を併せて行う。
【0030】
ここで、図2及び図3に示すフローチャートにて説明した経路案内処理の具体例を図4及び図5に基づいて説明する。
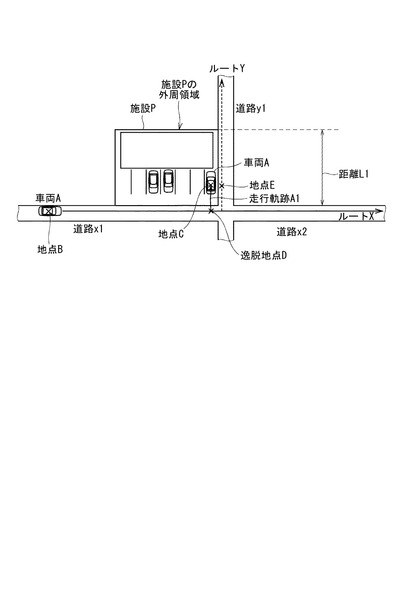
図4に示すように、車両Aに搭載された車載用ナビゲーション装置(以下、適宜「車両A」と言う。)では、目的地が設定され、当該目的地へのルートXが探索、案内されているものとする。このルートXには、案内フラグがセットされ、情報記憶部70に記憶されている。
車両Aが地点Bを走行しているとき、車両AはルートX上の道路である道路x1にマッチングしており、第1の経路から逸脱していない(図2中のS101:NO)。したがって、ルートXの案内を継続する。
【0031】
ここで、車両Aが施設Pに立ち寄るために地点Cに駐車したとき、経路X以外の道路y1上の地点Eにマッチングしているものとする。このとき、車両Aのアクセサリ電源はオフされているものとする。車両Aは、経路Xから逸脱しており(S101:YES)、経路X以外の経路外道路y1にマッチングしているので(S102:YES)、経路の再探索が行われ、新たなルートYが設定される(S103)。また、S101にて経路Xを逸脱した逸脱地点D、及び逸脱地点Dからの走行軌跡A1が情報記憶部70に記憶される。
【0032】
本実施形態では、図4に示す施設Pのような交差点付近の施設を利用した場合に、経路X以外の道路にマッチングしている場合においても、経路Xを案内すべく、以下の処理が行われる。
すなわち、道路y1方向における逸脱地点Dの近傍には、施設Pがある(S104:YES)。この施設Pの駐車場は、旋回走行を許容しない駐車場であるものとする(S105:NO)。また、車両Aのアクセサリ電源がオフされているので(図3中のS201:YES)、停止フラグがセットされている(S205、S107:YES)。このとき、逸脱地点Dから地点Cまでの走行軌跡A1に基づく走行距離は、道路y1方向における施設Pの領域距離L1、すなわち第1の所定距離よりも短い(S108:YES)。したがって、再探索された新たなルートYの案内フラグをリセットし、元のルートXに案内フラグをセットする(S112)。そして、アクセサリ電源が再度オンされたとき、ルートYではなく、ルートXの案内を行う。一方、車両Aが地点Eにて走行中である場合(S202:NO)、再探索前のルートXの案内に戻す処理(S112)は行われず、ルートYの案内が継続されることになる。なお、この例においては、ルートXが「第1の経路」に対応し、ルートYが「第2の経路」に対応し、距離L1が「第1の所定距離」に対応している。
【0033】
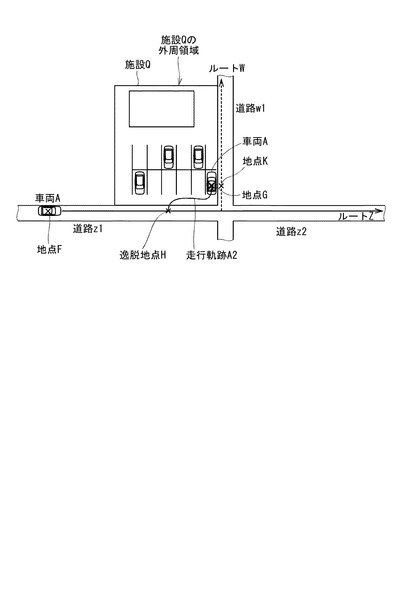
また別の例では、図5に示すように、車両Aに搭載された車載用ナビゲーション装置では、目的地が設定され、当該目的地へのルートZが探索、案内されているものとする。このルートZには、案内フラグがセットされ、情報記憶部70に記憶されている。
車両Aが地点Fを走行しているとき、車両AはルートZ上の道路である道路z1にマッチングしており、第1の経路から逸脱していない(図2中のS101:NO)。したがって、ルートZの案内を継続する。
【0034】
ここで、車両Aが施設Qに立ち寄るために地点Gに駐車したとき、経路Z以外の道路w1上の地点Kにマッチングしているものとする。このとき、車両Aのアクセサリ電源はオフされているものとする。車両Aは、経路Zから逸脱しており(S101:YES)、経路Z以外の経路外道路w1にマッチングしているので(S102:YES)、経路の再探索が行われ、新たなルートWが案内される(S103)。また、S101にて経路Zを逸脱した逸脱地点H、及び逸脱地点Hからの走行軌跡A2が情報記憶部70に記憶される。
【0035】
本実施形態では、図5に示す施設Qのような交差点付近の施設を利用した場合に、経路Z以外の道路にマッチングしている場合においても、経路Zを案内すべく、以下の処理が行われる。
すなわち、道路w1方向における逸脱地点Hの近傍には、施設Qがある(S104:YES)。この施設Qの駐車場は、旋回走行を許容する駐車場であるものとする(S105:YES)。また、地点Gにて車両Aのアクセサリ電源がオフされているので(図3中のS201:YES)、停止フラグがセットされている(S205、S113:YES)。このとき、逸脱地点Hから地点Gまでの走行軌跡A2に基づく走行距離は、施設Qの外周領域の距離、すなわち第2の所定距離より短い(S111:YES)。したがって、再探索された新たなルートWの案内フラグをリセットし、再探索前のルートZに案内フラグをセットする(S112)そして、アクセサリ電源が再度オンされたとき、ルートWではなく、ルートZの案内を行う。なお、この例においては、ルートZが「第1の経路」に対応し、ルートWが「第2の経路」に対応し、施設Qの外周領域長さが「第2の所定距離」に対応している。
【0036】
