
X線画像診断装置
【課題】視野の狭い小型高精細検出器を使用しても検査の迅速化が可能なX線画像診断装置を提供すること。
【解決手段】第1の視野サイズを有するX線検出器111および高解像度で小視野な第2の視野サイズを有する高精細検出器112で構成されるX線検出部11と、X線発生部10と、撮像系が回転可能に設けられたCアーム保持装置12と、Cアーム駆動部151と、被写体のX線画像を生成する画像演算処理部162と、第1の視野サイズのX線画像上で第2の視野サイズに相当するマーカをROI設定画面に表示し、このマーカをROIに移動してROIを設定するROI設定部163と、第1の視野サイズのX線画像の中心位置とマーカの中心位置の座標差を求める位置ずれ計算部164と、Cアーム駆動部を制御し、座標差に基づいてROIの中心位置を第1の視野サイズのX線画像の中心に移動するセンタリング制御部165と、を有する。
【解決手段】第1の視野サイズを有するX線検出器111および高解像度で小視野な第2の視野サイズを有する高精細検出器112で構成されるX線検出部11と、X線発生部10と、撮像系が回転可能に設けられたCアーム保持装置12と、Cアーム駆動部151と、被写体のX線画像を生成する画像演算処理部162と、第1の視野サイズのX線画像上で第2の視野サイズに相当するマーカをROI設定画面に表示し、このマーカをROIに移動してROIを設定するROI設定部163と、第1の視野サイズのX線画像の中心位置とマーカの中心位置の座標差を求める位置ずれ計算部164と、Cアーム駆動部を制御し、座標差に基づいてROIの中心位置を第1の視野サイズのX線画像の中心に移動するセンタリング制御部165と、を有する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明の実施形態は、X線画像診断装置に関する。
【背景技術】
【0002】
従来、Cアーム形保持装置を有するX線画像診断装置では、Cアームの両端に一対のX線発生部とX線検出部を対向する形で搭載させ、X線検出器(I.I.:Image IntensifierあるいはFPD:Flat Panel Detector)の大きさや視野サイズ切り換えの設定値に応じて、透視画像および撮影画像を表示モニタに表示させることができる。
【0003】
近年、このCアーム形保持装置のX線検出部に、8〜12インチ程度の画面サイズを持つX線検出器に加えて小形高精細検出器も搭載し、病変部などの小さな関心領域(ROI:Region of Interest)のより鮮明な画像を得ることで診断・治療手技のレベルを上げる取組みが実施されている。(例えば2つのX線検出器を持つものとして特許文献1がある。)
このような2つのX線検出器を有する装置では、必要に応じて通常視野サイズのX線検出器の前面に小視野サイズの小形高精細検出器を配置して高精細画像を収集し、不必要な場合にはこれを退避する切換えアーム機構をX線検出部に設ける構造のものがある。
【0004】
この小視野サイズの小形高精細検出器を搭載するX線画像診断装置において、通常サイズのX線検出器から小型高精細検出器に切り換えると視野サイズが小さくなる。従って予めROIに画像中心を合わせてから小視野サイズに切り換えるか、切り換えた後にROIが小視野サイズ内に入るようにCアームを動かしたり、寝台を動かしたりして調整する必要があるが、これでは使い勝手が悪く手技効率の面で問題がある。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】米国特許第6285739号明細書
【発明の概要】
【発明が解決しようとする課題】
【0006】
本発明が解決しようとする課題は、上記問題を解決し、視野の狭い小型高精細検出器を使用しても検査の迅速化が可能なX線画像診断装置を提供することである。
【課題を解決するための手段】
【0007】
上記課題を達成するために、実施形態のX線画像診断装置は、第1の視野サイズを有するX線検出器および前記X線検出器より高解像度でかつ小視野な第2の視野サイズを有する高精細検出器で構成されるX線検出部と、被写体に照射するX線を発生するX線発生部と、このX線発生部に対向して配置されるX線検出部で構成される撮像系が回転可能に設けられたCアーム保持装置と、前記前記Cアーム保持装置の位置を制御するCアーム駆動部と、前記X線検出器と前記高精細検出器で被写体のX線画像を生成する画像演算処理部と、前記第1の視野サイズのX線画像上で前記第2の視野サイズに相当するマーカをROI設定画面に表示し、このマーカをROIに移動して前記ROIを設定するROI設定部と、前記第1の視野サイズのX線画像の中心位置と前記マーカの中心位置の座標差を求める位置ずれ計算部と、前記Cアーム駆動部を制御し、前記座標差に基づいて前記ROIの中心位置を前記第1の視野サイズのX線画像の中心に移動するセンタリング制御部と、を有する。
【図面の簡単な説明】
【0008】
【図1】第1の実施形態に係るX線画像診断装置のブロック構成図。
【図2】同実施形態に係るX線画像診断装置の天井走行式Cアーム保持装置の構成図。
【図3】同実施形態におけるコンソールの一例を示す図。
【図4】同実施形態における高精細検出器使用時のフローチャート図。
【図5】同実施形態におけるROI設定の説明図。
【図6】同実施形態におけるROI設定後の高精細検出器の透視画像例。
【図7】第2の実施形態におけるX線画像診断装置の床置き式5軸Cアーム保持装置の構成図。
【図8】第3の実施形態に係るX線画像診断装置のブロック構成図。
【図9】同実施形態における高精細検出器への自動切換制御のフローチャート図。
【図10】同実施形態におけるX線検出器への自動切換制御のフローチャート図。
【発明を実施するための形態】
【0009】
以下、発明を実施するための実施形態について図1から図10に示す図面を参照しながら詳細に説明する。
【0010】
(第1の実施形態)
以下に述べる実施形態では、X線発生部及びX線検出部を端部に備えたCアームを回転自在に取り付けたX線画像診断装置について説明する。まずX線画像診断装置の構成につき図1乃至図3を用いて説明する。図1は、X線画像診断装置の全体構成を示すブロック図である。図2は、天井走行式Cアーム保持装置を有するX線画像診断装置の構成図である。図3はコンソール部の構成を示す。
【0011】
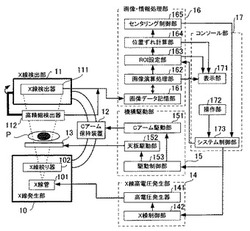
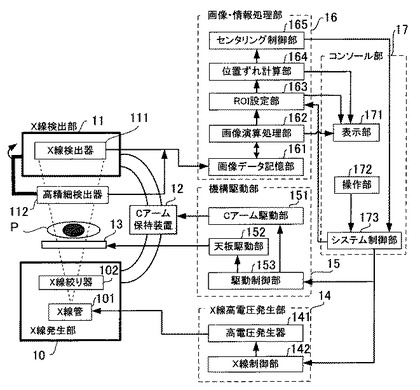
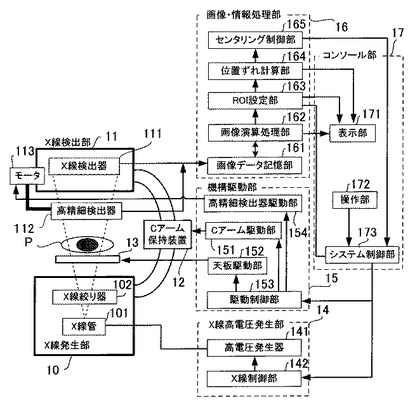
本実施形態におけるX線画像診断装置は、Cアームを有し、X線を被写体Pに対して照射するX線発生部10と、被写体Pを透過したX線を2次元的に検出するX線検出部11と、X線発生部10とX線検出部11を保持するCアーム保持装置12と、被写体Pを載置する寝台13と、X線発生部10におけるX線照射に必要な高電圧を発生する高電圧発生部14を備えている。
【0012】
また、Cアーム保持装置12で保持されるCアームの位置制御および回転制御や、寝台13の移動制御に対して制御を行う機構駆動部15と、X線検出部11において検出された被写体Pの投影データに基づいてX線画像データの生成や保存、および各種演算を行なう画像・情報処理部16と、このX線画像診断装置の操作、制御、表示を行うコンソール部17を備えている。
