
Fターム[2D003AB01]の内容
Fターム[2D003AB01]に分類される特許
1 - 20 / 360
油圧制御装置、及びそれを備える建設機械
油圧駆動装置
操作パターン切換装置
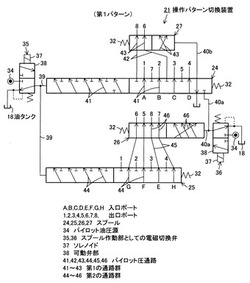
【課題】パイロット方式の操作パターン切換装置でありながら、コンパクトに構成できるとともに操作パターンの切換を電気的に簡単に行なうことができる操作パターン切換装置を提供する。
【解決手段】1つの装置本体に軸方向作動型のスプール24〜27をそれぞれ設ける。これらのスプール24〜27を2つの電磁切換弁35,36への電気入力信号のオン・オフにより作動し、軸方向のオン位置およびオフ位置に変位させる。これらの電磁切換弁35,36のオン・オフの組合わせによりスプール24〜27を経て連通する複数のパイロット圧通路41〜46を変化させることで、複数の入口ポートA〜Hと複数の出口ポート1〜8との接続関係を4通りに変化させる。
(もっと読む)
作業機

【課題】搭載表示装置を簡素化しつつ、必要とされる稼働時間は外部端末にて容易に取得することができるようにする。
【解決手段】作業機1の制御を行う制御装置30からの情報に基づき表示を行う搭載表示装置15を備えた作業機において、制御装置30は、稼働時間を計測する計測部42と、この計測部42で計測した稼働時間を数字で表す数字情報を搭載表示装置15ではなく外部端末40に無線通信によって送信する情報送信部43とを備えている。
(もっと読む)
旋回式作業機械の被害量表示装置
【課題】港湾荷役などの水切り作業を専ら行う場合でも下部走行体の特定箇所の部材が早期に疲労破壊するのを抑制し、下部走行体の疲労寿命を大幅に伸ばし得る旋回式作業機械の被害量表示装置を提供する。
【解決手段】旋回式作業機械は、下部走行体上に上部旋回体が旋回中心回りに360度旋回可能に搭載され、この上部旋回体にアタッチメントが設けられてなる。この旋回式作業機械の被害量表示装置は、上記アタッチメントによる作業時に下部走行体に掛かる負荷を、下部走行体の旋回中心回りの所定の旋回範囲毎に計測する計測手段41と、この計測手段により計測した所定の旋回範囲毎の負荷を基にそれぞれ下部走行体に掛かる所定の旋回範囲毎の被害量を算出する演算手段42と、この演算手段で算出した所定の旋回範囲毎の被害量を表示する表示手段43とを備える。
(もっと読む)
作業車両
【課題】 ステアリングバルブ装置を床板に対して防振支持する機種と防振支持しない機種とで、可能な限り部品の共通化を図ることができるようにする。
【解決手段】 ステアリングコラム13には、床板8のコラム座板取付孔8Aを上側から覆うコラム座板14を設ける。コラム座板14に設けるシャフト支持体24を、下部シャフト17の外周側を取囲み下部シャフト17をベアリング25を介して回転可能に支持する筒部材26と、筒部材26の上端側に設けられ下部シャフト17と筒部材26との間をシールする保護カバー27と、筒部材26の下端側に固定して設けられ下面側にステアリングバルブ30が取付けられるバルブ取付板28とにより構成する。このようなシャフト支持体24を、防振支持する機種と防振支持しない機種とで、共通部品として用いることができる。
(もっと読む)
ハイブリッド式作業車両
【課題】走行系の異常時にステアリング操作が可能な時間を十分に確保できるハイブリッド式作業車両を提供する。
【解決手段】ハイブリッド式作業車両は、キャパシタ30から出力された直流電力を交流電力に変換する非常用インバータ23と、非常用インバータ23で変換された交流電力により駆動する非常用電動機13と、非常用電動機13により駆動される非常用ポンプ3と、メインポンプ2または非常用ポンプ3からの圧油により駆動されるステアリング装置7と、走行系の異常が検出されたとき、キャパシタ30から非常用インバータ23に供給される直流電力を非常用インバータ23によって交流電力に変換し、非常用電動機13により非常用ポンプ3を駆動する主制御部50および非常用制御部51とを備えることを特徴とする。
(もっと読む)
ホイールローダ
【課題】車輪を電動機で駆動するホイールローダにおいて、後輪がスリップした場合において大きい駆動力を得ることができるようにする。
【解決手段】前輪WFA、WFBは、前輪側アクスル22Fを介して後輪側プロペラシャフト25R2に連結され、後輪WRA、WRBは、後輪側アクスル22Rを介して後輪側プロペラシャフト25R2に連結されている。前輪側プロペラシャフト25Fには前輪用電動機MFが取り付けられ、後輪側プロペラシャフト25R2には後輪用電動機MRおよびクラッチCLが設けられている。掘削作業中であって、前輪WFA、WFBと後輪WRA、WRBの回転数差が所定の回転数差を超えた場合には、クラッチCLがオン駆動され、前輪側プロペラシャフト25Fと後輪側プロペラシャフト25R2とが連結される。
