
Fターム[2F063CA08]の内容
電気磁気的手段を用いた長さ、角度等の測定 (19,512) | 目的 (1,548) | SN比向上、ノイズ除去 (166)
Fターム[2F063CA08]に分類される特許
121 - 140 / 166
移動体システム
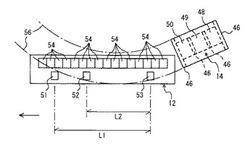
【構成】 レール側に永久磁石48〜50を走行方向に配列した被検出プレート14を設ける。天井走行車側には、コイル54を走行方向に配列すると共に、被検出プレート14を検出するための光センサ51〜53を備えたリニアセンサ12を設け、被検出プレート14と上下方向に対向させる。光センサ51〜53でカーブ区間と直線区間を識別し、リニアセンサの有効範囲を変更する。
【効果】 給電線からのノイズの影響が小さく、かつカーブ区間でも位置を認識できる。
(もっと読む)
クリアランス測定システムおよび動作方法

【課題】クリアランス測定システムを提供すること。
【解決手段】クリアランス測定システム(12)は、通常なら連続する表面幾何形状を有する第1の物体(14)上に配設された参照幾何形状(86)と、第2の物体(16)上に配設されたセンサ(64)とを含む。センサ(64)は、第1の物体(14)からの第1の感知パラメータを示す第1の信号と、参照幾何形状(86)からの第2の感知パラメータを示す第2の信号とを生成するように構成される。クリアランス測定システム(12)はまた、第1と第2の物体(14、16)の間のクリアランスを推定するために、第1および第2の感知パラメータの間の測定差に基づいて、第1および第2の信号を処理するように構成された処理ユニット(198)を含む。
(もっと読む)
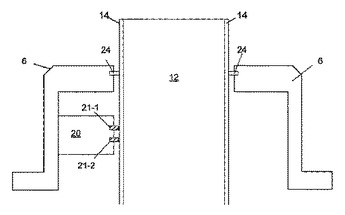
ギャップ検出装置
【課題】 プラズマの発生状況が変化しても、精度よくノズルとワーク間のギャップを検出することができるギャップ検出装置を得ることを目的とする。
【解決手段】 中心電極ケーブル4を通る合成信号における周波数f1の成分と周波数f2の成分を検波する検波部8を設け、その検波部8により検波された周波数f1の成分と周波数f2の成分からノズル5とワーク6間のギャップに対応する検出信号を生成する。これにより、プラズマの発生状況が変化しても、精度よくノズル5とワーク6間のギャップを検出することができる。
(もっと読む)
静電容量型デジタル式パネル位置検出装置
【目的】 移動体と位置検出装置とは非接触でかつ移動体構造は自由でリニアな位置を検出する。
【構成】 電極の静電容量変化を捉えてスイッチのON/OFFを確立する静電容量型デジタル式パネル装置で、切り替えスイッチ回路を搭載し、一つの発振回路に対し順番にスイッチとして機能する電極を接続させる事で、電極間の不要な相互干渉を削減して近接して多くの電極を設ける事が可能なものにおいて、PETシート上に電極を等間隔に直線的に多数配置したものの上を容量変化を起こす誘電体を組み込んだ構造物をスライドさせる事で、構造物の位置を特定する静電容量型デジタル式パネル位置検出装置。
(もっと読む)
近接度の検出のために電荷移動静電容量センサを保護するための方法およびシステム
複数の検知電極および少なくとも1つの保護電極を有するセンサにおける近接度の検出のために可測キャパシタンスを決定する方法、システムおよび装置が記載される。電荷移動プロセスが、少なくとも2回の実行回数、実行される。前記電荷移動プロセスは、第1のスイッチを使用して前記複数の検知電極の少なくとも1つに所定の電圧を印加するステップと、第2のスイッチを使用して前記少なくとも1つの保護電極に第1の保護電圧を印加するステップと、前記複数の検知電極の前記少なくとも1つと、フィルタキャパシタンスとの間で電荷を再分配するステップと、前記少なくとも1つの保護電極に、前記第1の保護電圧と異なる第2の保護電圧を印加するステップとを有する。近接度の検出のために前記可測キャパシタンスを決定すべく、少なくとも1つの結果を得るために、少なくとも1回の測定回数、前記フィルタキャパシタンス上の電圧が測定される。 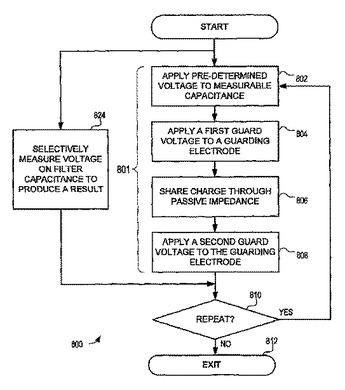 (もっと読む)