以上詳述したように、本実施形態による車載用ナビゲーション装置1によれば、第1の経路から逸脱し(S101:YES)、第1の経路外の経路外道路に車両が乗線した場合(S102:YES)、第1の経路とは異なる第2の経路を探索する(S103)。このとき、第1の経路に対する逸脱方向に逸脱地点近傍施設があり(S104:YES)、逸脱地点近傍施設の領域内で車両が停止した可能性があると判断された場合、第2の経路ではなく、第1の経路を案内する(S112)。このような構成によれば、例えば交差点付近の施設に立ち寄った場合、第1の経路を逸脱したと判断されても、再探索された第2の経路ではなく、再探索前の第1の経路が案内される。したがって、適切な経路を案内され、ユーザの混乱や遠回りを防ぐことができる。
【0037】
また、本実施形態では、逸脱地点から車両が停止した地点までの距離が、施設の領域に基づいて決定される所定距離以下である場合(S108:YES、又はS111:YES)、逸脱地点近傍施設の領域内で車両が停止した可能性があると判断され、第1の経路を案内する(S112)。このような構成によれば、施設の領域に基づいて所定距離が決定されるので、施設の領域内で車両が停止した可能性を、より適切に判断することができる。
【0038】
さらに、本実施形態では、逸脱地点近傍施設に付属する駐車場にて旋回走行が許容されるか否かを判断している(S105)。旋回走行が許容されない場合(S105:NO)、車両が第1の経路から逸脱したときから停止するまでの走行距離が第1の所定距離以下であるとき(S108:YES)、逸脱地点近傍施設の領域内で車両が停止した可能性があると判断され、第1の経路が案内される(S112)。また、旋回走行が許容される場合(S105:YES)、車両が第1の経路を逸脱したときから停止するまでの走行距離が第2の所定距離以下であるとき(S111:YES)、逸脱地点近傍施設の領域内で車両が停止した可能性があると判断され、第1の経路が案内される(S112)。このように構成することにより、逸脱地点近傍施設の駐車場の属性により、所定距離が決定されるので、施設の領域内で車両が停止した可能性を、より適切に判断することができる。
【0039】
なお、本実施形態の制御部10が、「経路探索手段」、「逸脱判断手段」、「再探索手段」、「施設判断手段」、「停止判断手段」、「案内手段」、及び「駐車場属性特定手段」を構成する。そして、図2中のS103が「再探索手段」の機能としての処理に相当し、S104が「施設判断手段」の機能としての処理に相当し、S106〜S111が「停止判断手段」の機能としての処理に相当し、S112が「案内手段」の機能としての処理に相当する。また、S105が「駐車場属性特定手段」の機能としての処理に相当する。
以上、本発明は、上記実施形態になんら限定されるものではなく、発明の趣旨を逸脱しない範囲において種々の形態で実施可能である。
【符号の説明】
【0040】
1:車載用ナビゲーション装置、10:制御部(経路探索手段、再探索手段、施設判断手段、停止判断手段、案内手段、駐車場属性特定手段)、20:位置検出器、21:地磁気センサ、22:ジャイロスコープ、23:距離センサ、24:GPS受信機、30:地図データ記憶部、40:操作スイッチ群、50:描画部、51:ディスプレイ、60:音声出力部、61:スピーカ、70:情報記憶部
【技術分野】
【0001】
本発明は、車載用ナビゲーション装置、及びプログラムに関する。
【背景技術】
【0002】
従来、ユーザの所望する地点を目的地として設定し、経路を探索し、経路案内を行うことが可能な車載用ナビゲーション装置が公知である。また、このような車載用ナビゲーション装置では、車両が案内された経路から外れた場合には、再度経路を探索し、新たな経路を案内する機能を有するものがある。
【0003】
ところで、車載用ナビゲーション装置において、車両が案内されていた経路から外れたと判断されたとしても、例えば経路付近の施設に立ち寄っただけであるような場合、再度経路を探索することなく元のルートを案内することが好ましい。そこで、例えば特許文献1には、車両が案内経路から逸脱したことが検出されたとしても、逸脱後に走行している道路がサービスステーション等の付属施設への導入路である場合には、サービスステーション等の付属施設への立ち寄りと判断し、経路の再探索を行われないようにする技術が開示されている。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開平10−281796号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかしながら、全ての施設に対して導入路が存在するわけではないため、導入路のない施設については立ち寄りを正確に判断することが出来なかった。具体的には、例えば交差点付近の施設に立ち寄った場合、施設に隣接する道路が存在するため、施設の駐車場内にいるにも関わらず、車両が道路を走行していると誤認識されることがある。このとき、誤認識された道路が経路外の道路である場合には経路が再探索され、新たな経路が案内されてしまうが、このような問題点については、上述の特許文献1の技術によっても依然として解決されていない。
本発明は、上述した課題を解決するためになされたものであり、その目的は、適切な経路を案内する車載用ナビゲーション装置、及びプログラムを提供することにある。
【課題を解決するための手段】
【0006】
