
Fターム[2D129BA16]の内容
Fターム[2D129BA16]に分類される特許
1 - 14 / 14
杭建込み施工管理装置およびプログラム
【課題】施工品質を向上させることのできる杭建込み施工管理装置およびプログラムを得る。
【解決手段】杭建込み施工管理装置30により、管理対象とする杭の少なくとも径および長さが含まれる杭仕様情報、および杭を建込む地盤の土質を示す土質情報を取得し、取得した杭仕様情報および土質情報に基づいて、掘削機20により、建込み孔を掘削により造成した後に当該建込み孔に杭を建込む施工を行う際の、施工時間の経過に伴う建込み孔の造成時の掘削ヘッドの先端位置および杭の建込み時の当該杭の先端位置の変化を示す施工サイクルタイム情報を導出し、杭建込み施工支援装置40により、施工サイクルタイム情報に基づいて、当該施工サイクルタイム情報により示される施工時間の経過を一方の軸とし、掘削ヘッドの先端位置および杭の先端位置を他方の軸としたグラフを示すグラフ情報を作成し、作成したグラフ情報により示されるグラフを表示する。
(もっと読む)
根固め球根部の施工管理方法とそれに用いる拡大掘削装置

【課題】杭孔先端部を拡大掘削して根固め球根部を築造するにあたり、振動、水圧、掘削土による圧力が大きい過酷な環境下においても、故障する心配がない簡単な構成によって、拡大翼が実際に開いたか否かを確実に確認できるようにする。
【解決手段】拡径状態と縮径状態に切り換え可能に構成された拡大翼8により杭孔先端部を拡大掘削する拡大掘削装置4における拡大翼の可動範囲の終端位置と重なる位置に、拡大翼が拡径状態に切り換わることによって拡大翼で押し潰されるカートリッジ式の確認用部材11を設けておき、拡大掘削装置を地上に引き上げた後、確認用部材の変形状態を目視確認することにより、地中で拡大翼が実際に開いたことを確認する。
(もっと読む)
杭穴掘削ヘッド
【課題】2つの掘削腕の揺動をカムを介して、1本の操作ロッドの昇降として伝達して、この昇降を地上で目視できる。
【解決手段】杭穴掘削ヘッド1は、第一掘削腕14及び第二掘削腕15を有するヘッド本体2の上端に、掘削ロッド5の下端部に連結するための連結部18を有し、掘削腕14、15の位置を確認するヘッド操作体3を連設して構成する。掘削腕14、15は逆回転して大きく揺動して拡大掘削する。この際に、ヘッド操作体3にカム23〜26を設ける。掘削腕14の揺動→第一カム23→第三カム25と、掘削腕15の揺動→第二カム24→第三カム25と伝え、第三カム25→第四カム26→操作ロッド27(1本)の昇降と伝える。
(もっと読む)
拡張掘削ビットおよびそれを用いた掘削方法
【課題】簡易な構造で、確実に拡径孔を底部に形成でき、拡径孔の形成を容易に確認できる基礎工事用掘削ビットおよび掘削方法を提供する。
【解決手段】掘削ロッド2の下端に接続されて、掘削ロッドの逆回転時には拡径して正回転時には縮径する拡大爪4を螺旋羽根の外周縁に備え、拡大爪の基部4aは螺旋羽根の主面1aの直角方向に回動可能に枢支され、拡大爪の基部4aと拡大爪先端部4bとの間に、基部の回動方向と同一方向に回動可能に一端が支持されるL型確認ピン5を有し、このL型確認ピンの他端を収納できるピンケース7を前記螺旋羽根の主面に有し、掘削ロッドの掘削開始の正回転時においてL型確認ピンの他端がピンケースに収納できると共に、掘削ロッドの逆回転によりL型確認ピンの他端がピンケースから脱離できる。
(もっと読む)
発破穿孔さし角制御システム
【課題】少ないセンサで穿孔さし角を制御し、発破効率の向上、余掘りの低減を実現することができ、汎用性が高く、コスト削減が可能な発破穿孔さし角制御システムを提供する。
