
Fターム[2C150CA02]の内容
Fターム[2C150CA02]に分類される特許
221 - 240 / 322
風船及びその製造方法

【課題】本発明は、ユーザの要望に応じて風船の形状及び画像を自由に作成することができる風船及びその製造方法を提供することを目的とするものである。
【解決手段】風船は、表面に画像10が記録された第一シート体1と、第一シート体1の裏面に接着された第二シート体2からなり、両シート体の外形は同じ形状に形成され、外形の全周にわたって接着領域4が帯状に形成されている。そして、第一シート体1及び第二シート体2との間に形成された内部空間には離型シート体3が挟持されており、離型シート体3の外周に沿って接着領域4が形成されている。接着領域4には、接着領域4を貫通して内部空間と連通する吹込み口部40が形成されている。吹込み口部40は、周囲のシート体を絞るように巻かれて内部のガスが漏れないように接着テープ等により密封されている。
(もっと読む)
マスコット袋

【課題】 マスコットの内部に袋を収納することができると共に、その袋とマスコットとを紐状体で連結して、使い勝手のよいものとすること。
【解決手段】 紐状体6の一端側をマスコット3の挿通孔に挿通すると共に、その紐状体6の他端側を袋4に係止し、袋4をマスコット3の開口2から中空内に挿脱自在に挿入できるようにする。
(もっと読む)
ロボットシステム
【課題】取り扱いが容易でかつ一般社会で十分に活用されるロボットを備えた安価なロボットシステムを提供することである。
【解決手段】携帯電話30が充電器20にセットされると、携帯電話30のコネクタCN2が充電器20のコネクタCN1に電気的に接続される。それにより、携帯電話30と充電器20との間で各種信号および電力が伝送される。CPU32は、充電器20の脱着センサ21、充電器20の充電容量センサ22および時計モジュール34からの信号を受け、メモリ33に記憶された通信制御プログラムに従って通信モジュール31を制御するとともに、メモリ33に記憶されたロボット制御プログラムに従ってロボット10を制御する。
(もっと読む)
弾性を有する末端部を備えるビロード人形並びにその製造方法
【課題】 弾性ゲルをビロード製玩具の織布製外皮に接合する改良された技術の提供。
【解決手段】 本発明は、玩具人形アセンブリとその製造方法を提供する。玩具人形は、外面に現れる外面部を有する本体構造部を備える。人形の外面に現れる外面部は、織布材からなる少なくとも1つの第1セクションと、弾性ゲル材からなる少なくとも1つの第2セクションを備える。第1セクションと第2セクションは少なくとも1つの共通シーム部に沿って接続する。織布材及び弾性ゲル材から玩具人形を形成することにより、対照的な触感的特性を備える外面を備える玩具人形を形成可能となる。これにより玩具人形の遊戯具としての価値が高まることとなる。
(もっと読む)
ペット型ロボット
【課題】安価で広範な種類の四足動物を模したペット型ロボットを楽しむことができる外皮被着構造を備えたペット型ロボットを提供する。
【解決手段】ロボット本体1は、四足動物の体型を模した共通の筐体f1を有している。被覆体2は、ロボット本体1に着脱自在に被覆し、各四足動物を模した容姿が個別に異なっている。ロボット本体1は、胴体部3と、胴体部3に取り付けられる頭部4と、胴体部3に取り付けられ、少なくとも歩行可能な複数の可動脚5a〜5dと、を備えている。
(もっと読む)
水の気化熱エンジン
【課題】揮発性の液体の温度変化による蒸気圧変化に起因した液体移動により生じる反復運動を利用して、使いやすく、かつ、用途をより拡大できるコップの要らない反復運動体を提供することである。更に、近未来、反復運動体としての玩具に止まらず、動力の取り出せる水の気化熱エンジンを提供することにある。