請求項1に記載の車載用ナビゲーション装置では、地図データ記憶手段に記憶された地図データに基づいて、設定された目的地までの経路である第1の経路を探索する経路探索手段と、第1の経路から逸脱し、第1の経路外の経路外道路に車両が乗線したとき、目的地に至る第1の経路とは異なる第2の経路を探索する再探索手段と、第1の経路外の経路外道路に乗線したとき、第1の経路に対する逸脱方向において、第1の経路から逸脱した逸脱地点の近傍に施設が存在するか否かを判断する施設判断手段と、施設判断手段により施設が存在すると判断されたとき、施設の領域内で車両が停止した可能性があるか否かを判断する停止判断手段と、停止判断手段により、施設の領域内で車両が停止した可能性があると判断された場合、第2の経路ではなく第1の経路を案内する案内手段と、を備えることを特徴とする。
【0007】
このような構成によれば、第1の経路から逸脱し、第2の経路が再探索されたとしても、逸脱方向において逸脱地点近傍に施設が存在し、かつ、施設の領域内で車両が停止した可能性があると判断された場合、第2の経路ではなく第1の経路を案内することができる。これにより、例えば交差点付近の施設に立ち寄った場合、経路を逸脱したと判断されても、再探索された第2の経路ではなく、再探索前の第1の経路が案内される。したがって、適切な経路を案内することができる。
【0008】
請求項2に記載の車載用ナビゲーション装置の停止判断手段は、逸脱地点から車両が停止した地点までの距離が、施設の領域に基づいて決定される所定距離以下である場合、施設の領域内で車両が停止した可能性があると判断する。このような構成によれば、施設の領域に基づいて所定距離が決定されるので、施設の領域内で車両が停止した可能性を、より適切に判断することができる。なお、「逸脱地点から車両が停止した地点までの距離」は、逸脱地点から車両が停止した地点までの直線距離としてもよい。また、「逸脱地点から車両が停止した地点までの距離」は、第1の経路から逸脱したときから、停止するまでに車両が走行した走行距離としてもよい。
【0009】
請求項3に記載の車載用ナビゲーション装置は、施設の駐車場の属性を特定する駐車場属性特定手段をさらに備える。停止判断手段は、駐車場の属性が駐車場内での車両の旋回走行を許容しない属性である場合、車両が第1の経路から逸脱したときから停止するまでの走行距離が、施設の領域に基づいて決定される第1の所定距離以下であるとき、施設の領域内で車両が停止した可能性があると判断する。また、停止判断手段は、駐車場の属性が駐車場内での車両の旋回走行を許容する属性である場合、車両が第1の経路から逸脱したときから停止するまでの走行距離が、施設の領域に基づいて決定される第2の所定距離以下であるとき、施設の領域内で車両が停止した可能性があると判断する。このように構成することにより、施設の駐車場の属性に基づいて、所定距離が決定されるので、施設の領域内で車両が停止した可能性を、より適切に判断することができる。
【0010】
以上は、車載用ナビゲーション装置の発明として説明してきたが、次に示すようなプログラムの発明として実現することもできる。
すなわち、地図データ記憶手段に記憶された地図データに基づいて、設定された目的地までの経路である第1の経路を探索する経路探索手段、第1の経路から逸脱し、第1の経路外の経路外道路に車両が乗線したとき、目的地に至る第1の経路とは異なる第2の経路を探索する再探索手段、第1の経路外の経路外道路に車両が乗線したとき、第1の経路に対する逸脱方向において、第1の経路から逸脱した逸脱地点の近傍に施設が存在するか否かを判断する施設判断手段、施設判断手段により施設が存在すると判断されたとき、施設の領域内で車両が停止した可能性があるか否かを判断する停止判断手段、停止判断手段により、施設の領域内で車両が停止した可能性があると判断された場合、第2の経路ではなく第1の経路を案内する案内手段、としてコンピュータを機能させるプログラムである。このようなプログラムを実行することで、上記と同様の効果が奏される。
【図面の簡単な説明】
【0011】
【図1】本発明の一実施形態の車載用ナビゲーション装置の構成を示すブロック図である。
【図2】本発明の一実施形態の車載用ナビゲーション装置による経路設定処理を示すフローチャートである。
【図3】本発明の一実施形態の車載用ナビゲーション装置による停止判断処理を示すフローチャートである。
【図4】本発明の一実施形態の車載用ナビゲーション装置による経路設定処理を説明する説明図である。
【図5】本発明の一実施形態の車載用ナビゲーション装置による経路設定処理を説明する説明図である。
【発明を実施するための形態】
【0012】
以下、本発明による車載用ナビゲーション装置を図面に基づいて説明する。
図1は、本実施形態による車載用ナビゲーション装置1の全体構成を示すブロック図である。車載用ナビゲーション装置1は、制御部10を中心に構成されており、制御部10に接続される位置検出器20、地図データ記憶部30、操作スイッチ群40、描画部50、音声出力部60、及び情報記憶部70等を備えている。
【0013】
制御部10は、通常のコンピュータとして構成されており、内部にはCPU、ROM、I/O、および、これらの構成を接続するバスラインなどが備えられている。
位置検出器20は、いずれも周知の地磁気センサ21、ジャイロスコープ22、距離センサ23、および、衛星からの電波を受信するGPS(Global Positioning System)受信機24等を有している。これらのセンサ等21〜24は、各々が性質の異なる誤差を持っているため、相互に補完しながら使用される。
