
Fターム[2C150EG03]の内容
玩具 (16,863) | 推進(主に空中、水上、水中での推進) (181) | 推進手段に関するもの (161) | ねじの原理を利用 (77) | プロペラ(ヘリのローター含む) (71)
Fターム[2C150EG03]に分類される特許
1 - 20 / 71
フライングディスク
【課題】飛翔体として遊戯者が投げ合うことのできるフライングディスクであって、熟達者でなくても有る程度の飛距離を出すことができ、水平移動のスピードが落ちた場合にゆっくりと下降してキャッチがしやすいフライングディスクを提供すること。
【解決手段】中央に開口を設けた上壁部および当該上壁部の外周囲に下方に向かう湾曲面若しくは傾斜面を形成した円盤本体と、前記開口の中央部に配置されたプロペラおよび当該プロペラを回転させる駆動装置と、前記プロペラの回転によって生じる下降気流を受けて円盤本体に回転力を付与するように、前記プロペラとは異なる角度で取り付けられた翼状部材を設けたことを特徴とするフライングディスク。
(もっと読む)
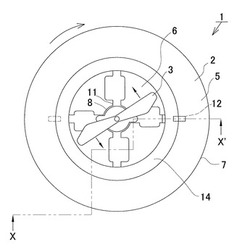
遠隔操縦式ヘリコプタの操縦練習装置

【課題】R/Cヘリの操縦練習装置において、初心者から熟練者まで機体を損傷させることなく安全にホバリングの練習を行え、R/Cヘリの操縦技術を適正に習得することができるようにする。
【解決手段】基台3の上面に形成された開口部4aに、一端に球面軸受け8を介して機体スタンド7が連結され、他端にストッパ15が取付けられたマスト6を通し、開口部4a内でマスト6を上下移動及び傾倒自在に支持して構成される遠隔操縦式ヘリコプタの操縦練習装置2において、マスト6を傾倒自在なスライドガイドパイプ10に通して支持し、開口部4aの下側に、内部にスポンジからなる緩衝部材13が装填された、マスト6の傾倒範囲を制限するスカート状の筒体からなる傾倒規制体9を取付ける。
(もっと読む)
打ち上げ回転体
【課題】火薬のような危険物を使用せず、人体に対しても安全で危険が無く、野外の比較的狭い場所でも遊べて、投げ方或いは打ち上げ方によって飛行状態に差が無く何度でも使用でき、夜間でも皆で楽しめるようなおもちゃを提供する。
【解決手段】打ち上げ回転体1おいては、打ち上げ回転体1の上昇時と下降時の姿勢変化により展開する回転翼4を設け、ゆっくり下降させることにより安全に遊ぶことができ、あわせて電池5と発光素子6を搭載して夜間においても花火に変わるような打ち上げおもちゃとして楽しめる。
(もっと読む)
浮遊物撹拌式展示装置
【課題】展示物の前面に独立した展示装置を密着設置して内部の浮遊物を持続的に撹拌、循環させ展示物と一体的な情景の演出効果を得ようとするものは従来見当たらない。展示物と浮遊物を分離した容器にそれぞれ収納しながら、浮遊物のみを独立して持続的に撹拌浮遊させあたかも展示物に降りかかったり、その周囲や表面に舞い散ったりするように見える演出効果が求められる。
【解決手段】厚みを極力薄くした矩形の前面と背面を透明にした直方体容器内に封入した浮遊物を撹拌装置で撹拌、循環させ背後に密接して設ける展示物もしくはその収納容器と一体的に見える展効果を実現する。浮遊物は水等の液体もしくは空気等気体中で浮遊させ、これ等の撹拌はそれぞれ液体中に浸漬して設ける水中モーター等駆動装置により駆動されるプロペラ等撹拌翼の回転もしくは、気体中で通常のモーター等駆動装置でファン等撹拌翼の回転で得る。
(もっと読む)
同軸反転二重回転プロペラを有する、リモートコントロール模型ヘリコプターのリンケージ装置
