
Fターム[2F063CA08]の内容
電気磁気的手段を用いた長さ、角度等の測定 (19,512) | 目的 (1,548) | SN比向上、ノイズ除去 (166)
Fターム[2F063CA08]に分類される特許
61 - 80 / 166
回転角度検出装置

【課題】磁石間の干渉を低減した高精度の回転角度検出装置を提供する。
【解決手段】回転体の回転に従属して回転する2つ以上のセンサ歯車2a,2bと、該センサ歯車2a,2bに取付けられた磁石3a,3bと、該磁石3a,3bの磁束から前記センサ歯車2a,2bの回転角信号を検出する磁気センサ5a,5bと、該磁気センサ5a,5bからの前記センサ歯車2a,2bの回転角信号から回転体の絶対角を算出する演算装置7とを有する回転角度検出装置100において、前記磁石3a,3bと磁気センサ5a,5bとの組を一括してシールド部材4a,4bで囲む。
(もっと読む)
切替電力供給ノイズの抑制を伴う磁歪変位変換器
変換器116は、磁歪要素102上の繰り返しパルス120を感知し、変換器出力バースト122を提供する。変換器回路126は、変換器出力バーストを検出する。エネルギー貯蔵デバイス130は、変換器回路の電力入力128に結合する。切替電力供給132は、エネルギー貯蔵デバイスに結合し、その間に切替電力供給の切替が抑制される繰り返し抑制状態を有する。シーケンス回路140は、変換器出力バーストとの切替電力供給の繰り返し抑制状態の同期化を提供する。 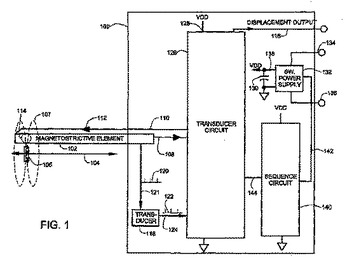 (もっと読む)
(もっと読む)
ポジションセンサ

【課題】非接触によって、安定して2次元のポジションを検出することができるポジションセンサを提供する。
【解決手段】レバー10に設けられたカウンター磁石2と、バイアス磁界を発生するバイアス磁石4と、感磁方向が直交する第1及び第2のMR素子35、36からなるハーフブリッジ回路を十字の各頂点に第1〜第4のハーフブリッジ31〜34としてそれぞれ配置し、傾倒操作に基づくバイアス磁界の方向の変化に基づいて、対向する第1及び第3のハーフブリッジ31、33から出力電圧V1、V3、及び対向する第2及び第4のハーフブリッジ32、34から出力電圧V2、V4、を出力するMRセンサ3と、MRセンサ3から出力された出力電圧V1〜V4に基づいて傾倒操作によって指示された2次元のポジションを判断する判断部5と、を備えることを特徴とするジョイスティック1を提供する。
(もっと読む)
位相検波方式静電容量型近接センサ
【課題】交流ブリッジ方式の静電容量型近接センサでは、ブリッジがバランスすると出力電圧がおのずと低くなり、相対的にノイズの影響を受けやすく静電容量の微小変化に対して検出感度と動作安定度が低いという欠点があり、ガラスや合成樹脂等の絶縁体でできたアンプルやスピッツ管中の少量の薬液の液面を検出する場合には、安定的に運用することが至難であった。
【解決手段】検出用電極13と対象物との間に生ずる静電容量をインダクタ11とコンデンサ12とからなる共振回路の一部として組み込んだ共振回路を、励振電源1で駆動される可変電流源10を介して励振し、励振電圧と共振電圧との位相差を位相検波器14で検出するように構成し、共振点付近では共振容量のわずかの変化で、励振電圧に対する共振電圧の位相が敏感に変化することを利用する。
(もっと読む)
微動ステージ装置、微粗動アクチュエータ装置、及び磁気ヘッド検査装置