【0014】
地図データ記憶部30は、例えばハードディスク装置(HDD)として実現される記憶装置である。なお、本実施形態ではHDDを用いたが、DVD−ROMや、メモリカード等の他の媒体を用いても差し支えない。地図データ記憶部30は、位置検出の精度向上のためのいわゆるマップマッチング用データおよび経路を探索するための地図データを記憶している。地図データには、各種データが含まれるが、その一つとして施設に関する施設情報が含まれる。施設情報は、具体的には、施設を特定するIDと関連づけて記憶されているPOI(Point Of Interest)情報である。POI情報には、施設ID、住所、種別(ジャンル)、領域を示すデータ(外周座標、中心座標、及び面積)などが含まれる。また、施設情報には、施設が駐車場である場合、或いは施設に含まれる駐車場がある場合、駐車場の属性に関する情報が記憶されている。本実施形態における駐車場の属性に関する情報は、駐車場内にて旋回走行を許容するか否かに関する旋回許容フラグである。例えば、施設に含まれる駐車場が広く、駐車場内を行き来できる駐車場には、旋回許容フラグがセットされている。また、駐車場が立体駐車場である場合、その階数が併せて記憶されている。一方、施設に含まれる駐車場が、施設に面した駐車枠が並列で、且つ1列のみである場合、駐車場内を行き来する蓋然性は低い。このような駐車場には旋回許容フラグがセットされていない。
【0015】
操作スイッチ群40は、ディスプレイ51と一体になったタッチスイッチもしくはメカニカルなスイッチやリモコン装置等で構成され、各種入力に使用される。
描画部50には、ディスプレイ51が接続されている。ディスプレイ51は、液晶やCRTを用いたカラーディスプレイである。このディスプレイ51を介して情報表示が行われる。
【0016】
音声出力部60にはスピーカ61が接続されており、このスピーカ61を介して音声による案内が行われる。
情報記憶部70は、探索された経路、経路から逸脱したときの逸脱地点や逸脱してからの走行軌跡等を記憶するためのものであり、地図データ記憶部30と同様のHDDで構成されている。もちろん、メモリカード等の他の媒体を用いてもよい。また、地図データ記憶部30と同一のHDDであってもよい。
【0017】
ところで、本実施形態においては、探索された経路から逸脱し、経路が再探索されたが、施設の領域内で車両が停止した可能性がある場合、再探索前の経路を案内する点に特徴を有している。そこで、図2及び図3に示すフローチャートに基づき、経路設定処理について説明する。この処理は、目的地及び目的地への経路が設定されている場合に所定の間隔、例えば100msecごと、に行われるものである。
目的地の設定は、例えば、操作スイッチ群40を介して、条件が入力されると、当該条件に合った目的地のリストがディスプレイ51に表示される。このリストの中から選択操作を行うことにより、目的地が設定される。なお、本実施形態における「目的地」は、所謂目的地だけでなく、経由地等も含むものとする。そして、設定された目的地への経路を探索し、探索された経路を情報記憶部70に記憶する。ここで探索された経路が「第1の経路」である。そして、第1の経路に案内フラグをセットする。なお、本実施形態においては、案内フラグがセットされている経路に基づいて、案内処理が行われるものとする。行う。
【0018】
最初のステップS101(以下、「ステップ」を省略し、単に記号「S」で示す。)では、第1の経路から逸脱したか否かを判断する。第1の経路から逸脱していない場合(S101:NO)、S102以降の処理を行わず、第1の経路による案内を継続する。第1の経路から逸脱した場合(S101:YES)、S102へ移行する。このとき、第1の経路から逸脱した地点を「逸脱地点」として情報記憶部70に記憶する。また、逸脱地点からの走行軌跡を情報記憶部70に記憶する。
S102では、第1の経路外の道路(以下、「経路外道路」という。)に乗線したか否かを判断する。経路外道路に乗線していない場合(S102:NO)、S103以降の処理を行わない。経路外道路に乗線した場合(S102:YES)、S103へ移行する。
S101及びS102の判断は、いずれもマッチング処理に基づくものである。マッチング処理は、読み込まれた自車位置の軌跡、及び自車位置周辺の道路を構成する各リンクの形状、配列等に基づいて、車両がいずれのリンク上に位置するかの判定を行うことによって、自車位置を特定するものである。S101では、マッチング処理により、第1の経路に含まれる道路にマッチングしているか否かを判断している。第1の経路に含まれる道路にマッチングしている状態からマッチングが外れた状態になったとき、「第1の経路から逸脱した」と判断される。また、経路外道路にマッチングしていない状態から経路外道路にマッチングした状態になったとき、「経路外道路に乗線した」と判断される。
【0019】
経路外道路に乗線した場合(S102:YES)に移行するS103では、乗線した経路外道路から、第1の経路とは異なる新たな経路を再探索するリルート処理を行う。ここで再探索された新たな経路が「第2の経路」である。そして、第2の経路を情報記憶部70に記憶する。また、第1の経路にセットされていた案内フラグをリセットし、第2の経路に案内フラグをセットし、第2の経路に基づく案内を行う。このとき、第1の経路に関する情報は消去せずに維持する。