(もっと読む)
封書内容物の測定方法及び測定装置
【課題】
測定環境の変化に影響されない基準値及び測定値を確保することにより、封書内容物の枚数、厚み、材質等を開封することなく精度良くかつ簡単に判定することが可能な封書内容物の測定方法及びその装置を提供する。
【解決手段】
所定の間隔を有して配置された測定間隙と基準間隙の2つの間隙を形成する3つの電極と、2つの間隙の物理量を測定する測定回路と、該測定回路で測定した測定間隙と基準間隙の各物理量の比を求めて封書内に収容されている内容物の枚数、厚み、材質の少なくとも一つを判定する判定手段と、を備えることを特徴とする。前記3つの電極は、積層配置されるかもしくは並設配置されることにより、測定間隙と基準間隙が近接配置されて両間隙が同環境に設定されており、また、前記測定回路は、差動容量型センサの信号処理回路として機能する。
(もっと読む)
位置センサ及び該位置センサを搭載した磁気軸受装置
【課題】 検出された位置信号の交流リップル分を低減できると共に、位相遅れの少ない位置センサ、及びこの位置センサを適用することで安定し、かつ振動のより少ない磁気軸受装置を提供する。
【解決手段】 搬送波発信器201及びセンサ107とで構成された位置信号検出部と、該位置信号検出部から抽出された信号と前記搬送波発信器201の信号とを乗算する乗算器231と、該乗算器231の出力信号を分岐し、該分岐された一方の信号を遅延させる遅延器237と、該遅延器237の出力信号と前記分岐された他方の信号とを加算する加算器235とを備えて構成した。
(もっと読む)
センサモジュール及びそれを用いた角度検出装置
【課題】 特に、完全停止状態及びアイドリング状態等の基本状態において、磁気抵抗素子を構成するピン層の固定磁化方向を適正化することで、回転角度の検出精度を向上させることが可能な角度検出装置を提供することを目的とする。
【解決手段】 エンジンを切った完全停止状態、及びエンジンはかけているが自動車を停止させているアイドリング状態(これらを基本状態という)では、スロットルバルブシャフト4の軸心Oと交差する外部磁界Hの方向から、複数個の磁気抵抗効果素子G1〜G8のピン層の磁化方向をすべて45度傾ける。これにより前記基本状態にて各ピン層の磁化が前記外部磁界Hにより揺らぐ現象を抑制でき、検出精度に優れたスロットルポジションセンサを製造することができる。
(もっと読む)
位置角度検出装置およびこれを用いたヘッドモーショントラッカ
【課題】 電磁ノイズが重畳された信号を受信した場合であっても、ノイズの影響を除去して正確な位置・角度を得ることができる位置角度検出装置を提供する。
【解決手段】 交流基準信号を生成する基準信号生成部と、交流基準信号に基づいてコイルを励磁することにより空間に交流磁界を発生する磁気ソースと、交流磁界が発生している空間内の任意の地点における交流磁界を検出する磁気センサと、磁気センサから出力される検出信号に含まれるノイズ成分を抽出するノイズ成分抽出部と、検出信号からノイズ成分を除去した訂正検出信号を生成する訂正検出信号作成部と、訂正検出信号に基づいて磁気センサの位置および角度を算出する位置角度演算部とを備え、算出した磁気センサの位置および角度から磁気センサを取り付けた物体の位置および角度を求める。
え、算出した測定誤差をグラフィック表示する。
(もっと読む)
非接触回転変位センサ
【課題】 大きな検出出力が得られるようにし、良好かつ安定した性能を有する非接触回転変位センサを提供する。
【解決手段】 一対の軟磁性材リング21,22よりなり、一方の部位に取り付けられるロータ20と、他方の部位に取り付けられ、ロータ20の外周面と間隙35を介して対向するリング状磁石31と、磁石31の外周面に配されたバックヨーク32と、磁気センサ33とを備える。磁石31は径方向に着磁され、かつ周方向に多極配列された構造を有し、リング21,22は空隙34を介して対向する内周部25,26と、その内周部から外側に突出され、互いに近づく方向に曲げられて周方向交互に位置する歯23,24とを有する。各歯23,24の数は磁石31の着磁極数の半分とされ、空隙34内に磁気センサ33が配される。ロータが磁石の内周側に位置するため、空隙34の検出磁界を大きくできる。