【0013】
X線発生部10は、被写体Pに対しX線を照射するX線管101と、X線管101から照射されたX線に対してX線錘(コーンビーム)を形成するX線絞り器102を備えている。X線管101は、X線を発生する真空管であり、陰極(フィラメント)より放出された熱電子を高電圧によって加速させ、この加速電子をタングステン陽極に衝突させることでX線を発生させる。一方、X線絞り器102は、X線管101と被写体Pの間に位置し、X線管101から照射されたX線ビームを所定の照射サイズに絞り込む機能を有しており、X線検出部11に複数のX線検出器を含む本実施形態においては、X線検出器の切り替えの際にそれぞれのX線検出器の視野サイズに対応した照射サイズの絞り込みを自動的に行うことができる。
【0014】
X線検出部11は、被写体Pを透過したX線を電荷に変換して蓄積する平面状のX線検出器111(FPD)と、高精細検出器112を有する。この高精細検出器112は、FPDで観測した部位の一部に対してさらに高精細な画像を取得する。高精細検出器112はX線検出部11前面に配置できるようにアーム等で支持され、不必要な場合にはこれを退避可能とする切換え機構が形成される。尚、図示しないが、X線検出部11はX線検出器111および高精細検出器112に蓄積された電荷を読み出し、読み出された電荷からX線投影データを生成する投影データ生成部などを備えている。
【0015】
X線検出器111は、例えばFPDで構成する。FPDのパネルの大きさは特殊なものを除いて通常8〜12インチである。微小な検出素子を列方向及びライン方向に2次元的に配列して構成されており、各々の検出素子はX線を感知し、入射X線量に応じて電荷を生成する光電膜と、この光電膜に発生した電荷を蓄積する電荷蓄積コンデンサと、電荷蓄積コンデンサに蓄積された電荷を所定のタイミングで読み出すTFT薄膜トランジスタから構成されている。
【0016】
高精細検出器112は、FPDに比べて高精細(高解像度)であるが、視野が狭い検出器である。その視野は直径20〜30mm程度の円形状である。この高精細検出器112は、単結晶Si基板上に形成されたCCD(Charge Coupled Device)上にシンチレータを形成し、その視野サイズは単結晶Si基板の大きさで決定されるため大面積のものを製作するのが困難である。
【0017】
高電圧発生部14は、X線管101の陰極から発生する熱電子を加速するために、陽極と陰極の間に印加する高電圧を発生させる高電圧発生器141と、システム制御部19の指示信号に従い、高電圧発生器141における管電流、管電圧、照射時間等のX線照射条件の制御を行なうX線制御部142を備えている。
【0018】
機構駆動部15は、Cアーム保持装置12に設けられたスライド機構、回転機構及び移動機構に対し駆動信号を供給するCアーム駆動部151と、寝台13の天板を長手方向あるいは横手方向への移動を行なうための駆動信号を供給する天板駆動部152と、これらCアーム駆動部151及び天板駆動部152を制御する駆動制御部153を備えている。
【0019】
画像・情報処理部16は、X線検出器111の投影データなどの画像データを一時的または永久的に記憶する画像データ記憶部161と、画像データ記憶部161から所望の画像データを取得して3D Angio画像生成などの各種画像演算を行う画像演算処理部162と、X線検出器111で取得した通常視野のX線画像上で、さらに高精細で観察したい関心領域(ROI)を設定するROI設定部163と、ROI設定部163で設定された領域の中心座標と、X線検出器111の画像中心との位置ずれを計算する位置ずれ計算部164と、位置ずれ計算部で計算された数値に基づき、Cアーム(もしくは寝台天板)を移動させ、ROIの中心をX線検出器111の画像中心に合わせるよう制御するセンタリング制御部165を有する。
【0020】
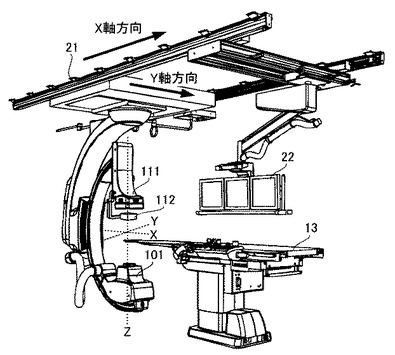
図2を用いて天井走行式Cアーム保持装置の構成を説明する。天井走行式Cアームはその名の通り天井にCアームを移動させるためのレール21が設置されそのレール21にCアーム保持装置12が吊り下げられて走行する。この走行方向(レール方向)をX軸方向とする。また、Cアーム保持装置12は、Cアームをレールの垂直方向に移動可能な機構を有していて、その方向をY軸方向とする。また、説明のため、寝台13の長手方向は、X軸方向に沿っているものとし、横手方向はY軸方向に沿っているものとする。さらに図2では、図3で後述するコンソール部とは別に、検査室内に医用画像を表示する表示モニタ22を有する。
【0021】
図1に示すコンソール部17は、通常、操作室に設置され、画像・情報処理部16に保存されている画像データの中から所望の画像データを表示する表示部171を備えている。また、被写体情報、撮影シーケンス条件、表示条件、およびX線照射条件などの諸条件の選択や設定、更には各種コマンドの入力等を行なう操作部172と、X線画像診断装置の各ユニットを統括して制御するシステム制御部173を有している。
【0022】
図3に示すように、表示部171は、画像・情報処理部16において生成された各種画像データの表示を行なうための透視モニタ31、また、ROIなどを設定したり、他のモダリティの画像表示を行う参照モニタ32、撮影条件などの入力やシステムを制御するための各種入力・設定画面を表示するシステムモニタ33を有する。
【0023】
また操作部172は、トラックボール、ジョイスティック、各種ボタンを有するメインコンソール34、キーボード35、マウス36などの入力デバイス、および図示しないがフットスイッチなどを備える。これらの入力インターフェイスにより、被写体情報の入力、X線照射条件や画像倍率の設定、「回転」撮影などの撮影シーケンス選択、撮像位置及び方向の設定、撮影開始コマンド等の各種コマンドの入力等が行なえる。
【0024】
また、システム制御部173は、図示しないCPUと記憶回路を備え、装置制御情報や、操作部172から入力された操作者のコマンド信号、および各種初期設定条件等の情報を一旦記憶した後、これらの情報に基づいてX線画像診断装置の各ユニットを統括的に制御する。
【0025】
次に図4のフローチャートを用いて高精細検出器112を使用するときの処理について説明する。まずステップST401では、被写体P(患者)を寝台13に横臥させる。次にステップST402では、操作者は寝台13の天板の高さ及び位置を調整し、Cアームを撮影部位に移動する。Cアームの移動はコンソール部17を使用し、システム制部173から駆動制御部を介してCアーム保持装置12を制御して行うことができる。撮影部位をCアームのアイソセンタに移動し、ステップST403では、通常視野を持つX線検出器111を使用してX線画像を取得する指示をコンソール部17から行う。このとき、高精細検出器112はX線検出器111前面から退避しておく。
【0026】
ステップST404では、システム制御部173は、撮影条件、操作命令に従い、X線発生部10から被写体Pに向けてX線を放射させ、X線検出部11にて検出した投影データを一旦保存した後、画像処理演算部162にてX線画像を生成し、透視モニタ31に表示する。