【0020】
S104では、第1の経路に対する逸脱方向の逸脱地点近傍に施設(以下、「逸脱地点近傍施設」という。)があるか否かを判断する。このS104では、車両が逸脱した方向にユーザが立ち寄る可能性のあるなんらかの施設があるか否かを判断している。逸脱地点近傍施設がないと判断された場合(S104:NO)、S105以降の処理を行わず、S103にて再探索された第2の経路の案内フラグを維持する。逸脱地点近傍施設があると判断された場合(S104:YES)、S105へ移行する。なお、本実施形態における「逸脱地点の近傍」とは、逸脱地点に隣接していることを意味するが、逸脱地点から所定範囲内、例えば100m以内、としてもよい。
【0021】
S105では、逸脱地点近傍施設に関する施設情報を地図データ記憶部30から読み出す。そして、逸脱地点近傍施設に含まれる駐車場内にて旋回走行が許容されるか否かを判断する。駐車場内にて旋回走行が許容される場合(S105:YES)、すなわち旋回許容フラグがセットされている場合、S109へ移行する。駐車場内にて旋回走行が許容されない場合(S105:NO)、すなわち旋回許容フラグがセットされていない場合、S106へ移行する。
【0022】
S106では、停止判断処理を行う。
ここで、停止判断処理を図3に示すフローチャートに基づいて説明する。
S201では、アクセサリ電源がオフされている、又はパーキングブレーキがかかっているか否かを判断する。アクセサリ電源がオフされている、又はパーキングブレーキがかかっている場合(S201:YES)、S205へ移行する。アクセサリ電源がオフされておらず、且つパーキングブレーキがかかっていない場合(S201:NO)、S202へ移行する。
【0023】
S202では、車速が0km/hであるか否かを判断する。車速が0km/hでない場合(S202:NO)、本処理を終了する。車速が0km/hである場合(S202:YES)、S203へ移行する。
S203では、タイマーによる計時をスタートする。なお、既にタイマーにおける計時がスタートしている場合には、計時を継続する。なお、本実施形態ではタイマーによって計時を行っているが、所定期間毎にインクリメントされるカウンタを用いて計時を行ってもよい。
【0024】
S204では、S203において計時開始されたタイマーが所定時間、本実施形態では5分、以上経過したか否かを判断する。5分以上経過していない場合(S204:NO)、S201に戻る。5分以上経過した場合(S204:YES)、S205へ移行する。
アクセサリ電源がオフされている、又はパーキングブレーキがかかっている場合(S201:YES)、または車速が0km/hが5分以上継続された場合(S202:YES、S203、S204:YES)に移行するS205では、停止フラグをセットし、本処理を終了する。
【0025】
再び図2に戻り、停止判断処理(S106)後に移行するS107では、停止フラグがセットされているか否かを判断する。停止フラグがセットされていない場合(S107:NO)、S106に戻る。停止フラグがセットされている場合(S107:YES)、S108へ移行する。
【0026】
S108では、逸脱地点から車両が停止した地点までの距離として、車両が第1の経路を逸脱したときから停止するまでの走行距離が第1の所定距離以下であるか否かを判断する。車両が第1の経路から逸脱したときから停止するまでの走行距離は、逸脱地点から停止位置までの走行軌跡に基づく距離であるが、第1の経路を逸脱したときの走行距離メータ値と停止したときの走行距離メータ値との差分値に基づく距離であってもよい。また、本実施形態における「第1の所定距離」は、逸脱地点近傍施設の領域の逸脱方向の長さである。車両が第1の経路から逸脱したときから停止するまでの走行距離が、第1の所定距離以下ではない場合(S108:NO)、S112の処理を行わず、S103にて再探索された第2の経路の案内フラグを維持する。車両が第1の経路から逸脱したときから停止するまでの走行距離が、第1の所定距離以下である場合(S108:YES)、S112へ移行する。尚、本ステップにおける逸脱地点から車両が停止した地点までの距離として、逸脱地点から停止位置までの直線距離としてもよい。この場合、乗線した経路外道路と第1の経路との交点(ノード)、すなわち交差点、を「逸脱地点」とし、この逸脱地点から車両が停止した地点までの直線距離としてもよい。
【0027】
また、駐車場内にて旋回走行が許容される場合(S105:YES)に移行するS109では、上述したS106と同様の停止判断処理を行う。
S110では、停止フラグがセットされているか否かを判断する。停止フラグがセットされていない場合(S110:NO)、S109に戻る。停止フラグがセットされている場合(S110:YES)、S111へ移行する。
【0028】