【解決手段】穿孔始点設定手段によって設定した穿孔始点位置でブーム14に支持されたガイドセル18上を平行に稼動する穿孔機16を用いて穿孔を行う際の発破穿孔さし角制御システムであって、ブーム14に取り付けられてブーム14の水平角を検出することでガイドセル18の水平角を検出する水平角検出センサ34、36と、ブーム14に取り付けられてガイドセル18の鉛直角を検出することでガイドセル18上を平行に稼動する穿孔機16先端の鉛直角を検出する鉛直角検出センサ38とを有し、水平角検出センサ34、36により検出された水平角と、鉛直角検出センサ38により検出された鉛直角とに基づいてガイドセル18上の穿孔機16先端の穿孔さし角を設定可能とされている。
(もっと読む)
削孔機
【課題】削孔に係わる作業精度と作業効率を簡便かつ安価な手法で改善する。
【解決手段】台車1とブーム4とガイドシェル5とドリフター6と削孔ロッド7を備えるドリルジャンボに、作業員による操作を案内するためのガイド手段を備える。ガイド手段は、削孔ロッドによる削孔角度および削孔距離を検知する検知手段と、予め設定した目標削孔角度および目標削孔距離を表示するとともに前記検知手段により検知した実際の削孔角度および削孔距離を併せて表示する表示手段としてのモニタを備える。検知手段は、台車とブームとガイドシェルとドリフターの位置およびそれらの姿勢を検出するセンサ13〜17と、各センサによる検出情報に基づいてその時点の削孔角度および削孔距離を演算し記憶する演算記憶手段としてのプログラマブルコントローラとにより構成される。
(もっと読む)
孔内データ収集システム
【課題】伝送速度及び伝送可能深度を十分大きくでき、そのため孔内データをリアルタイムで伝送することができ、しかもシステムを安価に構築でき、システム維持も容易に行えるようにする。
【解決手段】孔内データを得るためのセンサー及び関連機器を搭載した計測ゾンデ10と、計測ゾンデを吊り下げるワイヤー12と、ウインチ装置14と、地上観測装置16を具備し、ワイヤーにより計測ゾンデを孔内に挿入し、計測した孔内データを地上観測装置で収集するシステムである。ワイヤーは、長手方向に複数箇所に分散配置したロータリージョイント18を介して複数の多芯ケーブル20を機械的並びに電気的に順次接続した1本のケーブル構造体であり、ロータリージョイントは、ロータリー式の信号カプラを内蔵し、上部ケーブルと下部ケーブルとの間での相対回転が許容され、且つ多芯ケーブルの抗張力と同等以上の引張耐力を有し、電気信号の伝送を可能とする。
(もっと読む)
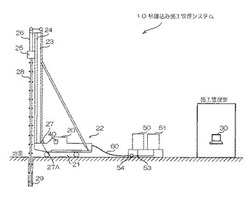
既製杭建込み施工管理装置
【課題】高精度な施工管理を容易にできる既製杭の建て込み工法における施工管理装置の提供。
【解決手段】実施工データ計測手段によって計測された実施工時計測データと所定の基本条件データとをコンピュータ29によるデータ処理によって比較し、実施工時計測データが各施工段階の基本条件データを満足することによって各施工段階の終了を判別できる表示を表示手段36,37に表示させるようにした。
(もっと読む)
掘削機械、掘削方法、及び掘削プログラム
【課題】1回の掘削ステップで、決められた土砂回収量を掘削できる掘削機械、掘削方法、及び掘削プログラムを得る。
【解決手段】拡径掘削バケット22の深度は深度検出部17で検出され、側壁板30の拡径量は変位量センサ73で検出される。シーケンサA27は、拡径掘削バケット22の1回の掘削量が土砂回収バケット96の設定回収量と等しくなるように、深度と掘拡径量を算出し、掘削可能領域を決定してモニタ35に表示する。操作者は、表示された掘削可能領域に合わせて掘削を行う。これにより、中間拡径部56における1回の掘削時の土砂回収量が土砂回収バケット96の設定回収量となるので、回収しきれない土砂が縦孔20の底部に落下するのを防ぐことができる。また、1回の掘削における掘削量を土砂回収バケット96の最大回収可能量とすることにより、拡径掘削バケット22を地上へ引き上げる回数が必要最小限の回数となり、施工効率が上がる。