【解決手段】管状の首部の一端は内部に揮発性の液体を密封した胴部に挿入定着され、該首部の他端はふくれて閉じられた頭部になっており、かつこれらから構成される反復運動体の近傍に液体を入れるサイホン式給水タンクが別置きされ、さらにその液体を頭部に導く特殊導水体を設けたことを特徴とする従来のようなコップが要らない水の気化熱エンジンとした。
(もっと読む)
マスコットキャラクターの全国ご当地根付等の展示ケース
【課題】 本発明が解決しようとする課題は地図をあしらったマスコットキャラクターの全国ご当地根付等の専用展示ケ−スを提供し、購入地の思い出を想起しながら、当該品の造形美を鑑賞し楽しむ事ができるようにする事である。
【手段】(1)透明な素材(プラスチック、ガラス等)を多用する。
(2)ケースの底部には地図(日本全国地図、地方別地図、県別地図、高速道路別地図等)を描く。
(3)ケースの底部の地図上にマスコットキャラクターの全国ご当地根付等を設置する窪みを作る
(もっと読む)
空気圧式造形体
【課題】短い製作時間、低い製作コストで、視認性・表現性に優れ、また平面画像を忠実に再現できる立体的な空気圧式造形体を提供することにある。
【解決手段】膜構造体は、画像が表面に印刷された前面シート9と反転画像が印刷された背面シート10が、各々の裏面同士が向かい合うように設置され、前面シート周縁部13と背面シート周縁部14が後述する側面シート11を介して繋がるように縫合され、袋状に形成されている。また、前面シート9と背面シート10との間には、ブリッジ12が架設され、膨張を拘束し、前面シート9および背面シート10の表面に凹凸を生じさせる。これにより、膨張時の膜構造体はレリーフのように立体化され、印刷された画像の印象を壊すことがない。
(もっと読む)
魚釣りゲーム玩具
【課題】簡単な構造で実際の魚釣りの雰囲気を味わうことができるとともに、電池の消耗などを気にすることなくリアル感のある魚釣りを楽しむことができる魚釣りゲーム玩具を提供すること。
【解決手段】釣竿2で魚体1を釣り上げる魚釣りゲーム玩具において、上記魚体1を凸面状に湾曲形成された板部材で構成するとともに略中央に口を模して円形の開口部3を形成し、上記釣竿2は竿部6の先端に螺旋溝9が形成された軸体7を吊り下げる懸垂部8を配置し、この懸垂部8には上記軸体7を公転させる駆動機構Dを設け、この駆動機構Dを中心からやや外れた位置に貫通孔25が形成されハンドル10の操作で回転する駆動歯車17と、軸体7の回転を阻止する回転阻止部35とで構成し、上記軸体7の上部を上記貫通孔25を貫通させるとともに、軸体7の上端を上記回転阻止部35に連係させた。
(もっと読む)
ペットロボット
【課題】
自律動作可能な愛玩・擬似飼育用ペットロボットを、ペットロボットの元来有する機能を活用しつつ最低限の新たな機能付加によって、遠隔地からの独居老人等擬似飼育者に対する安否確認・およびその結果の通報を簡易に且つ正確に行えるようにする。
【解決手段】
ペットロボット側からペットロボット擬似飼育者に対して何らかの動作要求を行い、前記動作要求に対して擬似飼育者が予め定められている応答動作を正しく行うか否かをペットロボット側で検知して擬似飼育者の安否判定を行い、判定結果を付加内蔵した通信機能によって予め定められている通報先に通報する。
(もっと読む)
スプリンングを活用した造形玩具
【課題】スプリンングを利用し造形を編み出し楽しむ玩具を提供する。
【解決手段】スプリング本体内径(線径φ0、6ミリ〜1、0ミリ)外形(φ13ミリ〜20ミリ)自由長さ(500ミリ〜700ミリ)の範囲で直線密着に巻き取り、メッキ(12色)を施し両端に接続する装飾具等を取り替える機能を有するスプリングを活用しリアル感を演出させる、造形玩具で楽しむ事を特徴とする。
(もっと読む)