【0027】
ステップST405では、この透視モニタ31に表示されたX線画像と同じ画像を参照モニタ32に表示させ、高精細検出器112で表示・観察したいROIを設定する。
【0028】
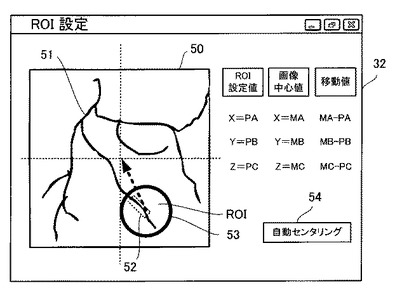
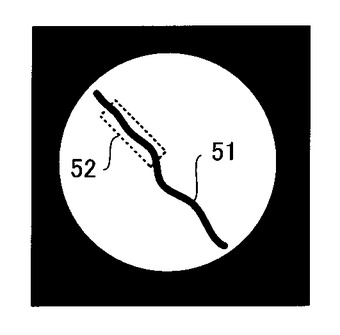
図4は、参照モニタ32で表示されるX線画面の一例を示したものである。この例ではX線画像50として血管51が観察されている。例えば、この血管51の一部にステント52が埋め込まれている場合、そのステント52の状態を観察しようとしても、通常視野のX線検出器111の倍率(解像度)では詳しくその状態を観察することができない。従って高精細検出器112を使用して詳しく観察する場合は、このX線画像50上に、高精細検出器の視野に相当する領域を示すマーカ53を表示させ、このマーカ53内にROIが入るようにコンソール部17のマウス30などを使用して設定する。
【0029】
ステップST406では、ROI設定が終了すると、マーカ53の中心位置(ROI設定値:X=PA、Y=PB、Z=PC)とX線画像50の中心位置の座標(X=MA、Y=MB、Z=MC)が参照モニタ32の画面の右側などに表示されるとともに、この両者の座標差(ΔX=MA−PA、ΔY=MB−PB、ΔZ=MC−PC)が合わせて表示される。この座標差は位置ずれ計算部164で計算され、この座標差に基づいてCアーム移動量が計算される。
【0030】
ステップST407では、このCアーム移動量に基づきCアームを移動させる自動センタリング動作を行う。例えば、図5の自動センタリングボタン54を押下することによって、図2の矢印で示すX軸方向とY軸方向に対してCアームをCアーム移動量分だけそれぞれ移動させる。これにより高精細検出器112は画像中心に移動する。なお、回転撮影をする場合などは、ROIがアイソセンタに一致するように天板の高さ(Z軸方向)も調整する。この天板の高さ制御は、被写体(患者)に内視鏡やカテーテルなどが装着されている場合、安全を考慮して手動で行うよう選択できる。以上の説明において、X線画像50の中心は、アイソセンタに一致するように設定されているものとする。
【0031】
ステップST408では、高精細検出器112をX線検出器111の前面にセットし、画像切換を行う。ステップST409では、図6に示すようにステップST405で設定したROIが拡大された高精細X線画像が透視モニタ31に表示される。
【0032】
以上述べたように、第1の実施形態によれば、通常サイズのX線検出器の画像上で高精細検出器の小視野サイズに対応したマーカを表示させ、このマーカによりROIの設定が行える。そして設定したROI位置がX線画像の中心に移動するように天井走行式Cアーム保持装置を自動追従させる機能を有している。これにより、従来、小型高精細検出器に切り換える時に手動で行っていた、位置決め作業が不要になり、使い勝手が向上し、手技効率の高いシステムを提供することが可能となる。
【0033】
さらにこの自動追従は、自動追従動作を開始する前に、Cアームの移動方向(移動量)を事前にモニタに表示するのでCアームが移動する方向や位置を事前に操作者に伝えることができるため、意図しないCアーム動作による干渉事故を未然に防ぐことができる。
【0034】
(第2の実施形態)
本実施形態では、床置き式5軸Cアーム保持装置を使用した場合について説明する。X線画像診断装置のブロック構成図は、図1と同じである。床置き式5軸Cアーム保持装置の構成図を図7に示す。床置き式5軸Cアーム保持装置は、既に図2に示した天井走行式Cアーム保持装置と同様に、Cアーム71の一端(ここでは下端)にX線発生部10が、又、他端(ここでは上端)にはX線検出部11 が対向して取り付けられて撮像系を構成している。X線検出器111の前面には高精細検出器112がアーム機構70を介して取り付けられている。高精細検出器を使用しない場合には、アーム機構70に形成された回転機構により退避することができる。
【0035】
Cアーム71は、アームホルダ72を介してスタンド73に保持されており、アームホルダ72の側面にはCアーム71が矢印aで示すスライド回転軸方向(回動軸Z1)にスライド自在に取り付けられている。一方、アームホルダ72は、スタンド73に対して矢印bで示したCアーム水平回転軸方向(回動軸Z2)を中心として回転自在に取りつけられ、このアームホルダ72の回転に伴ってCアーム71も回転軸Z1を中心として回転を行なう。そして、a方向に対するCアーム71のスライドとb方向に対するアームホルダ72の回転により、Cアーム71の両端部に取り付けられた撮像系は天板に載置された被写体に対して任意の角度位置に設定される。また、撮影軸(回転軸Z3)に対して撮像系はc方向に回転可能である。また、Z1軸、Z2軸、Z3軸の交点はアイソセンタISと呼ばれる回転中心であり、点線で示す画像中心線はアイソセンタISを通るように設定されている。
【0036】
一方、床面75には、床旋回アーム74が配置され、この床旋回アーム74の一端は床
面75に対し回転軸Z4でd方向に回転自在に取り付けられ、床旋回アーム74の他端には前記スタンド73が、回転軸Z5を中心にe方向に回転自在に取り付けられている。この場合、床旋回アーム74の回転軸Z5及びスタンド73の回動軸Z4は何れもZ軸方向に位置するように設定される。そして、回転軸Z4を中心とした床旋回アーム74の回転と、回転軸Z5を中心にとしてスタンド73の回転動作により、被写体Pに対して長手方向(X軸方向)及び横手方向(Y軸方向)への位置制御が可能となる。さらに撮影軸Z3を調整することにより、撮像系と被写体の相対角度も調整が可能となる
したがって、第1の実施形態で説明したステップST406で計算される座標差に対して回転軸Z3、Z4、Z5の回転角を制御することにより、ROI設定値をX線検出器の画像中心に移動させることが可能である。さらに、3D Angioなどの回転撮影を行う場合には、正確にアイソセンタISにROI中心を合わせるため、寝台13の高さも同時に制御を行う必要がある。なお、本実施形態では、回転軸Z3、Z4、Z5を用いて長手方向と、横手方向の調整を行うため、図5に示した移動量は、X軸、Y軸、Z軸の座標差に加え、各回転軸の移動角度を合わせて表示するのが好ましい。この場合、直観的にCアームの動きを理解するため、各回転軸の移動角度に加えてCアームの動作方向を示すグラフィカルな表示をしてもよい。
【0037】
また本実施形態の場合も被写体P(患者)に内視鏡やカテーテルなどが装着されている場合、安全を考慮して寝台13に天板高さ制御は手動で行うように選択できる。
【0038】
なお、寝台13の天板に長手方向および横手方向に駆動可能な制御機構がついている場合は、本実施形態のCアームを移動の方法ではなく、寝台13を移動させても本実施形態と同様な効果が得られる。これは図1に示す同構成によって実現可能であるが、被写体(患者)に内視鏡やカテーテルなどが装着されている場合は、安全を考慮してCアームを移動した方が望ましい。
【0039】
このように、第2の実施形態によれば、床置き式5軸アームにおいても第1の実施形態と同様の効果を奏する。
【0040】
(第3の実施形態)