同軸反転二重回転プロペラを有する、リモートコントロール模型ヘリコプターのリンケージ装置が提供される。上記リンケージ装置は、サーボステアリングエンジン動作システム、テールモーター動作システム、及び受信機制御装置(4)を備えている。上記サーボステアリングエンジン動作システムは、前後動サーボステアリングエンジン動作ユニット、及び左右動サーボステアリングエンジン動作ユニットを備えている。上記受信機制御装置(4)は、上記サーボステアリングエンジン動作システム及び上記テールモーター動作システムに同時接続され、上記前後動サーボステアリングエンジン動作ユニット及び上記テールモーター動作システムが同時に協働して作動するように制御可能になっている。従来の3チャンネルまたは4チャンネル模型ヘリコプターと比較して、本発明を適用した、同軸反転二重回転プロペラを有する、リモートコントロール模型ヘリコプターは、風抵抗の性能が優れており、屋外の風に対し速く飛行可能という要件を満たす。 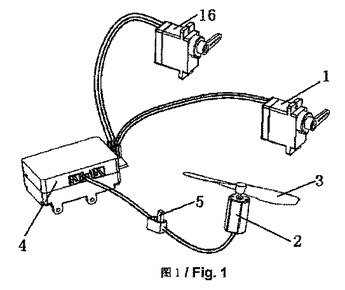 (もっと読む)
(もっと読む)
モータ装着ケース
【課題】
ペットボトル等の容器の口部にモータを組み込み、当該モータを利用して容器を飛行玩具又は走行玩具にすることができるモータ装着ケースを提供する。
【解決手段】
モータ装着ケース1は、容器31の口部32内に取り付けられる。ケース本体2は、底壁3と、底壁3の周縁に形成された保持枠5と、保持枠5の上端に形成された係止縁6とからなる。係止縁6の内側には、モータ21をケース本体2内に挿入する開口7が形成されている。保持枠5は、ケース本体2内のモータ21を保持するように構成されている。係止縁6は、容器31の口部32の上端33に係止され、且つ口部32に螺着されるキャップ35と口部32の上端33によって挟持される形状に形成されている。
(もっと読む)
飛行機玩具
【課題】
【解決手段】
飛行機玩具において、プロペラ30、胴体50、着陸装置70を備えて、前記プロペラ30は、第1プロペラ310と第2プロペラ320を含み、前記第1プロペラ310は、前記胴体50の頂部に装着されて、前記第2プロペラ320は、前記胴体50と下部の着陸装置70との間で装着される。
(もっと読む)
無人回転翼機のモーター用の支持ブロック
無人機の各エンジンの支持ブロック130は、支持部131であって、当該支持部131に、無人機の推進ユニット100を駆動する電気モーター120と、当該モーターに連結されることを意図されている、推進ユニットの少なくとも1つの構成部材111が固定される、支持部131と、無人機を地上に支持するフット132と、支持部と支持スタンドとの間に延在する連結要素133とを備える。支持スタンドと連結要素はともに、電気モーターが支持部に固定されるように位置決めされる際に当該電気モーターのための隙間空間134を有する。 (もっと読む)
プロペラとその形成方法とその機能、形態
【課題】プロペラの形成加工や強度、小型化、折りたたみなどに、利便性と機能性の高いプロペラを提供する。
【解決手段】最小1枚のプロペラの翼となる、薄い、可撓性と弾性を備えた材料か、剛性があっても、プロペラを形成するための翼に、ヒンジなどの手段で折れ曲がるような構造の翼部材と、最小2枚のプロペラハブを備え、プロペラハブの距離と回転角位相と、プロペラハブに取り付ける翼を、その両翼端で回転するようにして、やはり回転角位相とを変化できるように構成した。
(もっと読む)
ラジオコントロール送信機、ラジオコントロール送信機における通信方法
【課題】模型用のラジオコントロールシステムのトレーナ機能の利用にあたり、トレーナ信号受信機やトレーナケーブルを使用することなく、先生用と生徒用のラジオコントロール送信機との間での無線通信によってトレーナ信号が送受信できるようにする。
【解決手段】操縦信号の送信に2.4GHz帯での周波数ホッピング方式を採用する。そのうえで、トレーナモード時には、先生用ラジオコントロール送信機は、周波数が切り換えられるフレーム期間ごとに、操縦信号の送信とトレーナ信号の受信を実行する。生徒用ラジオコントロール送信機も、周波数が切り換えられるフレーム期間ごとに、トレーナ信号の送信を実行する。