S111では、逸脱地点から車両が停止した地点までの距離として、車両が第1の経路から逸脱したときから停止するまでの走行距離が、第2の所定距離以下であるか否かを判断する。本実施形態における「第2の所定距離」は、逸脱地点近傍施設の外周の長さに設定されている。なお、第2の所定距離は、例えば、逸脱地点近傍施設の外周座標2点間の最大距離としてもよいし、逸脱地点近傍施設における駐車領域の外周距離としてもよい。また、第2の所定距離は、逸脱地点近傍施設に含まれる駐車場が立体駐車場である場合、駐車領域の外周に駐車階数を乗じた距離としてもよい。車両が第1の経路から逸脱したときから停止するまでの走行距離が第2の所定距離以下ではない場合(S111:NO)、S112の処理を行わず、S103にて再探索された第2の経路にセットされている案内フラグを継続する。車両が第1の経路から逸脱したときから停止するまでの走行距離が第2の所定距離以下である場合(S111:YES)、S112へ移行する。
【0029】
車両が第1の経路から逸脱したときから停止するまでの走行距離が第1の所定距離以下、或いは第2の所定距離以下である場合(S108:YES、又はS111:YES)に移行するS112では、第2の経路にセットされていた案内フラグをリセットし、第1の経路に案内フラグをセットし、本処理を終了する。そして、第2の経路ではなく、第1の経路による案内を行う。なお、アクセサリ電源がオフされている場合には、再度アクセサリ電源がオンされたときに、第1の経路による案内を行う。また、S112では、図3中のS205にてセットされた停止フラグをリセットする処理を併せて行う。
【0030】
ここで、図2及び図3に示すフローチャートにて説明した経路案内処理の具体例を図4及び図5に基づいて説明する。
図4に示すように、車両Aに搭載された車載用ナビゲーション装置(以下、適宜「車両A」と言う。)では、目的地が設定され、当該目的地へのルートXが探索、案内されているものとする。このルートXには、案内フラグがセットされ、情報記憶部70に記憶されている。
車両Aが地点Bを走行しているとき、車両AはルートX上の道路である道路x1にマッチングしており、第1の経路から逸脱していない(図2中のS101:NO)。したがって、ルートXの案内を継続する。
【0031】
ここで、車両Aが施設Pに立ち寄るために地点Cに駐車したとき、経路X以外の道路y1上の地点Eにマッチングしているものとする。このとき、車両Aのアクセサリ電源はオフされているものとする。車両Aは、経路Xから逸脱しており(S101:YES)、経路X以外の経路外道路y1にマッチングしているので(S102:YES)、経路の再探索が行われ、新たなルートYが設定される(S103)。また、S101にて経路Xを逸脱した逸脱地点D、及び逸脱地点Dからの走行軌跡A1が情報記憶部70に記憶される。
【0032】
本実施形態では、図4に示す施設Pのような交差点付近の施設を利用した場合に、経路X以外の道路にマッチングしている場合においても、経路Xを案内すべく、以下の処理が行われる。
すなわち、道路y1方向における逸脱地点Dの近傍には、施設Pがある(S104:YES)。この施設Pの駐車場は、旋回走行を許容しない駐車場であるものとする(S105:NO)。また、車両Aのアクセサリ電源がオフされているので(図3中のS201:YES)、停止フラグがセットされている(S205、S107:YES)。このとき、逸脱地点Dから地点Cまでの走行軌跡A1に基づく走行距離は、道路y1方向における施設Pの領域距離L1、すなわち第1の所定距離よりも短い(S108:YES)。したがって、再探索された新たなルートYの案内フラグをリセットし、元のルートXに案内フラグをセットする(S112)。そして、アクセサリ電源が再度オンされたとき、ルートYではなく、ルートXの案内を行う。一方、車両Aが地点Eにて走行中である場合(S202:NO)、再探索前のルートXの案内に戻す処理(S112)は行われず、ルートYの案内が継続されることになる。なお、この例においては、ルートXが「第1の経路」に対応し、ルートYが「第2の経路」に対応し、距離L1が「第1の所定距離」に対応している。
【0033】
また別の例では、図5に示すように、車両Aに搭載された車載用ナビゲーション装置では、目的地が設定され、当該目的地へのルートZが探索、案内されているものとする。このルートZには、案内フラグがセットされ、情報記憶部70に記憶されている。
車両Aが地点Fを走行しているとき、車両AはルートZ上の道路である道路z1にマッチングしており、第1の経路から逸脱していない(図2中のS101:NO)。したがって、ルートZの案内を継続する。
【0034】
ここで、車両Aが施設Qに立ち寄るために地点Gに駐車したとき、経路Z以外の道路w1上の地点Kにマッチングしているものとする。このとき、車両Aのアクセサリ電源はオフされているものとする。車両Aは、経路Zから逸脱しており(S101:YES)、経路Z以外の経路外道路w1にマッチングしているので(S102:YES)、経路の再探索が行われ、新たなルートWが案内される(S103)。また、S101にて経路Zを逸脱した逸脱地点H、及び逸脱地点Hからの走行軌跡A2が情報記憶部70に記憶される。
【0035】
本実施形態では、図5に示す施設Qのような交差点付近の施設を利用した場合に、経路Z以外の道路にマッチングしている場合においても、経路Zを案内すべく、以下の処理が行われる。