第3の実施形態では、高精細検出器112のセットおよび退避を自動で行えるようにしたものである。図8に、本実施形態のX線画像診断装置のブロック構成図を示す。図1との違いは、機構駆動部15内に高精細検出器駆動部154と、高精細検出器112を支持するアーム機構70に高精細検出器駆動部154によって制御されるモータ113を新たに設けている点である。
【0041】
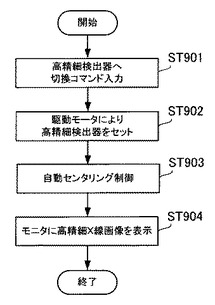
図9は、高精細検出器112への自動切換制御のフローチャートを示している。このフローチャートによって高精細検出器112をX線検出器111前面に自動的にセットする。また、この動作は、第1および第2の実施形態で述べた自動センタリング制御と合わせて行うと利便性がよい。従って図5に示す自動センタリングボタン54を押すことによって、高精細検出器112のセットと、設定ROIに対する自動センタリング制御が同時に行われるようにしてもよい。
【0042】
ステップST901では、高精細検出器112に切換を行う切換コマンドをコンソール部17より行う。ステップST902では、この切換コマンドによってモータ113を制御し、高精細検出器112をX線検出器111の前面にセットする。
【0043】
ステップST903では、設定したROIに対して自動センタリング制御を行う。なお、自動センタリング制御が不要な場合はこのステップをスキップしてよい。ステップST904では、透視モニタ31に高精細検出器の高精細X線画像を表示する。
【0044】
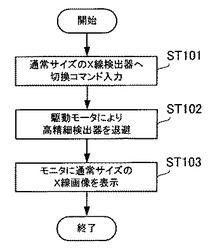
また、図10は通常視野のX線検出器111への自動切換制御のフローチャートを示している。このフローチャートによって高精細検出器112をX線検出器111前面から自動的に退避する。
【0045】
ステップST101では、X線検出器111に切換を行う切換コマンドをコンソール部17より行う。ステップST102では、この切換コマンドによってモータ113を制御し、高精細検出器112をX線検出器111の前面から退避する。
【0046】
ステップST103では、透視モニタ31にX線検出器の元画像を再表示する。このステップは撮影条件の変更などによって再表示が不要な場合はスキップし、高精細検出器112の退避(ST102)で終了する。
【0047】
以上説明したように、第3の実施形態によれば、高精細検出器112のセットおよび退避を自動で行え、さらに自動センタリング制御と合わせて行うことができるので利便性がよく、手技効率の高いシステムを提供することが可能となる。
【0048】
以上述べたように本実施形態のX線画像診断装置によれば、通常サイズのX線検出器の画像上で高精細検出器の小視野サイズに対応したROIを表示させ、コンソールからROIの選択が行える。また、設定したROI位置がX線検出器の画像中心に移動するようにCアーム保持装置を自動追従させるセンタリング機能を有している。これにより、従来、小型高精細検出器に切り換え時に手動で行っていた、医師らによるマニュアルでの位置決め作業が不要になるため使い勝手が向上し、手技効率の高いシステムを提供することが可能となる。
【0049】
さらにこの自動追従は、自動追従動作を開始する前に、Cアームの移動方向(移動量)を事前にモニタに表示するのでCアームが移動する方向や位置を事前に操作者に伝えることができるため、意図しないCアーム動作による干渉事故を未然に防ぐことができる。
【0050】
本発明は、上記実施態様に限定されるものではなく、種々の変形が可能である。例えば上記実施形態で示したCアームの形状は例示にすぎず、バイプレーン型のCアームでも適用可能である。また、X線画像は、透視画像、3D−Angioのように3次元画像に再構成された画像、および斜め入射で撮影された画像などにおいても同様に実施可能である。
【0051】
本発明のいくつかの実施形態を説明したが、これらの実施形態は、例として提示したものであり、発明の範囲を限定することは意図していない。これら新規な実施形態は、その他の様々な形態で実施されることが可能であり、発明の要旨を逸脱しない範囲で、種々の省略、置き換え、変更を行うことができる。これら実施形態やその変形は、発明の範囲や要旨に含まれるとともに、特許請求の範囲に記載された発明とその均等の範囲に含まれる。
【符号の説明】
【0052】
10…X線発生部
11…X線検出部、
12…Cアーム保持装置、
13…寝台(天板)、
14…X線高圧発生部、
15…機構駆動部、
16…画像・情報駆動部、
17…コンソール部、
53…マーカ、
101…X線管、
102…X線絞り器、
111…X線検出器、
112…高精細検出器、
113…モータ、
151…Cアーム駆動部、
152…天板駆動部、
154…高精細検出器駆動部、
161…画像データ記憶部、
162…画像演算処理部、
163…ROI設定部、
164…位置ずれ計算部、
165…センタリング制御部、
171…表示部、
172…操作部、
173…システム制御部。
【技術分野】
【0001】
本発明の実施形態は、X線画像診断装置に関する。
【背景技術】
【0002】
従来、Cアーム形保持装置を有するX線画像診断装置では、Cアームの両端に一対のX線発生部とX線検出部を対向する形で搭載させ、X線検出器(I.I.:Image IntensifierあるいはFPD:Flat Panel Detector)の大きさや視野サイズ切り換えの設定値に応じて、透視画像および撮影画像を表示モニタに表示させることができる。
【0003】
近年、このCアーム形保持装置のX線検出部に、8〜12インチ程度の画面サイズを持つX線検出器に加えて小形高精細検出器も搭載し、病変部などの小さな関心領域(ROI:Region of Interest)のより鮮明な画像を得ることで診断・治療手技のレベルを上げる取組みが実施されている。(例えば2つのX線検出器を持つものとして特許文献1がある。)
このような2つのX線検出器を有する装置では、必要に応じて通常視野サイズのX線検出器の前面に小視野サイズの小形高精細検出器を配置して高精細画像を収集し、不必要な場合にはこれを退避する切換えアーム機構をX線検出部に設ける構造のものがある。
【0004】
この小視野サイズの小形高精細検出器を搭載するX線画像診断装置において、通常サイズのX線検出器から小型高精細検出器に切り換えると視野サイズが小さくなる。従って予めROIに画像中心を合わせてから小視野サイズに切り換えるか、切り換えた後にROIが小視野サイズ内に入るようにCアームを動かしたり、寝台を動かしたりして調整する必要があるが、これでは使い勝手が悪く手技効率の面で問題がある。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】米国特許第6285739号明細書
【発明の概要】
【発明が解決しようとする課題】
【0006】
本発明が解決しようとする課題は、上記問題を解決し、視野の狭い小型高精細検出器を使用しても検査の迅速化が可能なX線画像診断装置を提供することである。
【課題を解決するための手段】
【0007】
