
Fターム[2C150DA17]の内容
玩具 (16,863) | 動作形態(飛翔、走行、歩行を含む) (1,579) | 全体が移動する (857) | 空中を飛翔 (148)
Fターム[2C150DA17]に分類される特許
101 - 120 / 148
種付き紙飛行機
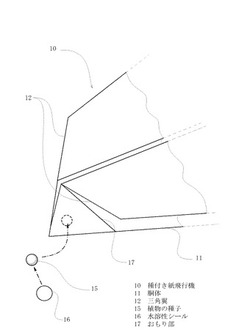
【課題】生分解性シートにて紙飛行機を形成し、この胴体前部に植物の種子を取付けることにより、紙飛行機を飛ばした後に回収不能な場所に着陸して放置されてもゴミにならず、取付けた種子が根付いて花等を咲かせる。
【解決手段】紙飛行機は、胴体11と、三角翼12とを備える。胴体11と三角翼12は生分解性シートにより形成される。この紙飛行機の胴体11の前部に植物の種子15が取付けられる。
(もっと読む)
飛翔玩具

【課題】玩具一部をスプリングの弾性に抗して指で押下げた状態から、指を滑落すことで玩具が飛翔するよう設けた飛翔玩具において、該玩具の主要構成部材としての台板と揺動板とを着脱自在に枢支させ、又それ等台板と揺動板とを構造等を多少異にする複数の台板と揺動板で形成して、それ等を取替え可能に組付けして、水平方向への飛翔距離、ないしジャンプの高さを競うことが可能とした。
【解決手段】台板2と該台板上へ載置させた揺動板11とを着脱自在に枢支させ、該枢支部分後方の台板部分と揺動板部分間へ圧縮スプリング15を介在させて、揺動板11を上後方へ押下げ可能にさせた。
(もっと読む)
ラジオコントロールヘリコプタ操縦練習装置
【課題】機体を損傷することなく、誰でも簡単かつ安全にR/Cヘリの操縦練習を行えるようにする装置の提供。
【解決手段】R/Cヘリ操縦練習装置は、スカート1、ダクト2、練習用ブレード4及び取付けバー11,12でなる。練習用ブレード4は、メインロータのブレードに代えて、操縦練習をする際に装着される。スカート1は、可撓性に富み、ブレード4を回転させ、スカート1内における空気の圧力(内圧)が大気圧より大きくなり、R/Cヘリは、浮き上がり始め、スカート1の下縁が地面70に僅かに接触する程度まで上昇し、その程度の高度を維持する。スカート1は内圧により常に外側に押し出されて膨らんでおり、スカート1の下縁が地面70の何かの突起に触れると、振れた部分だけが凹み、突起に引っかかることがないのは、スカート1の内部の空気によるエアクッション効果による。
(もっと読む)
ロボットシステム
【課題】 軽量簡便なシステムで、静止状態または動作中にかかわらず安定な姿勢が保たれるロボットシステムを提供する。
【解決手段】 複数の体節3と、前記体節同士をつなぐ関節4と、前記関節を駆動する駆動装置5と、前記駆動装置を制御する制御装置8と、前記体節、関節、駆動装置または制御装置のうち少なくとも一つに設けられ、外界より比重の軽い流体が注入された浮嚢2を有し、浮心と重心が異なり、外界に対する比重が1以上であることを特徴とするロボットシステム。
(もっと読む)
プロペラ飛行機玩具
【課題】左右にバランスの取れた旋回性能を持つプロペラ飛行機玩具を提供すること。
【解決手段】発泡プラスチック材で主体が構成されプロペラの回転によって飛行するとともに縦軸を中心にラダーが左右に回動して旋回を行う飛行機本体と、前記プロペラの回転及び前記ラダーの回動を遠隔で制御するためのコントローラとを備えたプロペラ飛行機玩具において、前記ラダーは、前記飛行機本体の左右でプロペラ後流が強く当たる側での最大舵角が他側の最大舵角に比べて小さくなるように構成されている。
(もっと読む)
ヘリコプタ
【課題】ヘリコプタを自動的に安定させるための単純で安価な解決法を提供する。
【解決手段】主回転翼部4は、ロータシャフト8とプロペラ翼12とを備える。補助回転翼部5は、ロータシャフト8に直交する向きに配置されたオシレーティングシャフトと、オシレーティングシャフト30を軸に揺動可能な羽根28を備える。機械的リンク31は、補助回転翼部5の揺動が主回転翼部4のプロペラ翼12の仰角を制御するように主回転翼部4と補助回転翼部5を連結する。尾部回転翼部6は、胴体2の長手方向に伸びたスイングシャフト21の周りに揺動可能なスイング22と、スイング22に支持された第2のロータシャフト17と、第2のロータシャフト17によって駆動される翼と、を備える。
(もっと読む)
浮上移動装置
【課題】羽根部の動作が安定した浮上移動装置を提供する。
【解決手段】浮上移動装置は、前縁部を有する羽根部と、前縁部に前後方向において回転往復運動をさせる上部ロータと、羽根部に前縁部まわりの捻り運動をさせるように、上部ロータの位相から所定値だけずれた位相で往復運動する下部ロータと、上部ロータおよび下部ロータのそれぞれを独立して制御する制御部と、上部ロータの回転角の位相と下部ロータの回転角の位相との差を所定の範囲内の値に制限するリミッター12322a,12322b,および12322cとを備えている。