(もっと読む)
作業機
【課題】 作業機が特定の状態にあるときに、油圧ポンプの吸収トルクの最大値を高めの値に設定変更するようにした作業機において、操作レバーをレバーストロークの中間位置で操作しているときに、最大吸収トルク設定値が切り換わることにより機体に揺れが生じ、機体に対して操作レバーが相対的に動いて操作性に悪影響を及ぼすと共に機体が暴れるという課題を解決する。
【解決手段】 最大吸収トルク設定値が燃費のよい最大吸収トルク設定値であるE2ポジションのときに、走行操作部材21a,21bとブーム操作部材21eとの一方又は両方のフル操作が検出されると、前記E2ポジションよりも最大吸収トルク設定値の大きいE1ポジションに自動的に切り換えるよう制御する。
(もっと読む)
作業車両
【課題】
エンジンおよび蓄電装置から供給されるパワーを、油圧ポンプおよび走行電動機で消費するハイブリッド作業車両において、油圧ポンプと走行電動機とへのパワー配分に起因する乗り心地悪化を防止できる作業車両を提供すること。
【解決手段】
油圧要求パワーと走行要求パワーの合計値が、エンジンが出力可能なエンジンパワーと蓄電装置が放電可能な放電パワーの合計よりも大きいとき、油圧ポンプの実際のパワーを要求時の値から油圧要求パワーに向かって所定の制限をかけながら増加させるとともに、油圧ポンプのパワーに当該所定の制限をかける間、当該所定の制限の大きさ以下の値だけ走行電動機の実際のパワーを要求時の値から減少させる。
(もっと読む)
2速油圧モータの手動変速切換弁
【課題】自動変速切換弁に使用する同一のハウジングの構造を変更することなく使用し、かつ該ハウジングに嵌挿する大径スプールの構造を変えて手動変速切換できるようにする。
【解決手段】手動変速切換弁20は、ハウジング21内に両端がプラグ22、23により閉じられた大径スプール穴24に軸方向に移動可能に嵌合され一側端面に設けられた中空穴25を有する2速スプール26と、2速スプール26の中空穴25の肩部27とプラグ22の端面にとの間を離隔する方向に付勢するばね部材28と、を有する。
(もっと読む)
作業機械
【課題】作業機械の走行時かつキャブが上昇位置の時のキャブの振動を抑制する。
【解決手段】作業機械1は、作業機械本体10と、作業機械本体10に変位可能に搭載されたキャブ15と、作業機械本体10とキャブ15とを連結して最下位置および上昇位置にキャブ15を変位させるキャブ昇降装置20と、作業機械本体10に対するキャブ15の位置を検出する位置検出器80と、作業機械本体10に設けられて作業機械本体10を走行させる走行モータ25とを備える。また、作業機械1は、キャブ15が上昇位置であることを位置検出器80が検出した時に(ステップS1)、走行モータ25の回転速度の最大値を制限するコントローラ90(速度制限手段)を備える。
(もっと読む)
作業車両のアキュムレータの異常検出方法および装置
【課題】オペレータにより作業車両の走行が開始されるタイミングに合わせて、アキュムレータ内の圧油不足を報知することができるようにすること。
【解決手段】パーキングブレーキスイッチ33による指令内容を判定する第1判定手段51と、作業車両の走行時にアキュムレータ20に蓄えられてあるべき圧油の圧力の基準値よりもアキュムレータ20内の圧力が低いか否かの判定を、第1判定手段51による判定が終了したタイミングで行う第2判定手段52と、パーキングブレーキスイッチ33による指令内容がパーキングブレーキ装置30の解除であると第1判定手段51によって判定された場合に、第2判定手段52によりアキュムレータ20内の圧力が基準値よりも低いと判定されたことを、第2判定手段52による判定が終了したタイミングで表示器55およびスピーカ56を制御して報知する報知制御手段53とを備える。
(もっと読む)
クローラ式車両
【課題】路面状況等に拘らず、作業者が意図する方向に向けて走行させることが可能な高所作業車を提供する。
【解決手段】高所作業車は、クローラ装置の走行作動を操作するための操作レバー51と、操作レバーの傾倒方向および傾倒量を検出するX軸検出器およびY軸検出器と、クローラ装置の走行作動を制御するコントロールユニットとを備え、操作レバーの中立位置から前方への傾倒操作領域が、低速前進領域F1および高速前進領域F2からなり、コントロールユニットは、操作レバーが高速前進領域F2にある状態から右方に傾倒操作されたときには、左クローラ装置を操作レバーの前後への傾倒量に対応した回転速度で正転させ、右クローラ装置を、左クローラ装置の回転速度よりも所定出力だけ低く設定された回転速度を操作レバーの右方への傾倒量に対応させて低下させて設定された低下回転速度で、左クローラ装置と同一方向に回転させる。