可動玩具のジョイント、及び可動玩具
【課題】 可動玩具のポーズを長時間に亘って持続し易く、しかも付け替え易い可動玩具のジョイント、及び可動玩具を課題とする。
【解決手段】 可動玩具1の第1の構造体と第2の構造体との間を可動可能に連結するジョイント20であって、第1及び第2の構造体の各々に着脱可能な第1及び第2パーツ30,40を有し、第2パーツ40が第1パーツ30を回動可能に支持する。第2パーツ40に対する第1パーツ30の回動位置を、任意の回動位置に制止する回動制止機構をさらに設けた。回動制止機構は、第1パーツ30の回動中心線の周方向に設けられた複数の回動制止溝77と、複数の回動制止溝77の一つに噛合して回動位置の制止を行う回動制止爪84を有する第3パーツ50と、を備える。第3パーツ50は、第2パーツ40と連れ回りするように第2パーツ40に支持又は保持される。
(もっと読む)
福祉に関する知育用教材
【課題】 身体障害者、介助等に関する知識を子供に楽しく学ばせることのできる知育用教材を提供すること。
【解決手段】
所定の強度と厚みを有する台紙に、車椅子、補助犬等、障害者の生活に必要な物品や生物の模型を組み立てることのできるパーツを切り抜き可能に設けた知育用教材。台紙から切り抜いたパーツで組み立てられる車椅子の模型に、当該車椅子を押す姿勢又は車椅子に乗った姿勢で人の模型を結合できたり、補助犬の模型に取り付けたリード、ハーネス等を介して人を結合できるようにしておくのが好ましい。
(もっと読む)
釣り頑具
【課題】 釣り針等の鋭利な用具を用いることなく安全に遊ぶことができるとともに釣り上げ時のスリルを味わうことのできる釣り頑具を提供することを課題とする。
【解決手段】 少なくとも上面が平坦面とされかつ該上面が水面上に露出し得る比重の素材により形成され、魚類その他の生物の形態を模した浮体2と、釣竿3の先端に柔軟な糸材4により吊持され前記浮体の上面に水膜8を介して密接し得る偏平下面5cを有する釣り板5を備えた釣り具1とを具備し、水に浮く浮体2の上面に釣り板5の偏平下面を水膜8を介して当接したとき浮体2が吸着保持されて釣り上げられるようにしたことにある。
(もっと読む)
浮遊体及び給電装置
【課題】 自ら羽ばたく浮遊体を得る。
【解決手段】 浮遊体31に主翼動力装置56を設ける。主翼動力装置56により主翼15に取り付けられたひも199を巻き取り、或いは、解き放つことにより、主翼15が羽ばたく。主翼動力装置56は、モータ65と歯車43,46と巻き取り軸196とから構成される。主翼15はトーションバネ583等が接続され、弾力性があり、常に一定の形を保とうとする復元力がある。従って、主翼15は、糸199により引っ張られて羽ばたいた後、モータ65を逆回転させることによって元の形状に戻る。これを繰り返すことにより自ら羽ばたく浮遊体を得ることができる。
(もっと読む)
音響発生装置を備えた玩具
【課題】 玩具本体の外部に現れる機能部品が多い音響発生装置を備えた玩具において、玩具本体の限られた内部スペースを有効に利用して部品を配置し、しかも配線をシンプルなものとする。
【解決手段】 玩具本体1の上方部8の外面に、スピーカ13の放音ガード21を露出状態で配置する。玩具本体1の上方部8内に、放音ガード21の下方にスピーカ13を配置し、スピーカ13の下方に回路基板15を配置する。玩具本体1の胴部7よりも下方に位置する下方部内には、電源17を配置する。電源17と回路基板15の制御回路とを第1の電気的接続手段23により接続する。回路基板15の制御回路とスピーカ13とを第2の電気的接続手段25により接続する。スピーカユニット29を用いてスイッチ部品27を操作する。
(もっと読む)
学習装置及び学習方法並びにロボット装置
【課題】エンターテインメント性を向上させ得る学習装置及び学習方法並びにロボット装置を提案する。