(もっと読む)
ラジオコントロール送信機、ラジオコントロール送信機における操縦信号の送信方法
【課題】模型用のラジオコントロールシステムのトレーナ機能の利用にあたり、先生用ラジオコントロール送信機と生徒用ラジオコントロール送信機とでのチャンネルオーダーの相違による不具合をユーザの負担にならないようにして解消する。
【解決手段】先生用ラジオコントロール送信機のチャンネルに、同じコントロール対象が割り当てられている生徒用ラジオコントロール送信機1Bのチャンネルを対応付ける操作を行ってチャンネル対応データを作成し、これを先生用ラジオコントロール送信機に保持させる。先生用ラジオコントロール送信機は受信したトレーナ信号のチャンネルを、チャンネル対応データに従って変換して操縦信号を生成、送信する。
(もっと読む)
電動模型飛行機のプロペラ接続具
プロペラを備える電動模型飛行機における電動出力軸とプロペラとを接続するためのプロペラ接続具であって、2つの接続具を含み、一方の接続具が模型飛行機の電動出力軸と接続し、他方の接続具が模型飛行機のプロペラと接続し、上記両接続具のうちの一方の接続具が開口溝を備える弾性体であり、上記両接続具が同一軸上に互いに接続されて共に回動するが、外力の衝撃を受けると好適に分離し、プロペラを有効に保護することを特徴とする。 (もっと読む)
プロペラ玩具
【課題】 走行及び飛行を可能とし、走行速度を調整することができるとともに、着地時或いは走行終了時に直ちに停止することのできるプロペラ玩具を提供する。
【解決手段】 本発明のプロペラ玩具1は、機体10と、前輪11と、機体10の後部に枢着された連結部材5を介して取付けられた後輪12と、機体10上方へ突出するように取付けられロータ用駆動モータにより回転駆動されるロータシャフト30,40と、該ロータシャフト30,40に取付けられたロータ3,4と、機体10の底面から下方に突出した制動部材と、を備え、制動部材を走行面に接地させて、機体10が僅かに前傾とされた略水平姿勢とされた停止状態にあるときに、ロータ用駆動モータによりロータシャフト30,40を駆動させて、車輪を走行面に接地させた状態で機体10の後部を浮上させた前傾姿勢とさせて走行を開始し、ロータシャフト30,40を更に高速で駆動させることで離陸させて飛行するように構成されている。
(もっと読む)
模型回転翼航空機の回転翼、及びその回転翼の製造方法
【課題】模型回転翼航空機に適用可能であり、実機により近いリアル性を有する回転翼、及びその回転翼の製造方法を提供する。
【解決手段】円筒状で所望の長さのアルミ合金管10を、ロール成形により、断面が翼断面形になるように成形する。これにより、模型回転翼航空機用の回転翼5aを中空構造に構成することができる。このため、回転翼5aは、重量が大幅に低減されたものとなる。そのような回転翼5aによれば、アルミ合金特有(金属特有)の重量感や重厚感をかもし出しつつ、金属素材につきまとう重量の問題も回避できる。しかも、回転翼5aは、アルミ合金管10を成形することで一層構造(一体構造)となり、強度も充分なものとなる。
(もっと読む)
厚紙トンボ回転軸
【課題】従来の竹トンボは教材としても取り入れられた経緯もあったが、加工の際の道具類は、鋸と錐と小刀が必要とされた、厚紙羽根トンボの軸の加工は軸の先端に設ける羽根受け台座と突起は凸形であるのでカッターナイフ一本で加工できる。
【解決手段】軸の羽根受け台座が凸形であるから、厚紙羽根の加工を容易にする。
(もっと読む)
無人機を操縦する装置