(もっと読む)
作業機
【課題】様々な使用形態に応じて自由に使用することができると共に使用の制限もできるようにする。
【解決手段】トラクタ、バックホー、コンバイン、移植機などの作業機は、当該作業機を使用することができる残り時間を算出する残り時間算出手段40を備えている。また、この作業機は、残り時間が無くなると駆動部の動作を制限する動作制限手段41と、残り時間の延長を許可する許可信号Sが入力されると残り時間を延長する残り時間延長手段42とを備えている。
(もっと読む)
無人走行車両の走行禁止領域設定システム及び無人走行車両の走行禁止領域設定用コンピュータプログラム
【課題】電源から機器へ電力を供給するケーブルを車両が踏まないようにするために、車両の走行を禁止する領域を設定するにあたって、車両が走行可能な領域を大きくすること。
【解決手段】管理装置10は、例えば、鉱山の採掘場を走行する車両の走行を禁止する走行禁止領域を設定する。管理装置10は、ケーブル位置推定部12Aと、禁止領域設定部12Bとを含む。ケーブル位置推定部12Aは、電源からケーブルを介して電力の供給を受ける電気式作業機械と前記ケーブルを支持する支持体との間における少なくとも二箇所の位置情報と、前記電気式作業機械と前記支持体との間のケーブルの長さと、前記電気式作業機械の位置に関する情報とに少なくとも基づいて、前記ケーブルの位置を推定する。禁止領域設定部12Bは、前記ケーブル位置推定部12Aが推定した前記ケーブルの位置に基づいて、車両の走行を禁止する走行禁止領域として設定する。
(もっと読む)
バケットを有する作業車両の走行制御装置
【課題】ホイールローダによる掘削作業用アクチュエータと走行駆動アクチュエータへの動力配分をバケット重量に応じて自動化する。
【解決手段】可変容量形油圧ポンプ2と可変容量形油圧モータ3とを閉回路接続して形成され、油圧モータ3の押しのけ容積を制御するモータ制御手段11を有する走行用回路HC1と、作業用油圧ポンプ4からの圧油により作業用油圧アクチュエータ114,115を駆動する作業用回路HC2と、作業用回路HC2の負荷圧Ppに応じて油圧モータ3の押しのけ容積の最大値を制限する最大値制限手段10とを備える。最大値制限手段10は、バケット重量と作業回路の負荷圧に応じて油圧モータ3の傾転角の最大値を制限する。
(もっと読む)
自走式作業機械の制御装置
【課題】 自走式作業機械の走行体と旋回体を停止した後その停止状態を解除しても不都合を生じさせない制御装置を提供する。
【解決手段】 給電ケーブルの張力が第1閾値を超えた時に下部走行体の走行方向が検出されていないときは、走行が禁止される(STEP4、5)。給電ケーブルの張力が第1閾値を超えたときに下部走行体の走行方向が検出されている場合には、走行方向への走行が停止かつ禁止され、下部走行体の反対方向の走行が許容される(STEP6〜8、STEP12〜14)。上部旋回体についても下部走行体と同様に、上部旋回体の旋回方向が検出されていないときは旋回が禁止され(STEP16、17)、上部旋回体の旋回方向が検出されている場合には、旋回方向への旋回が停止かつ禁止され、上部旋回体の反対方向の旋回が許容される(STEP18〜20)。
(もっと読む)
建設機械の走行操作装置
【課題】回路構成がシンプルな建設機械の走行操作装置を提供する。
【解決手段】油圧モータ21L,21Rと、走行用切換弁20L,20Rと、単一の操作レバー70と、スピンターン用操作手段と、第1〜第4プッシュロッド51r〜54r、ならびに、各プッシュロッド51r〜54rが押圧されたときに第1〜第4パイロット管路1P〜4Pを介して走行用切換弁20R,20Lにパイロット圧を出力する第1〜第4減圧弁51〜54を有するパイロット弁50と、スピンターンを許可する操作がなされたときに第3、第4パイロット管路3P,4Pの接続を切り換えることにより、第3減圧弁53からのパイロット圧を第4パイロット管路4P2を介して走行用切換弁20Rの後進側に入力させ、第4減圧弁54からのパイロット圧を第3パイロット管路3P2を介して走行用切換弁20Lの後進側に入力させる方向切換弁30とを備えていることを特徴とする。
(もっと読む)
建設機械のポンプ制御装置
【課題】作業時の作業能率と走行性能を両立させ、かつ、作業時の燃費を改善する。
【解決手段】油圧ショベルにおいて、ポンプ圧に応じてポンプ流量を制御する馬力特性として、低圧側は共通で中圧及び高圧側での馬力が異なる第1及び第2のPQ特性I,IIを設定し、走行操作時は中、高圧側の馬力が相対的に高い第1のPQ特性I、作業操作時は中、高圧側の馬力が第1のPQ特性Iよりも低くてポンプ圧が上がるほど馬力が低下する第2のPQ特性IIをそれぞれ選択するように構成した。
(もっと読む)
1 - 20 / 360
[ Back to top ]