【解決手段】対象とする物体の名前をユーザから取得する前から、当該対象とする物体の複数の異なる所定の特徴を学習するための学習用データを収集して当該物体の各特徴を学習し、対象とする物体の各特徴の学習結果及び予め記憶している既知の物体の各特徴の学習結果に基づいて当該対象とする物体を認識し、ユーザとの対話を通して取得した対象とする物体の名前と、当該対象とする物体の認識結果と、予め記憶している既知の物体の名前、当該既知の物体の各特徴に対する認識結果を関連付けた関連付け情報とに基づいて、対象とする物体が新規であると判断したときには、当該対象とする物体の必要な特徴を学習すると共に、当該対象とする物体についての関連付け情報を新たに記憶するようにした。
(もっと読む)
アドオン装置へのインターフェイスに関する方法及びシステム
子供の玩具として実施化されることが可能である方法及びシステム10が記載される。当該システム10は、システム10によってホストされる相互作用的な環境へアドオン装置20a又はストーリをインターフェイスするように動作可能である。システム10は、システム10へ導入されたアドオン装置から通知225を受信するように動作可能である応答エンジン30を有する。応答エンジンは、アドオン装置20aへのチャレンジ235を生成するように動作可能であり、前記チャレンジは、埋め込まれた透かしを含む。応答エンジン30は、アドオン装置20aからチャレンジ235に応答して送信された対応する応答を受信するように動作可能である。更に、応答エンジン30は、アドオン装置20aが前記対応する応答を生成する際にチャレンジ235から正確に透かしを抽出することが可能であるか否かを決定するために、前記対応する応答を分析するように更に動作可能である。当該システム10は、これにより、システム10へ新しい装置20aを受け入れることが選択的に可能であり、これにより、システム10を用いて使用される偽造品又は複製品を防ぐことが可能である。 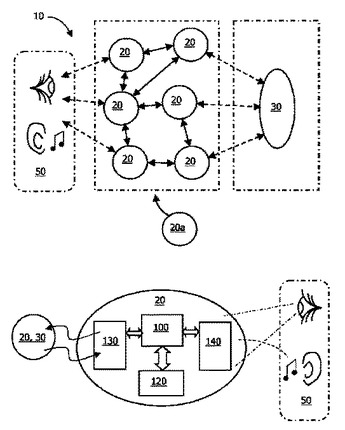 (もっと読む)
(もっと読む)
テレビゲーム玩具
【課題】女の子や、より低年齢の子供にとっても簡単な操作でテレビゲームを楽しむことができるテレビゲーム玩具を提供すること。
【解決手段】ゲームプログラム、画像データ及び音声データを記憶したメモリ5と、該メモリ5に記憶されたゲームプログラムにしたがってゲームの進行をつかさどる制御部6とを備えたゲーム玩具本体1を縫いぐるみ玩具で構成し、該縫いぐるみ玩具はテレビ画面上に登場するキャラクターをイメージして形成するとともに、ゲーム玩具本体1の複数の動作パターンを検出するための検出手段7、8を設け、該検出手段7、8がゲーム玩具本体1の動作パターンを検出すると上記制御部6はゲーム玩具本体1の動きと上記テレビ画面上に表示されるキャラクターaの動きとを連動させるようにした。
(もっと読む)
動作プログラムの入力が簡単なダンス人形
【課題】曲のイメージにあったダンスを簡単にプログラムすることができるダンス人形。
【解決手段】前記課題を解決するため、本発明に係るダンス人形は、以下の要件を備えることを特徴とする。
イ)駆動用モーター1個に対応する1個の入力スイッチを持ち、押すごとに駆動モーターを「A押して正転→B離して停止→C押して逆転→D離して停止」を繰り返す制御回路を持つこと。ロ)上記AからDまでの入力動作サイクルを予め設定された複数回数nを行い、その複数回数nの入力動作サイクルすべてのAからD個々の測定時間を時系列に記憶させる制御回路を持つこと。ハ)上記入力動作が終了後にその記憶させた動作パターンにおいて駆動モーターを繰り返して駆動させる制御回路を持つこと。
(もっと読む)
221 - 240 / 322
[ Back to top ]