本発明は、無人機8を操縦する装置10であって、筐体傾き検出器12と、複数のタッチセンシティブエリア30、32、34、36、38、40、42を表示するタッチ画面16とが備わった筐体を備える、装置10に関する。無人機には、ユーザーからのコマンドを何も受信していない場合に静止飛行のために自律式安定化システムが備わっている。装置は、(i)無人機の自律式安定化システムを作動させるモードであって、無人機に送信された操縦コマンドはタッチセンシティブエリアによって発せられた信号の変換によって生じるモードと、(ii)無人機の自律式安定化システムを作動停止させるモードであって、無人機に送信された操縦コマンドはハウジングの傾き検出器によって発せられた信号の変換によって生じるモードと、の間で無人機の操縦モードを交互に切り換える作動/作動停止ボタンを形成する、触知性エリア30によって操作される手段を備える。 (もっと読む)
重心調整装置
【課題】回転翼の回転軸の軸線方向に沿った飛行に加え、簡易な構造で、回転翼の回転軸の軸線方向に交差する方向への飛行を実現できる、操縦の容易な飛行玩具を実現するための重心調整装置を提供する。
【解決手段】回転軸を中心に回転する回転翼を有する飛行玩具の重心の位置を調整する重心調整装置であって、第1の錘と、前記回転軸の軸線と交差する方向に延在する第1の錘支持部材と、第1の錘を保持し、前記第1の支持部材の所定位置に係止可能な第1の錘位置決め手段と、を備え、前記第1の錘支持部材の延在する方向に沿って前記飛行玩具の重心の位置を調整することにより、前記第1の錘支持部材の延在する方向へ前記飛行玩具を飛行可能にする。
(もっと読む)
超小型飛行体
【課題】翼弦長を基準長とするレイノルズ数が10の5乗以下の領域を固定薄板翼により飛行する超小型飛行体の低抵抗飛行特性および大迎角飛行特性並びに操縦特性を向上する。
【解決手段】翼弦長を基準長とするレイノルズ数が10の5乗以下の領域を固定薄板翼により飛行する超小型飛行体において、当該固定薄板翼の前縁に近接して当該固定薄板翼の前縁の前下方45度から後上方45度までの範囲の位置に概ね滑らかな表面を有する円形断面の回転ロッドを当該固定薄板翼の前縁と当該回転ロッドの回転軸とが略平行となる位置関係において備え、当該回転ロッドを当該回転ロッドの周速度が一様流速度の2倍以上の速度となるよう当該固定薄板翼の翼循環方向と同一の回転方向に回転させることにより低抵抗飛行および大迎角飛行を実現する。また当該境界層制御手段を従来知られるスポイラー操縦装置と同様の効果を奏する要領において境界層制御操縦に利用する。
(もっと読む)
ヘリコプタ玩具
【課題】機体を安定して上昇させることができ、上昇後に機体を操作することが容易な構成であり、また、構成がシンプルであるために製造コストが安いヘリコプタ玩具を提供する。
【解決手段】本体の両側に延在する少なくとも一組の主翼の端部に配置される少なくとも一組のメインロータと、前記本体の後方に延在する尾部に配置されるテールロータと、本体内部に設けられて各メインロータの回転速度とテールロータの回転速度とをそれぞれ独立して個別に調節するコントローラとを備え、前記メインロータの中心軸が両主翼に対して両ロータがそれぞれ本体から離隔する方向に傾斜するように配置されることを特徴とする。
(もっと読む)
飛翔ロボット
【課題】 操縦機からの指示に応じて、飛翔ロボットを随意に自動的に空中静止させたり方位維持することができなかった。
【解決手段】
飛翔ロボットの機体の上部と下部とを自在継ぎ手により連結し、該自在継ぎ手を中心として該機体の上部と下部との間の相対傾き角を変える機構をサーボモータで駆動し、機体の傾斜角および/または傾斜角速度を傾斜センサで検出して飛翔ロボットの位置を制御する。また、回転翼の回転軸との傾斜角を変化させる補助翼を、方位センサで検出した方位角速度および/または方位角に基づいて動かし、飛翔ロボットの方位を制御する。
(もっと読む)
1 - 20 / 71
[ Back to top ]