(もっと読む)
移動する構成要素の位置を磁気的に感知するシステムおよび方法
シリンダに対して動いているピストンロッドの位置を磁気的に感知するための位置感知システム。ピストンロッド上の磁気的硬質層は、記録媒体を提供する。情報は、磁気的硬質層の領域に磁気的に記録されている。このような領域は、ピストンロッドの位置を決定するための相対符号化方式を提供する。磁場センサーが、磁気的に記録された領域の冗長トラックを覆って配置されている。所与のトラックを覆って配置された各磁場センサーは、ピストンロッドがシリンダに対して動く間、同一の磁化領域を感知する。別の磁場センサーは、同相除去を実施する際に使用する周囲場を感知することができる。書込みヘッドが、磁場センサーによって検出された損傷または消去された領域を動的に修復することができる。バッテリーバックアップ電源によって活性化されて、磁場センサーと関係する回路は、機械装置がオフの間に引き続いてピストンロッドの動きを追跡することができる。
 (もっと読む)
(もっと読む)
位置検出装置
【課題】製造コストの低減を図りつつ高い位置検出精度を確保する上で有利な位置検出装置を提供する。
【解決手段】ヘッドホルダ20は、ホルダ本体22と、連結部23を備え、ホルダ本体22は連結部23により磁気スケール10の延在方向に往復直線移動可能に配設されている。磁気センサ30は、ヘッドホルダ20の長さ方向の中央部で孔2202に臨ませて配設されている。クランプ部材24は、大径孔2204に配設されている。クランプ部材24は、基部2402と、2つのアーム部2404とを備え、基部2404には、パイプ材12の外面に当接可能な基準面2406が形成されている。2つのアーム部2404の先端にはパイプ材12の外面に当接することでパイプ材12の外面を基準面2402に押し付ける方向に付勢する凸部2408がそれぞれ設けられている。
(もっと読む)
共通モード修正巻線及び簡素化された信号処理を有する誘導位置センサー
回転運動用誘導位置センサーは、送信コイル、及び送信コイルが交流電源により励磁される時に受信機信号を生成する受信コイルを含む。可動カプラー要素は、受信機信号がカプラー要素の位置に感応するように、送信コイル及び受信コイルとの間の誘導結合を変更する。受信機信号及び参照信号の比率は、カプラー要素の位置に感応するが、共通モード因子には実質的に感応しない。位置センサーの角度範囲又は位置範囲は、複数の受信コイルを使用して増大させることができる。 (もっと読む)
レベル計測装置
【課題】 本発明は、回転部材に電気エネルギを要する部材を設ける必要がなく、したがって構造が簡単で電気系統の接触不良が生じるおそれはまずなく、安定性の高い正確なレベル計測を行なうことができる装置を提供することを課題とする。
【解決手段】 上記課題を解決するために、本発明に係るレベル計測装置の代表的な構成は、ワイヤドラム1に接続された第一歯車4と、検出軸10に接続された第二歯車5と、第一歯車4と第二歯車5とを接続する遊星歯車7と、遊星歯車7を自転可能に軸支し且つ検出軸10と同軸にて公転させるキャリア6と、キャリア6に取り付けられたマグネット8と、マグネット8の軌道の近傍に配置されその離接を検知する磁電変換器12と、キャリア6にワイヤの巻き取り方向の付勢力を与える弾性体9とを備える構成とした。
(もっと読む)
ディスクの外径計測方法、及びディスクの外径計測装置
【課題】 ディスク外径を高精度かつ廉価に計測することができる新規な方法及び装置を提供する。
【解決手段】 外径公知の参照ディスク11と外径未知の計測ディスク12とを準備し、参照ディスク11の外周部と静電容量センサとで形成される基準空間の静電容量Cr及び計測ディスク12の外周部と静電容量センサとで形成される計測空間の静電容量Cmを比較し、それらの相対的な大きさ及び参照ディスク11の外径Drに基づき、計測ディスク12の外径Dmを計測する。