上記課題を達成するために、実施形態のX線画像診断装置は、第1の視野サイズを有するX線検出器および前記X線検出器より高解像度でかつ小視野な第2の視野サイズを有する高精細検出器で構成されるX線検出部と、被写体に照射するX線を発生するX線発生部と、このX線発生部に対向して配置されるX線検出部で構成される撮像系が回転可能に設けられたCアーム保持装置と、前記前記Cアーム保持装置の位置を制御するCアーム駆動部と、前記X線検出器と前記高精細検出器で被写体のX線画像を生成する画像演算処理部と、前記第1の視野サイズのX線画像上で前記第2の視野サイズに相当するマーカをROI設定画面に表示し、このマーカをROIに移動して前記ROIを設定するROI設定部と、前記第1の視野サイズのX線画像の中心位置と前記マーカの中心位置の座標差を求める位置ずれ計算部と、前記Cアーム駆動部を制御し、前記座標差に基づいて前記ROIの中心位置を前記第1の視野サイズのX線画像の中心に移動するセンタリング制御部と、を有する。
【図面の簡単な説明】
【0008】
【図1】第1の実施形態に係るX線画像診断装置のブロック構成図。
【図2】同実施形態に係るX線画像診断装置の天井走行式Cアーム保持装置の構成図。
【図3】同実施形態におけるコンソールの一例を示す図。
【図4】同実施形態における高精細検出器使用時のフローチャート図。
【図5】同実施形態におけるROI設定の説明図。
【図6】同実施形態におけるROI設定後の高精細検出器の透視画像例。
【図7】第2の実施形態におけるX線画像診断装置の床置き式5軸Cアーム保持装置の構成図。
【図8】第3の実施形態に係るX線画像診断装置のブロック構成図。
【図9】同実施形態における高精細検出器への自動切換制御のフローチャート図。
【図10】同実施形態におけるX線検出器への自動切換制御のフローチャート図。
【発明を実施するための形態】
【0009】
以下、発明を実施するための実施形態について図1から図10に示す図面を参照しながら詳細に説明する。
【0010】
(第1の実施形態)
以下に述べる実施形態では、X線発生部及びX線検出部を端部に備えたCアームを回転自在に取り付けたX線画像診断装置について説明する。まずX線画像診断装置の構成につき図1乃至図3を用いて説明する。図1は、X線画像診断装置の全体構成を示すブロック図である。図2は、天井走行式Cアーム保持装置を有するX線画像診断装置の構成図である。図3はコンソール部の構成を示す。
【0011】
本実施形態におけるX線画像診断装置は、Cアームを有し、X線を被写体Pに対して照射するX線発生部10と、被写体Pを透過したX線を2次元的に検出するX線検出部11と、X線発生部10とX線検出部11を保持するCアーム保持装置12と、被写体Pを載置する寝台13と、X線発生部10におけるX線照射に必要な高電圧を発生する高電圧発生部14を備えている。
【0012】
また、Cアーム保持装置12で保持されるCアームの位置制御および回転制御や、寝台13の移動制御に対して制御を行う機構駆動部15と、X線検出部11において検出された被写体Pの投影データに基づいてX線画像データの生成や保存、および各種演算を行なう画像・情報処理部16と、このX線画像診断装置の操作、制御、表示を行うコンソール部17を備えている。
【0013】
X線発生部10は、被写体Pに対しX線を照射するX線管101と、X線管101から照射されたX線に対してX線錘(コーンビーム)を形成するX線絞り器102を備えている。X線管101は、X線を発生する真空管であり、陰極(フィラメント)より放出された熱電子を高電圧によって加速させ、この加速電子をタングステン陽極に衝突させることでX線を発生させる。一方、X線絞り器102は、X線管101と被写体Pの間に位置し、X線管101から照射されたX線ビームを所定の照射サイズに絞り込む機能を有しており、X線検出部11に複数のX線検出器を含む本実施形態においては、X線検出器の切り替えの際にそれぞれのX線検出器の視野サイズに対応した照射サイズの絞り込みを自動的に行うことができる。
【0014】
X線検出部11は、被写体Pを透過したX線を電荷に変換して蓄積する平面状のX線検出器111(FPD)と、高精細検出器112を有する。この高精細検出器112は、FPDで観測した部位の一部に対してさらに高精細な画像を取得する。高精細検出器112はX線検出部11前面に配置できるようにアーム等で支持され、不必要な場合にはこれを退避可能とする切換え機構が形成される。尚、図示しないが、X線検出部11はX線検出器111および高精細検出器112に蓄積された電荷を読み出し、読み出された電荷からX線投影データを生成する投影データ生成部などを備えている。
【0015】
X線検出器111は、例えばFPDで構成する。FPDのパネルの大きさは特殊なものを除いて通常8〜12インチである。微小な検出素子を列方向及びライン方向に2次元的に配列して構成されており、各々の検出素子はX線を感知し、入射X線量に応じて電荷を生成する光電膜と、この光電膜に発生した電荷を蓄積する電荷蓄積コンデンサと、電荷蓄積コンデンサに蓄積された電荷を所定のタイミングで読み出すTFT薄膜トランジスタから構成されている。
【0016】
高精細検出器112は、FPDに比べて高精細(高解像度)であるが、視野が狭い検出器である。その視野は直径20〜30mm程度の円形状である。この高精細検出器112は、単結晶Si基板上に形成されたCCD(Charge Coupled Device)上にシンチレータを形成し、その視野サイズは単結晶Si基板の大きさで決定されるため大面積のものを製作するのが困難である。
【0017】
高電圧発生部14は、X線管101の陰極から発生する熱電子を加速するために、陽極と陰極の間に印加する高電圧を発生させる高電圧発生器141と、システム制御部19の指示信号に従い、高電圧発生器141における管電流、管電圧、照射時間等のX線照射条件の制御を行なうX線制御部142を備えている。
【0018】
機構駆動部15は、Cアーム保持装置12に設けられたスライド機構、回転機構及び移動機構に対し駆動信号を供給するCアーム駆動部151と、寝台13の天板を長手方向あるいは横手方向への移動を行なうための駆動信号を供給する天板駆動部152と、これらCアーム駆動部151及び天板駆動部152を制御する駆動制御部153を備えている。
【0019】
画像・情報処理部16は、X線検出器111の投影データなどの画像データを一時的または永久的に記憶する画像データ記憶部161と、画像データ記憶部161から所望の画像データを取得して3D Angio画像生成などの各種画像演算を行う画像演算処理部162と、X線検出器111で取得した通常視野のX線画像上で、さらに高精細で観察したい関心領域(ROI)を設定するROI設定部163と、ROI設定部163で設定された領域の中心座標と、X線検出器111の画像中心との位置ずれを計算する位置ずれ計算部164と、位置ずれ計算部で計算された数値に基づき、Cアーム(もしくは寝台天板)を移動させ、ROIの中心をX線検出器111の画像中心に合わせるよう制御するセンタリング制御部165を有する。
【0020】
図2を用いて天井走行式Cアーム保持装置の構成を説明する。天井走行式Cアームはその名の通り天井にCアームを移動させるためのレール21が設置されそのレール21にCアーム保持装置12が吊り下げられて走行する。この走行方向(レール方向)をX軸方向とする。また、Cアーム保持装置12は、Cアームをレールの垂直方向に移動可能な機構を有していて、その方向をY軸方向とする。また、説明のため、寝台13の長手方向は、X軸方向に沿っているものとし、横手方向はY軸方向に沿っているものとする。さらに図2では、図3で後述するコンソール部とは別に、検査室内に医用画像を表示する表示モニタ22を有する。