【課題】本発明は、ステージを支持する基体2と、この基体2に設けられ前記ステージを微動可能に支持する支持部と、ステージを微動動作させる手段と、ステージの微動量を検出する変位センサ手段とを具備した微動ステージにおいて、変位センサ手段の分解能を向上させることを目的とする。
【解決手段】本発明は、ステージを支持する基体と、前記基体に設けられ、前記ステージを微動自在に支持する支持体と、前記ステージを微動作動させる微動駆動手段と、前記ステージの微動を検出する変位センサ手段を有する微動ステージ装置において、前記変位センサ手段は、前記ステージの微動量を検出するプローブ部と、前記プローブ部が検出した検出信号を処理するアンプ部と、前記プローブ部の検出信号を前記アンプ部に送信するケーブルを有し、微動ステージ装置の内部に、前記プローブ部、前記アンプ部、および前記ケーブルを内置したことを特徴とする。
(もっと読む)
磁気軸受に支承されたシャフトのためのセンサ構造
本発明は、磁気軸受(2)に支承されたシャフト(1)のためのセンサ構造に関するものであり、磁気的にシールドされた領域を形成しながら磁気軸受(2)をシールドする磁気シールドと、磁気シールドされた領域でシャフト(1)に配置された磁気コーディング(10)と、磁気コーディング(10)の磁界の少なくとも1つの変化を検出する少なくとも1つの受信器(11)とを含んでいる。上述したセンサ構造は、本発明によると、シャフト(1)の磁気コーディング(10)を用いてシャフト(1)の位置をできるだけ磁気軸受(2)の近傍で検出することを可能にする、磁気軸受(2)に支承されたシャフト(1)のためにセンサ構造を提供するという課題を解決する。 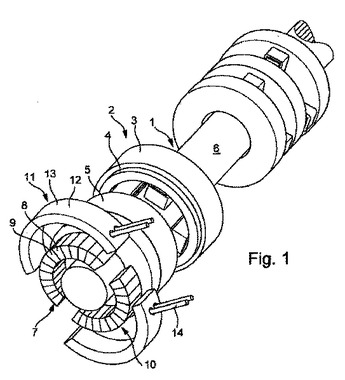 (もっと読む)
(もっと読む)
絶対変位検出方法及びその方法を用いた絶対変位センサ
【課題】 相対変位のポジティブフィードバックの困難な調整を必要とすることなしに極低周波数まで検出範囲を広げることができると共に絶対変位を安定して検出することができる絶対変位検出方法及びその方法を用いた絶対変位センサを提供すること。
【解決手段】 絶対変位センサ1は、被検出体としてのセンサハウジング2と、センサハウジング2にばね係数k及び減衰係数cをもって可動に支持された質量mを有した質量体3と、質量体3に対するセンサハウジング2の相対速度を電気的に検出する検出手段4と、相対変位をポジティブに、相対速度を一次微分して得られた相対加速度をネガティブに夫々フィードバックさせて、センサハウジング2の絶対変位に起因する質量体3の絶対変位を制御するフィードバック制御手段5と、相対変位に位相遅れ補償を施す位相遅れ補償手段6とを具備している。
(もっと読む)
アクチュエータ及びアクチュエータのセンサ特性補正方法
【課題】アクチュエータにセンサを取り付ける場合に、組み付け誤差や個々のアクチュエータのメカニカル特性の差をより理想的なセンサ特性として補正可能でアクチュエータの出力精度を向上可能なアクチュエータ及びアクチュエータのセンサ特性補正方法を提供する。
【解決手段】このアクチュエータ100は、センサ113が搭載されており、センサはアクチュエータへの取り付け後にセンサ特性の書き換えが可能である。
(もっと読む)
局所的な測定範囲におけるコイル配置構造
【課題】外乱の影響を受けないコイル配置構造を提供すること。