(もっと読む)
磁気マーキングによって包装材料の位置を検出する位置検出器および方法
包装材料(314、514、714)の位置を磁気マーキング(312、512、712)によって検出する位置検出器装置(100、200、900)において、位置検出器装置は、それぞれが出力信号を出す出力部を有する複数の磁気センサを含むセンサ・アセンブリを含み、磁気センサは、少なくとも2組のペア(208、209、301、302、501、502、701、702)として配置され、各ペア磁気センサは、それぞれ感度方向(308、309、310、311、508、509、510、511、708、709、710、711、808、809、811)が反対向きに配置され、更に、センサは、包装材料の磁気マーキングを感知するように配置され、センサの出力信号を合計して合計信号とするように設けられた結合器(210、211、212、910、912、914、1100、1203、1301、1302、1303)を含む磁気センサの出力部に結合された信号処理アセンブリ(104)を含み、包装材料の位置を合計信号から判定するように配置された検出機を含む。更に、包装材料を磁気マーキングによって検出する方法が開示される。  (もっと読む)
(もっと読む)
検出装置
【課題】 対象物の表面の形状を高い精度で検出する。
【解決手段】 検出装置は、対象物と対向して検出用容量50を形成する検出用電極51と、静電容量CRを有する基準容量素子との接続点Nの電位に応じて対象物の表面の形状を検出する。対象物の凸部が検出用電極51と対向するときの検出用容量50の静電容量をCXRとし、対象物の凹部が検出用電極51と対向するときの検出用容量50の静電容量をCXVとすると、基準容量素子の静電容量CRは、CR>(CXR・CXV)1/2を満たすように選定される。
(もっと読む)
シリンダの位置計測装置
【課題】
リセットセンサで検出される信号のピークを正確に求めるようにして、ストローク位置センサの原点位置へのリセットを高精度に行えるようにする。また、シリンダチューブ内部のピストン等の直動部材の移動速度如何にかかわらず、正確に原点位置(特定位置)を計測できるようにする。
【解決手段】
回転センサ100の検出回転量から得られるピストン201の計測ストローク位置Inと、磁力センサ301の検出信号(磁力;電圧値)Vnとの対応関係500を求め、この対応関係500に基づいて、ピストン201が原点位置I0に達したときの計測ストローク位置Ip(ピーク位置)を求め、この計測ストローク位置(ピーク位置)Ipを、原点位置I0にリセットする。
(もっと読む)
静電容量検出装置及び電子機器
【課題】対象物表面の平坦部分でも対象物表面の距離検出(凹凸形状検出)が精度良く行える静電容量検出装置を提供する。
【解決手段】マトリクス状に配列された複数の静電容量検出器10と、マトリクス上で互いに近接する位置に存在する2つの静電容量検出器10を逐次的に選択する選択手段30と、選択された2つの静電容量検出器の2つの出力信号を比較する比較判別手段20と、を備え、選択された2つの静電容量検出器10のうち一方の静電容量検出器10は対象物と検出電極との距離に応じてレベル変化する静電容量に基づく出力信号Io(VG)を発生し、他方の静電容量検出器10は一定レベルの比較基準信号Ir(Vr)を出力する。
(もっと読む)
ピエゾアクチュエータの変位量の計測方法、及びピエゾアクチュエータの駆動装置
【課題】アクチュエータとして機能するピエゾ素子を介して流れる電流量の増加操作及び減少操作を繰り返すことで前記ピエゾ素子の変位量を制御するに際し、変位量を適切に計測する。
【解決手段】ピエゾ素子を伸長制御すべく、これに充電処理を施しているときに電圧によってピエゾ素子の変位量を計測すると、ピエゾ素子の電圧振動に起因して変位量を一義的な値として計測できない。そこで、電圧の積分値を用いることで、こうしたピエゾ素子の電圧振動に起因した問題を回避しつつピエゾ素子の変位量を計測する。
(もっと読む)
121 - 140 / 166
[ Back to top ]