(もっと読む)
杭穴掘削ヘッド
【課題】ストッパー受けの高さを認識することにより、掘削腕の揺動角度から、地上で掘削径を目視により把握できる。
【解決手段】杭穴掘削ヘッド50は、ヘッド本体1の水平軸27に、上端にストッパー35を有する掘削腕30を、揺動自在に取り付けてなる。ヘッド本体1の昇降軸部10に第一保持切欠20、第二保持切欠22を有するストッパー受け27を昇降自在に取り付ける。 掘削ロッド50の正回転で、ストッパー受け17の下降位置で第一保持切欠20がストッパー35を係止し、掘削腕30が小径D1で掘削する(a)。逆回転により、上昇位置で、第二保持切欠22がストッパー35に係止して大径D2で掘削する(b)。ストッパー受け27に取り付けた操作ロッド28の目印ライン29で、上昇位置と下降位置の相違H0を確認できる。
(もっと読む)
削岩機搭載台車における穿孔位置決め制御方法及び建設機械におけるブーム位置決め制御方法
【課題】既存の削岩機搭載台車に対し穿孔位置決め制御機能を持たせる。
【解決手段】ドリルジャンボ1に三次元スキャナー9を設置するとともに、コンピュータ2を設置し、コンピュータ2に予め、前記削岩機13及び/又はガイドシェル12の形状、寸法データを登録しておき、三次元スキャナー9により三次元点群データを取得し、コンピュータ2によって三次元モデルを生成するとともに、該三次元モデルと、予めコンピュータ2に登録された前記削岩機13及び/又はガイドシェル12の形状、寸法データとのパターンマッチングを行い、削岩機13及び/又はガイドシェル12を特定し、削岩機13及び/又はガイドシェル12の位置及び方向を把握する。また、削岩機13及び/又はガイドシェル12について三次元点群データの欠損がある場合、予め登録されている削岩機13及び/又はガイドシェル12の形状、寸法データに基づき、該欠損部分を補完する。
(もっと読む)
削岩掘削装置用ユーザインタフェース
本発明は、多段階削岩作業を行う削岩掘削装置を制御する制御装置に関する。本制御装置は、作業段階インジケータを表示装置上に表示するよう構成され、削岩段階別情報要素がさまざまな作業段階と関連付けられる。制御装置は、削岩作業の段階を指定し、作業段階インジケータを更新して、その指定した作業段階に従って少なくとも1つの表示情報要素を表示する。
 (もっと読む)
(もっと読む)
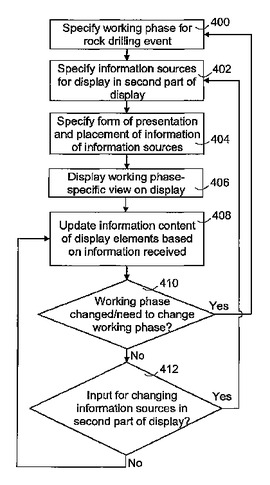
削岩装置用の適応ユーザインタフェース
本発明は、削岩装置を用いて行われる多段階削岩作業を制御する制御装置に関する。削岩装置またはその制御ユニットのディスプレイでは、第1の部分が、実質的に一定の情報源用に設定でき、第2の部分が、削岩状況に応じて切り換えられる情報源用に設定できて、それに関連した情報が前記削岩状況時に表示される、少なくとも1つの情報源に関して、削岩状況を特定するように、定義が制御装置にセットされる。削岩作業の作業段階を照合し(400)、前記定義に基づいて前記段階に適した情報源を選択する(402)。削岩段階の実行中に、少なくとも1つの選択した情報源に関連した情報を前記表示部分に表示する(406)。
 (もっと読む)
(もっと読む)
穿孔装置
【課題】 従来の穿孔装置では、案内ロッドを先行孔内に挿入する作業が困難である。
【解決手段】 操縦機2に連結される基台4と、基台に前後移動可能に設けられた削岩機5と、基台の前部に設けられた支持部7と、支持部に連結されて前方に突出する案内ロッド6とを備え、削岩機により削岩機のドリル部3を案内ロッド6の軸線に沿った方向に前後に移動させる穿孔装置において、案内ロッド6及び案内ロッドの前方を撮像する撮像装置61と、撮像装置61からの映像信号を映す表示装置66とを備えたことを特徴とする。
(もっと読む)
1 - 14 / 14
[ Back to top ]