すなわち、道路w1方向における逸脱地点Hの近傍には、施設Qがある(S104:YES)。この施設Qの駐車場は、旋回走行を許容する駐車場であるものとする(S105:YES)。また、地点Gにて車両Aのアクセサリ電源がオフされているので(図3中のS201:YES)、停止フラグがセットされている(S205、S113:YES)。このとき、逸脱地点Hから地点Gまでの走行軌跡A2に基づく走行距離は、施設Qの外周領域の距離、すなわち第2の所定距離より短い(S111:YES)。したがって、再探索された新たなルートWの案内フラグをリセットし、再探索前のルートZに案内フラグをセットする(S112)そして、アクセサリ電源が再度オンされたとき、ルートWではなく、ルートZの案内を行う。なお、この例においては、ルートZが「第1の経路」に対応し、ルートWが「第2の経路」に対応し、施設Qの外周領域長さが「第2の所定距離」に対応している。
【0036】
以上詳述したように、本実施形態による車載用ナビゲーション装置1によれば、第1の経路から逸脱し(S101:YES)、第1の経路外の経路外道路に車両が乗線した場合(S102:YES)、第1の経路とは異なる第2の経路を探索する(S103)。このとき、第1の経路に対する逸脱方向に逸脱地点近傍施設があり(S104:YES)、逸脱地点近傍施設の領域内で車両が停止した可能性があると判断された場合、第2の経路ではなく、第1の経路を案内する(S112)。このような構成によれば、例えば交差点付近の施設に立ち寄った場合、第1の経路を逸脱したと判断されても、再探索された第2の経路ではなく、再探索前の第1の経路が案内される。したがって、適切な経路を案内され、ユーザの混乱や遠回りを防ぐことができる。
【0037】
また、本実施形態では、逸脱地点から車両が停止した地点までの距離が、施設の領域に基づいて決定される所定距離以下である場合(S108:YES、又はS111:YES)、逸脱地点近傍施設の領域内で車両が停止した可能性があると判断され、第1の経路を案内する(S112)。このような構成によれば、施設の領域に基づいて所定距離が決定されるので、施設の領域内で車両が停止した可能性を、より適切に判断することができる。
【0038】
さらに、本実施形態では、逸脱地点近傍施設に付属する駐車場にて旋回走行が許容されるか否かを判断している(S105)。旋回走行が許容されない場合(S105:NO)、車両が第1の経路から逸脱したときから停止するまでの走行距離が第1の所定距離以下であるとき(S108:YES)、逸脱地点近傍施設の領域内で車両が停止した可能性があると判断され、第1の経路が案内される(S112)。また、旋回走行が許容される場合(S105:YES)、車両が第1の経路を逸脱したときから停止するまでの走行距離が第2の所定距離以下であるとき(S111:YES)、逸脱地点近傍施設の領域内で車両が停止した可能性があると判断され、第1の経路が案内される(S112)。このように構成することにより、逸脱地点近傍施設の駐車場の属性により、所定距離が決定されるので、施設の領域内で車両が停止した可能性を、より適切に判断することができる。
【0039】
なお、本実施形態の制御部10が、「経路探索手段」、「逸脱判断手段」、「再探索手段」、「施設判断手段」、「停止判断手段」、「案内手段」、及び「駐車場属性特定手段」を構成する。そして、図2中のS103が「再探索手段」の機能としての処理に相当し、S104が「施設判断手段」の機能としての処理に相当し、S106〜S111が「停止判断手段」の機能としての処理に相当し、S112が「案内手段」の機能としての処理に相当する。また、S105が「駐車場属性特定手段」の機能としての処理に相当する。
以上、本発明は、上記実施形態になんら限定されるものではなく、発明の趣旨を逸脱しない範囲において種々の形態で実施可能である。
【符号の説明】
【0040】
1:車載用ナビゲーション装置、10:制御部(経路探索手段、再探索手段、施設判断手段、停止判断手段、案内手段、駐車場属性特定手段)、20:位置検出器、21:地磁気センサ、22:ジャイロスコープ、23:距離センサ、24:GPS受信機、30:地図データ記憶部、40:操作スイッチ群、50:描画部、51:ディスプレイ、60:音声出力部、61:スピーカ、70:情報記憶部
【特許請求の範囲】
【請求項1】
地図データ記憶手段に記憶された地図データに基づいて、設定された目的地までの経路である第1の経路を探索する経路探索手段と、
前記第1の経路から逸脱し、前記第1の経路外の経路外道路に車両が乗線したとき、前記目的地に至る前記第1の経路とは異なる第2の経路を探索する再探索手段と、
前記第1の経路外の前記経路外道路に前記車両が乗線したとき、前記第1の経路に対する逸脱方向において、前記第1の経路から逸脱した逸脱地点の近傍に施設が存在するか否かを判断する施設判断手段と、
前記施設判断手段により前記施設が存在すると判断されたとき、前記施設の領域内で前記車両が停止した可能性があるか否かを判断する停止判断手段と、
前記停止判断手段により、前記施設の領域内で前記車両が停止した可能性があると判断された場合、前記第2の経路ではなく前記第1の経路を案内する案内手段と、
を備えることを特徴とする車載用ナビゲーション装置。
【請求項2】
前記停止判断手段は、前記逸脱地点から前記車両が停止した地点までの距離が、前記施設の領域に基づいて決定される所定距離以下である場合、前記施設の領域内で前記車両が停止した可能性があると判断することを特徴とする請求項1に記載の車載用ナビゲーション装置。
【請求項3】
前記施設の駐車場の属性を特定する駐車場属性特定手段をさらに備え、
前記停止判断手段は、