【0021】
図1に示すコンソール部17は、通常、操作室に設置され、画像・情報処理部16に保存されている画像データの中から所望の画像データを表示する表示部171を備えている。また、被写体情報、撮影シーケンス条件、表示条件、およびX線照射条件などの諸条件の選択や設定、更には各種コマンドの入力等を行なう操作部172と、X線画像診断装置の各ユニットを統括して制御するシステム制御部173を有している。
【0022】
図3に示すように、表示部171は、画像・情報処理部16において生成された各種画像データの表示を行なうための透視モニタ31、また、ROIなどを設定したり、他のモダリティの画像表示を行う参照モニタ32、撮影条件などの入力やシステムを制御するための各種入力・設定画面を表示するシステムモニタ33を有する。
【0023】
また操作部172は、トラックボール、ジョイスティック、各種ボタンを有するメインコンソール34、キーボード35、マウス36などの入力デバイス、および図示しないがフットスイッチなどを備える。これらの入力インターフェイスにより、被写体情報の入力、X線照射条件や画像倍率の設定、「回転」撮影などの撮影シーケンス選択、撮像位置及び方向の設定、撮影開始コマンド等の各種コマンドの入力等が行なえる。
【0024】
また、システム制御部173は、図示しないCPUと記憶回路を備え、装置制御情報や、操作部172から入力された操作者のコマンド信号、および各種初期設定条件等の情報を一旦記憶した後、これらの情報に基づいてX線画像診断装置の各ユニットを統括的に制御する。
【0025】
次に図4のフローチャートを用いて高精細検出器112を使用するときの処理について説明する。まずステップST401では、被写体P(患者)を寝台13に横臥させる。次にステップST402では、操作者は寝台13の天板の高さ及び位置を調整し、Cアームを撮影部位に移動する。Cアームの移動はコンソール部17を使用し、システム制部173から駆動制御部を介してCアーム保持装置12を制御して行うことができる。撮影部位をCアームのアイソセンタに移動し、ステップST403では、通常視野を持つX線検出器111を使用してX線画像を取得する指示をコンソール部17から行う。このとき、高精細検出器112はX線検出器111前面から退避しておく。
【0026】
ステップST404では、システム制御部173は、撮影条件、操作命令に従い、X線発生部10から被写体Pに向けてX線を放射させ、X線検出部11にて検出した投影データを一旦保存した後、画像処理演算部162にてX線画像を生成し、透視モニタ31に表示する。
【0027】
ステップST405では、この透視モニタ31に表示されたX線画像と同じ画像を参照モニタ32に表示させ、高精細検出器112で表示・観察したいROIを設定する。
【0028】
図4は、参照モニタ32で表示されるX線画面の一例を示したものである。この例ではX線画像50として血管51が観察されている。例えば、この血管51の一部にステント52が埋め込まれている場合、そのステント52の状態を観察しようとしても、通常視野のX線検出器111の倍率(解像度)では詳しくその状態を観察することができない。従って高精細検出器112を使用して詳しく観察する場合は、このX線画像50上に、高精細検出器の視野に相当する領域を示すマーカ53を表示させ、このマーカ53内にROIが入るようにコンソール部17のマウス30などを使用して設定する。
【0029】
ステップST406では、ROI設定が終了すると、マーカ53の中心位置(ROI設定値:X=PA、Y=PB、Z=PC)とX線画像50の中心位置の座標(X=MA、Y=MB、Z=MC)が参照モニタ32の画面の右側などに表示されるとともに、この両者の座標差(ΔX=MA−PA、ΔY=MB−PB、ΔZ=MC−PC)が合わせて表示される。この座標差は位置ずれ計算部164で計算され、この座標差に基づいてCアーム移動量が計算される。
【0030】
ステップST407では、このCアーム移動量に基づきCアームを移動させる自動センタリング動作を行う。例えば、図5の自動センタリングボタン54を押下することによって、図2の矢印で示すX軸方向とY軸方向に対してCアームをCアーム移動量分だけそれぞれ移動させる。これにより高精細検出器112は画像中心に移動する。なお、回転撮影をする場合などは、ROIがアイソセンタに一致するように天板の高さ(Z軸方向)も調整する。この天板の高さ制御は、被写体(患者)に内視鏡やカテーテルなどが装着されている場合、安全を考慮して手動で行うよう選択できる。以上の説明において、X線画像50の中心は、アイソセンタに一致するように設定されているものとする。
【0031】
ステップST408では、高精細検出器112をX線検出器111の前面にセットし、画像切換を行う。ステップST409では、図6に示すようにステップST405で設定したROIが拡大された高精細X線画像が透視モニタ31に表示される。
【0032】
以上述べたように、第1の実施形態によれば、通常サイズのX線検出器の画像上で高精細検出器の小視野サイズに対応したマーカを表示させ、このマーカによりROIの設定が行える。そして設定したROI位置がX線画像の中心に移動するように天井走行式Cアーム保持装置を自動追従させる機能を有している。これにより、従来、小型高精細検出器に切り換える時に手動で行っていた、位置決め作業が不要になり、使い勝手が向上し、手技効率の高いシステムを提供することが可能となる。
【0033】
さらにこの自動追従は、自動追従動作を開始する前に、Cアームの移動方向(移動量)を事前にモニタに表示するのでCアームが移動する方向や位置を事前に操作者に伝えることができるため、意図しないCアーム動作による干渉事故を未然に防ぐことができる。
【0034】
(第2の実施形態)
本実施形態では、床置き式5軸Cアーム保持装置を使用した場合について説明する。X線画像診断装置のブロック構成図は、図1と同じである。床置き式5軸Cアーム保持装置の構成図を図7に示す。床置き式5軸Cアーム保持装置は、既に図2に示した天井走行式Cアーム保持装置と同様に、Cアーム71の一端(ここでは下端)にX線発生部10が、又、他端(ここでは上端)にはX線検出部11 が対向して取り付けられて撮像系を構成している。X線検出器111の前面には高精細検出器112がアーム機構70を介して取り付けられている。高精細検出器を使用しない場合には、アーム機構70に形成された回転機構により退避することができる。
【0035】
Cアーム71は、アームホルダ72を介してスタンド73に保持されており、アームホルダ72の側面にはCアーム71が矢印aで示すスライド回転軸方向(回動軸Z1)にスライド自在に取り付けられている。一方、アームホルダ72は、スタンド73に対して矢印bで示したCアーム水平回転軸方向(回動軸Z2)を中心として回転自在に取りつけられ、このアームホルダ72の回転に伴ってCアーム71も回転軸Z1を中心として回転を行なう。そして、a方向に対するCアーム71のスライドとb方向に対するアームホルダ72の回転により、Cアーム71の両端部に取り付けられた撮像系は天板に載置された被写体に対して任意の角度位置に設定される。また、撮影軸(回転軸Z3)に対して撮像系はc方向に回転可能である。また、Z1軸、Z2軸、Z3軸の交点はアイソセンタISと呼ばれる回転中心であり、点線で示す画像中心線はアイソセンタISを通るように設定されている。