(もっと読む)
ロボットおもちゃ
【課題】PCなど電子機器が備える、給電と信号送信双方が行えるコネクタを利用して、外部電源を用いることなく、煩雑な制御無しに動作するロボットおもちゃを提供する。
【解決手段】ロボット部に形状記憶合金を用いたアクチュエータを用い、電子機器から給電された電力を、共に送信される制御信号を利用して通電制御を行い、形状記憶合金に流れる電流を制御し、その動作を簡便に制御した。
(もっと読む)
無線操縦飛行玩具
【課題】 機体の浮上を容易にでき走行方向の制御も簡単にできる無線操縦飛行玩具を提供する。
【解決手段】 低部側が平坦な底面を有する矩形板状に形成された機体11と、機体11の低部側の少なくとも4辺形を形成する4隅に設けられ底面側へ送風して機体11を浮上させる第1〜4のプロペラ16a,16b,16c,16dと、第1〜4のプロペラ16a,16b,16c,16dをそれぞれ駆動する第1〜4の駆動手段17a,17b,17c,17dと、第1〜4の駆動手段17a,17b,17c,17dの駆動出力をそれぞれ個別に制御する制御部20と、飛行のための制御信号を外部から制御部20へ送信する送信機30と、第1〜4の駆動手段17a,17b,17c,17d及び制御部20へ電源を供給する電池21とを備える。
(もっと読む)
無線操縦ヘリコプタ玩具
【課題】 磁気力によりローターのブレード面を傾斜させるため、移動制御のための機構を簡単な構造にできるとともに安価に製造することが可能になる無線操縦ヘリコプタ玩具を提供する。
【解決手段】 機体11の上部側へ突出するよう取り付けられメインモータ36により回転駆動されるマストと、マストの上部にローターヘッド33を介してローターブレードのブレード面が傾斜可能に取り付けられたローター13と、機体11側に一端部側が回動可能に取り付けられ、他端部側がアクチュエータ41の駆動によりローターヘッド33側へ近接するようアーム44,44が設けられ、アーム44,44の端部及びローターヘッド33に取り付けられた磁石同士または磁石と強磁性体材料の間に生じる磁気力により、ローター13のブレード面を傾斜させるブレード傾斜機構16と、機体11に搭載されメインモータ36及びアクチュエータ41の動作を制御する受信機20とを備える。
(もっと読む)
無線操縦飛行機
【課題】駆動部の容量を小さくすることができ、無線操縦飛行機を小型化することができるようにする。
【解決手段】飛行体11と、飛行体11と通信部を介して接続された飛行体11を飛行させる地上コントローラ12とを有する。飛行体11は、胴部14、胴部14に配設された駆動部、駆動部を駆動することによって推進力を発生させる推進装置、相対的に移動自在に配設された複数の翼体38、39から成る主翼25、各翼体38、39の相対的な位置を変更して、主翼25の実質的な面積を変更するための開閉機構43、及び被搬送物を選択的に保持し、落下させるための落下装置64を備える。主翼25の実質的な面積を変更することによって、飛行速度を変更することができるので、推進装置を回転させるための駆動部の容量を小さくすることができる。
(もっと読む)
ラジコンヘリコプター用補助スキッド
【課題】 ラジコンヘリの操縦性を損なわずに、安全かつ確実にラジコンヘリ機体の左右方向への倒れを防止でき、また同時に簡単な構造で、軽量かつ組み立てが容易な補助スキッド構造を提供する。
【解決手段】 機体と略平行な幅方向に配置した二本のスキッドパイプと、前記2本のスキッドパイプを湾曲した両先端側で橋渡し状に保持する一対の脚部とで、井桁状に組み合わせ、前記一対の脚部の一方の側に、同一方向に二本揃えて、前記脚部とは直交する方向に第二の脚部を配置し、前記第二の脚部の両先端で保持される一本の補助パイプが、前記二本のスキッドパイプと直交するように、その幅方向両外方に延在し、かつ左右対称に突出した形状で固定配置する。
(もっと読む)
スローイングディスク
【構成】 スローイングディスク(2)は、楕円形の連続した軟質フレーム(4)を含み、その軟質フレームは、飛行中に形状を変える。軟質フレームは、それの厚みを貫通する中央開口(6)を規定する。軟質フレームは、飛行中に変化する高さを持ったかつフレームの下側面に3次元空洞を規定するアーチ形状を有し、飛行中に、スローイングディスクに対して揚力を与える。
【効果】 持ちやすく投げやすい、新規なスローイングディスクが得られる。
(もっと読む)
音響を発生する飛行遊具
【課題】本発明は音を発生する飛行遊具を提供することを目的とする。