前記駐車場の属性が前記駐車場内での前記車両の旋回走行を許容しない属性である場合、前記車両が前記第1の経路から逸脱したときから停止するまでの走行距離が、前記施設の領域に基づいて決定される第1の所定距離以下であるとき、前記施設の領域内で前記車両が停止した可能性があると判断し、
前記駐車場の属性が前記駐車場内での前記車両の旋回走行を許容する属性である場合、前記車両が前記第1の経路から逸脱したときから停止するまでの走行距離が、前記施設の領域に基づいて決定される第2の所定距離以下であるとき、前記施設の領域内で前記車両が停止した可能性があると判断することを特徴とする請求項2に記載の車載用ナビゲーション装置。
【請求項4】
地図データ記憶手段に記憶された地図データに基づいて、設定された目的地までの経路である第1の経路を探索する経路探索手段、
前記第1の経路から逸脱し、前記第1の経路外の経路外道路に車両が乗線したとき、前記目的地に至る前記第1の経路とは異なる第2の経路を探索する再探索手段、
前記第1の経路外の前記経路外道路に前記車両が乗線したとき、前記第1の経路に対する逸脱方向において、前記第1の経路から逸脱した逸脱地点の近傍に施設が存在するか否かを判断する施設判断手段、
前記施設判断手段により前記施設が存在すると判断されたとき、前記施設の領域内で前記車両が停止した可能性があるか否かを判断する停止判断手段、
及び、前記停止判断手段により、前記施設の領域内で前記車両が停止した可能性があると判断された場合、前記第2の経路ではなく前記第1の経路を案内する案内手段、
としてコンピュータを機能させるプログラム。
【請求項1】
地図データ記憶手段に記憶された地図データに基づいて、設定された目的地までの経路である第1の経路を探索する経路探索手段と、
前記第1の経路から逸脱し、前記第1の経路外の経路外道路に車両が乗線したとき、前記目的地に至る前記第1の経路とは異なる第2の経路を探索する再探索手段と、
前記第1の経路外の前記経路外道路に前記車両が乗線したとき、前記第1の経路に対する逸脱方向において、前記第1の経路から逸脱した逸脱地点の近傍に施設が存在するか否かを判断する施設判断手段と、
前記施設判断手段により前記施設が存在すると判断されたとき、前記施設の領域内で前記車両が停止した可能性があるか否かを判断する停止判断手段と、
前記停止判断手段により、前記施設の領域内で前記車両が停止した可能性があると判断された場合、前記第2の経路ではなく前記第1の経路を案内する案内手段と、
を備えることを特徴とする車載用ナビゲーション装置。
【請求項2】
前記停止判断手段は、前記逸脱地点から前記車両が停止した地点までの距離が、前記施設の領域に基づいて決定される所定距離以下である場合、前記施設の領域内で前記車両が停止した可能性があると判断することを特徴とする請求項1に記載の車載用ナビゲーション装置。
【請求項3】
前記施設の駐車場の属性を特定する駐車場属性特定手段をさらに備え、
前記停止判断手段は、
前記駐車場の属性が前記駐車場内での前記車両の旋回走行を許容しない属性である場合、前記車両が前記第1の経路から逸脱したときから停止するまでの走行距離が、前記施設の領域に基づいて決定される第1の所定距離以下であるとき、前記施設の領域内で前記車両が停止した可能性があると判断し、
前記駐車場の属性が前記駐車場内での前記車両の旋回走行を許容する属性である場合、前記車両が前記第1の経路から逸脱したときから停止するまでの走行距離が、前記施設の領域に基づいて決定される第2の所定距離以下であるとき、前記施設の領域内で前記車両が停止した可能性があると判断することを特徴とする請求項2に記載の車載用ナビゲーション装置。
【請求項4】
地図データ記憶手段に記憶された地図データに基づいて、設定された目的地までの経路である第1の経路を探索する経路探索手段、
前記第1の経路から逸脱し、前記第1の経路外の経路外道路に車両が乗線したとき、前記目的地に至る前記第1の経路とは異なる第2の経路を探索する再探索手段、
前記第1の経路外の前記経路外道路に前記車両が乗線したとき、前記第1の経路に対する逸脱方向において、前記第1の経路から逸脱した逸脱地点の近傍に施設が存在するか否かを判断する施設判断手段、
前記施設判断手段により前記施設が存在すると判断されたとき、前記施設の領域内で前記車両が停止した可能性があるか否かを判断する停止判断手段、
及び、前記停止判断手段により、前記施設の領域内で前記車両が停止した可能性があると判断された場合、前記第2の経路ではなく前記第1の経路を案内する案内手段、
としてコンピュータを機能させるプログラム。
【図1】


【図2】
【図3】
【図4】
【図5】
【図2】
【図3】
【図4】
【図5】
【公開番号】特開2010−203893(P2010−203893A)
【公開日】平成22年9月16日(2010.9.16)
【国際特許分類】
【出願番号】特願2009−49194(P2009−49194)
【出願日】平成21年3月3日(2009.3.3)
【出願人】(000100768)アイシン・エィ・ダブリュ株式会社 (3,717)
【Fターム(参考)】
【公開日】平成22年9月16日(2010.9.16)
【国際特許分類】
【出願日】平成21年3月3日(2009.3.3)
【出願人】(000100768)アイシン・エィ・ダブリュ株式会社 (3,717)
【Fターム(参考)】
[ Back to top ]