【0036】
一方、床面75には、床旋回アーム74が配置され、この床旋回アーム74の一端は床
面75に対し回転軸Z4でd方向に回転自在に取り付けられ、床旋回アーム74の他端には前記スタンド73が、回転軸Z5を中心にe方向に回転自在に取り付けられている。この場合、床旋回アーム74の回転軸Z5及びスタンド73の回動軸Z4は何れもZ軸方向に位置するように設定される。そして、回転軸Z4を中心とした床旋回アーム74の回転と、回転軸Z5を中心にとしてスタンド73の回転動作により、被写体Pに対して長手方向(X軸方向)及び横手方向(Y軸方向)への位置制御が可能となる。さらに撮影軸Z3を調整することにより、撮像系と被写体の相対角度も調整が可能となる
したがって、第1の実施形態で説明したステップST406で計算される座標差に対して回転軸Z3、Z4、Z5の回転角を制御することにより、ROI設定値をX線検出器の画像中心に移動させることが可能である。さらに、3D Angioなどの回転撮影を行う場合には、正確にアイソセンタISにROI中心を合わせるため、寝台13の高さも同時に制御を行う必要がある。なお、本実施形態では、回転軸Z3、Z4、Z5を用いて長手方向と、横手方向の調整を行うため、図5に示した移動量は、X軸、Y軸、Z軸の座標差に加え、各回転軸の移動角度を合わせて表示するのが好ましい。この場合、直観的にCアームの動きを理解するため、各回転軸の移動角度に加えてCアームの動作方向を示すグラフィカルな表示をしてもよい。
【0037】
また本実施形態の場合も被写体P(患者)に内視鏡やカテーテルなどが装着されている場合、安全を考慮して寝台13に天板高さ制御は手動で行うように選択できる。
【0038】
なお、寝台13の天板に長手方向および横手方向に駆動可能な制御機構がついている場合は、本実施形態のCアームを移動の方法ではなく、寝台13を移動させても本実施形態と同様な効果が得られる。これは図1に示す同構成によって実現可能であるが、被写体(患者)に内視鏡やカテーテルなどが装着されている場合は、安全を考慮してCアームを移動した方が望ましい。
【0039】
このように、第2の実施形態によれば、床置き式5軸アームにおいても第1の実施形態と同様の効果を奏する。
【0040】
(第3の実施形態)
第3の実施形態では、高精細検出器112のセットおよび退避を自動で行えるようにしたものである。図8に、本実施形態のX線画像診断装置のブロック構成図を示す。図1との違いは、機構駆動部15内に高精細検出器駆動部154と、高精細検出器112を支持するアーム機構70に高精細検出器駆動部154によって制御されるモータ113を新たに設けている点である。
【0041】
図9は、高精細検出器112への自動切換制御のフローチャートを示している。このフローチャートによって高精細検出器112をX線検出器111前面に自動的にセットする。また、この動作は、第1および第2の実施形態で述べた自動センタリング制御と合わせて行うと利便性がよい。従って図5に示す自動センタリングボタン54を押すことによって、高精細検出器112のセットと、設定ROIに対する自動センタリング制御が同時に行われるようにしてもよい。
【0042】
ステップST901では、高精細検出器112に切換を行う切換コマンドをコンソール部17より行う。ステップST902では、この切換コマンドによってモータ113を制御し、高精細検出器112をX線検出器111の前面にセットする。
【0043】
ステップST903では、設定したROIに対して自動センタリング制御を行う。なお、自動センタリング制御が不要な場合はこのステップをスキップしてよい。ステップST904では、透視モニタ31に高精細検出器の高精細X線画像を表示する。
【0044】
また、図10は通常視野のX線検出器111への自動切換制御のフローチャートを示している。このフローチャートによって高精細検出器112をX線検出器111前面から自動的に退避する。
【0045】
ステップST101では、X線検出器111に切換を行う切換コマンドをコンソール部17より行う。ステップST102では、この切換コマンドによってモータ113を制御し、高精細検出器112をX線検出器111の前面から退避する。
【0046】
ステップST103では、透視モニタ31にX線検出器の元画像を再表示する。このステップは撮影条件の変更などによって再表示が不要な場合はスキップし、高精細検出器112の退避(ST102)で終了する。
【0047】
以上説明したように、第3の実施形態によれば、高精細検出器112のセットおよび退避を自動で行え、さらに自動センタリング制御と合わせて行うことができるので利便性がよく、手技効率の高いシステムを提供することが可能となる。
【0048】
以上述べたように本実施形態のX線画像診断装置によれば、通常サイズのX線検出器の画像上で高精細検出器の小視野サイズに対応したROIを表示させ、コンソールからROIの選択が行える。また、設定したROI位置がX線検出器の画像中心に移動するようにCアーム保持装置を自動追従させるセンタリング機能を有している。これにより、従来、小型高精細検出器に切り換え時に手動で行っていた、医師らによるマニュアルでの位置決め作業が不要になるため使い勝手が向上し、手技効率の高いシステムを提供することが可能となる。
【0049】
さらにこの自動追従は、自動追従動作を開始する前に、Cアームの移動方向(移動量)を事前にモニタに表示するのでCアームが移動する方向や位置を事前に操作者に伝えることができるため、意図しないCアーム動作による干渉事故を未然に防ぐことができる。
【0050】
本発明は、上記実施態様に限定されるものではなく、種々の変形が可能である。例えば上記実施形態で示したCアームの形状は例示にすぎず、バイプレーン型のCアームでも適用可能である。また、X線画像は、透視画像、3D−Angioのように3次元画像に再構成された画像、および斜め入射で撮影された画像などにおいても同様に実施可能である。
【0051】
本発明のいくつかの実施形態を説明したが、これらの実施形態は、例として提示したものであり、発明の範囲を限定することは意図していない。これら新規な実施形態は、その他の様々な形態で実施されることが可能であり、発明の要旨を逸脱しない範囲で、種々の省略、置き換え、変更を行うことができる。これら実施形態やその変形は、発明の範囲や要旨に含まれるとともに、特許請求の範囲に記載された発明とその均等の範囲に含まれる。
【符号の説明】
【0052】
10…X線発生部
11…X線検出部、
12…Cアーム保持装置、
13…寝台(天板)、
14…X線高圧発生部、
15…機構駆動部、
16…画像・情報駆動部、
17…コンソール部、
53…マーカ、
101…X線管、
102…X線絞り器、
111…X線検出器、
112…高精細検出器、
113…モータ、
151…Cアーム駆動部、
152…天板駆動部、
154…高精細検出器駆動部、
161…画像データ記憶部、
162…画像演算処理部、