【解決手段】飛行遊具に音源メモリ、制御機構、変換器、スピーカ、電池から構成する音響発生手段を搭載する。
(もっと読む)
遠隔制御デバイスに対する紛失または損傷を低減する方法および装置
第1送受信機(9)と、第2ワイヤレス送受信機(20)および第2プロセッサ(24)を有する遠隔制御式装置(18)を制御する第1プロセッサ(16)とを有する遠隔制御デバイス(12)。プロセッサは、ワイヤレス送受信機(複数可)によって送信される信号の信号品質レベルを測定して、信号品質レベルが、所定の閾値未満に下がる場合、遠隔制御式装置の向きを変えるようにプログラムされることができる。プロセッサ(複数可)は、遠隔制御デバイスの方に遠隔制御式装置の向きを変える(56)か、遠隔制御式装置を安全に停止させるか、または、信号品質レベルが所定の閾値を越えて留まる限り、遠隔制御式装置がミアンダリングするようにさせる制御信号を送信するようにさらにプログラムされることができる。 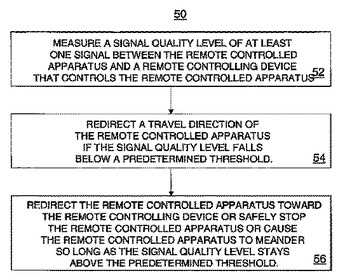 (もっと読む)
(もっと読む)
浮遊体及び給電装置
【課題】 自ら羽ばたく浮遊体を得る。
【解決手段】 浮遊体31に主翼動力装置56を設ける。主翼動力装置56により主翼15に取り付けられたひも199を巻き取り、或いは、解き放つことにより、主翼15が羽ばたく。主翼動力装置56は、モータ65と歯車43,46と巻き取り軸196とから構成される。主翼15はトーションバネ583等が接続され、弾力性があり、常に一定の形を保とうとする復元力がある。従って、主翼15は、糸199により引っ張られて羽ばたいた後、モータ65を逆回転させることによって元の形状に戻る。これを繰り返すことにより自ら羽ばたく浮遊体を得ることができる。
(もっと読む)
リング状遊技具
【課題】 使用場所の制約がなく、種々の態様で手軽に利用でき、子供が楽しく遊んだり、老人や肢体の不自由な人が軽い運動や機能回復運動を興趣をもって無理なく行え、製作も容易に行えるようにすると共に、材料を無駄なく利用でき、取扱や包装を容易にする。
【解決手段】 リング状遊技具1は、弾力性および柔軟性を有する材料で製作され、中央に円形状のリング穴2bを設けた平板状の環状ディスク2の外周部に、環状ディスク2の半径方向に突き出した突出部3が、環状ディスク2の周方向に間隔をあけて複数設けられると共に、突出部3の外周面が環状ディスク2の周方向に向く同一の円周に沿う円弧状面に形成された大径のリング状遊技具Aを備え、リング穴2bに、弾力性および柔軟性を有する材料で製作され、外周がリング穴2bに接する小径のリング状遊技具Bが着脱可能に嵌着された構成とされている。
(もっと読む)
浮揚体
【課題】構造が簡単で、小型化に有利な浮揚体を提供すること。
【解決手段】本発明の浮揚体1Aは、基部2と、基部2に対し回転可能に設置され、回転翼34を備えたロータ3と、ロータ3を回転駆動する振動体4とを有している。振動体4は、電極と圧電素子と補強板とを積層してなるものであり、ロータ3に設けられた被駆動体33の外周面331に当接するように設置されている。振動体4は、圧電素子に交流電圧が印加されると、圧電素子の伸縮により、長手方向に微小な振幅で振動(縦振動)する。振動体4が振動すると、被駆動体33は、振動体4から摩擦力(押圧力)を繰り返し受け、回転する。これに伴なって、ロータ3も回転する。ロータ3が回転すると、回転翼34に揚力が作用し、これにより、浮揚体1Aは、空中に浮揚する。
(もっと読む)
パラシュート射出装置および無人飛行機
【課題】 無人飛行機の飛行中に、どんな姿勢でパラシュートを射出しても確実にパラシュートを開傘するとともに、開傘後に機体の姿勢を安定に保ったまま確実に着地させるパラシュート射出装置を得る。
【解決手段】 パラシュート9を収納する収納部3と、収納部3を覆う蓋5と、パラシュート9の収納時に蓋5を係止する留め金4と、蓋5の係止解除に応じて収納部3を展開動作させ、これよってパラシュート9を射出するバネ2と、バネ2に連結され、パラシュート9の射出後にバネ2とともにパラシュート9を支持する紐8とを備えることにより、主翼上方のより高い位置でパラシュートを支持することができる。
(もっと読む)
無人ヘリコプタの重量物配置構造
【課題】 空気抵抗を小さくして出力損失を軽減し、安定した飛行制御が可能な無人ヘリコプタの重量物配置構造を提供する。
【解決手段】 地上からのリモコン操作によるマニュアル飛行制御及び機体に搭載した自律制御装置による自律飛行制御が可能な無人ヘリコプタ1において、機体4の左右外側のうち一方のみに、重量物を搭載した。前記重量物は、例えば前記自律制御装置を収納した自律制御ボックス15である。
(もっと読む)
101 - 120 / 148
[ Back to top ]