163…ROI設定部、
164…位置ずれ計算部、
165…センタリング制御部、
171…表示部、
172…操作部、
173…システム制御部。
【特許請求の範囲】
【請求項1】
第1の視野サイズを有するX線検出器および前記X線検出器より高解像度でかつ小視野な第2の視野サイズを有する高精細検出器で構成されるX線検出部と、
被写体に照射するX線を発生するX線発生部と、このX線発生部に対向して配置されるX線検出部で構成される撮像系が回転可能に設けられたCアーム保持装置と、
前記前記Cアーム保持装置の位置を制御するCアーム駆動部と、
前記X線検出器と前記高精細検出器で被写体のX線画像を生成する画像演算処理部と、
前記第1の視野サイズのX線画像上で前記第2の視野サイズに相当するマーカをROI設定画面に表示し、このマーカをROIに移動して前記ROIを設定するROI設定部と、
前記第1の視野サイズのX線画像の中心位置と前記マーカの中心位置の座標差を求める位置ずれ計算部と、
前記Cアーム駆動部を制御し、前記座標差に基づいて前記ROIの中心位置を前記第1の視野サイズのX線画像の中心に移動するセンタリング制御部と、
を有するX線画像診断装置。
【請求項2】
第1の視野サイズを有するX線検出器および前記X線検出器より高解像度でかつ小視野な第2の視野サイズを有する高精細検出器で構成されるX線検出部と、
被写体に照射するX線を発生するX線発生部と、このX線発生部に対向して配置されるX線検出部で構成される撮像系が回転可能に設けられたCアーム保持装置と、
前記X線発生部と前記X線検出部の間に配置される寝台と、
前記Cアーム保持装置の位置を制御するCアーム駆動部と、
前記寝台の天板位置を制御する天板駆動部と、
前記X線検出器と前記高精細検出器で被写体のX線画像を生成する画像演算処理部と、
前記第1の視野サイズのX線画像上で前記第2の視野サイズに相当するマーカをROI設定画面に表示し、このマーカをROIに移動して前記ROIを設定するROI設定部と、
前記第1の視野サイズのX線画像の中心位置と前記マーカの中心位置の座標差を求める位置ずれ計算部と、
前記Cアーム駆動部と天板駆動部を制御し、前記座標差に基づいて前記ROIの中心位置を前記第1の視野サイズのX線画像の中心に移動するセンタリング制御部と、
を有するX線画像診断装置。
【請求項3】
位置ずれ計算部で計算された前記座標差をさらに前記ROI設定画面に表示する請求項1または2記載のX線画像診断装置。
【請求項4】
前記X線検出器はFPDである請求項3記載のX線画像診断装置。
【請求項5】
前記X線検出器前面に前記高精細検出器を支持する支持機構と、
前記高精細検出器を前記X線検出器前面から退避可能にする前記支持機構に設けられた退避機構と、
をさらに有する請求項4記載のX線画像診断装置。
【請求項6】
前記第1の視野サイズのX線画像の中心位置を前記ROIの中心位置に移動するセンタリング制御時に、前記支持機構に設けられた退避機構を制御し、前記X線検出器から前記高精細検出器への切換を行う高精細検出器駆動部をさらに有する請求項5記載のX線画像診断装置。
【請求項1】
第1の視野サイズを有するX線検出器および前記X線検出器より高解像度でかつ小視野な第2の視野サイズを有する高精細検出器で構成されるX線検出部と、
被写体に照射するX線を発生するX線発生部と、このX線発生部に対向して配置されるX線検出部で構成される撮像系が回転可能に設けられたCアーム保持装置と、
前記前記Cアーム保持装置の位置を制御するCアーム駆動部と、
前記X線検出器と前記高精細検出器で被写体のX線画像を生成する画像演算処理部と、
前記第1の視野サイズのX線画像上で前記第2の視野サイズに相当するマーカをROI設定画面に表示し、このマーカをROIに移動して前記ROIを設定するROI設定部と、
前記第1の視野サイズのX線画像の中心位置と前記マーカの中心位置の座標差を求める位置ずれ計算部と、
前記Cアーム駆動部を制御し、前記座標差に基づいて前記ROIの中心位置を前記第1の視野サイズのX線画像の中心に移動するセンタリング制御部と、
を有するX線画像診断装置。
【請求項2】
第1の視野サイズを有するX線検出器および前記X線検出器より高解像度でかつ小視野な第2の視野サイズを有する高精細検出器で構成されるX線検出部と、
被写体に照射するX線を発生するX線発生部と、このX線発生部に対向して配置されるX線検出部で構成される撮像系が回転可能に設けられたCアーム保持装置と、
前記X線発生部と前記X線検出部の間に配置される寝台と、
前記Cアーム保持装置の位置を制御するCアーム駆動部と、
前記寝台の天板位置を制御する天板駆動部と、
前記X線検出器と前記高精細検出器で被写体のX線画像を生成する画像演算処理部と、
前記第1の視野サイズのX線画像上で前記第2の視野サイズに相当するマーカをROI設定画面に表示し、このマーカをROIに移動して前記ROIを設定するROI設定部と、
前記第1の視野サイズのX線画像の中心位置と前記マーカの中心位置の座標差を求める位置ずれ計算部と、
前記Cアーム駆動部と天板駆動部を制御し、前記座標差に基づいて前記ROIの中心位置を前記第1の視野サイズのX線画像の中心に移動するセンタリング制御部と、
を有するX線画像診断装置。
【請求項3】
位置ずれ計算部で計算された前記座標差をさらに前記ROI設定画面に表示する請求項1または2記載のX線画像診断装置。
【請求項4】
前記X線検出器はFPDである請求項3記載のX線画像診断装置。
【請求項5】
前記X線検出器前面に前記高精細検出器を支持する支持機構と、
前記高精細検出器を前記X線検出器前面から退避可能にする前記支持機構に設けられた退避機構と、
をさらに有する請求項4記載のX線画像診断装置。
【請求項6】
前記第1の視野サイズのX線画像の中心位置を前記ROIの中心位置に移動するセンタリング制御時に、前記支持機構に設けられた退避機構を制御し、前記X線検出器から前記高精細検出器への切換を行う高精細検出器駆動部をさらに有する請求項5記載のX線画像診断装置。
【図1】


【図2】
【図3】

【図4】

【図5】
【図6】
【図7】

【図8】
【図9】
【図10】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【公開番号】特開2012−223479(P2012−223479A)
【公開日】平成24年11月15日(2012.11.15)
【国際特許分類】
【出願番号】特願2011−95881(P2011−95881)
【出願日】平成23年4月22日(2011.4.22)
【出願人】(000003078)株式会社東芝 (54,554)
【出願人】(594164542)東芝メディカルシステムズ株式会社 (4,066)
【出願人】(594164531)東芝医用システムエンジニアリング株式会社 (892)
【Fターム(参考)】
【公開日】平成24年11月15日(2012.11.15)
【国際特許分類】
【出願日】平成23年4月22日(2011.4.22)
【出願人】(000003078)株式会社東芝 (54,554)
【出願人】(594164542)東芝メディカルシステムズ株式会社 (4,066)
【出願人】(594164531)東芝医用システムエンジニアリング株式会社 (892)
【Fターム(参考)】
[ Back to top ]