【解決手段】コイル配置構造において、a)コイル対を、フラットコイルとして形成するとともに測定範囲内で互いに重ね合わせ、このとき、この重ね合わされた範囲が測定範囲を形成し、b)前記測定範囲の各端部において前記コイル対にその長さについての余剰部を形成し、c)渦電流式制振要素を、前記コイル対に対して変位可能に形成するとともに該コイル対における両コイルの少なくとも一部を覆うように形成し、d)測定発振器を有する前記コイル対におけるコイルそれぞれが、局所の関数としての発振器周波数の線形特性線を有しており、e)該各線形特性線が、外乱、すなわち前記間隔のばらつき、測定方向への傾斜及び温度変化にかかわらず一定の回転中心を前記測定範囲の外方に有している。 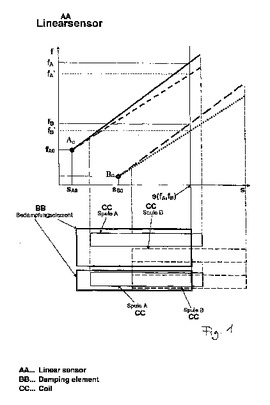 (もっと読む)
(もっと読む)
位置検出装置
【課題】誤作動を防止した位置検出装置を提供する。
【解決手段】第1及び第2のMRセンサ131A、131Bは、第1及び第2の方向2,3からカウンターマグネット132の磁力線が横切るとき、磁気抵抗が最大になるように構成されている。ECU14は、第1及び第2のMRセンサ131A、131Bから出力された出力電圧が、しきい値140より大きいときを「H」、小さいときを「L」とする2値とし、この2値の組合せとシフトマップ141に基づいてカウンターマグネット132の位置を判断する。
(もっと読む)
多次元位置センサ
コントローラと、可動部と搬送経路とを有し前記コントローラと連通するワークピース搬送機と、前記可動部に固着した少なくとも1つの界生成プラテンと、搬送経路に沿って配置されコントローラと連通する少なくとも1つのセンサ群とを含み、前記界生成プラテンが位置計測とともに可動部を推進させるように構成される多次元測位装置とを備える装置であって、前記の少なくとも1つのセンサ群の各センサは、少なくとも1つの界生成プラテンで発生させる検知界内の単軸に沿ったばらつきに対応する1つのみの出力信号を提供するように構成され、前記コントローラは、前記の少なくとも1つのセンサ群の各センサに隣接した前記可動部の多次元位置を、前記の少なくとも1つのセンサ群内の少なくとも1つのセンサの前記1つのみの出力信号に基づいて、多次元位置には、少なくとも平面位置と、ワークピース搬送機と少なくとも1つの前記センサ群との間のギャップとを含めて算出するよう構成されている装置。 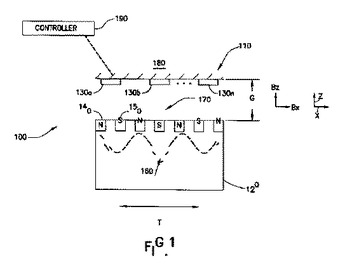 (もっと読む)
(もっと読む)
リニアセンサ
【課題】本発明は、第1コア体の両側に形成した各突出磁極に巻線を巻回し、第1コア体の両側に第2コア体の複数の突出磁極を対応させ、第1、第2チャンネルセンサを形成することを目的とする。
【解決手段】本発明によるリニアセンサは、両側に突出する複数の第1、第2突出磁極(2,2A)を有する第1コア体(1)と、前記第1コア体(1)に対応して配設された第2コア体(6)と、前記第2コア体(6)の各内壁(6a,6b)に形成され前記第1、第2突出磁極(2,2A)に対応する複数の第3、第4突出磁極(15,15A)とを備え、第1、第2突出磁極(2,15)側で第1チャンネルセンサ(20)を形成し、第2、第4突出磁極(2A,15A)側で第2チャンネルセンサ(30)を形成した構成である。
(もっと読む)
リニアセンサ
【課題】本発明は、第1コア体の両側に形成した各突出磁極に巻線を巻回し、第1コア体の両側に各凹凸部を有する第2コア体を設け、第1、第2チャンネルセンサを形成することを目的とする。
【解決手段】本発明によるリニアセンサは、両側に突出する複数の第1、第2突出磁極(2,2A)を有する第1コア体(1)と、前記第1コア体(1)に対応して配設された第2コア体(6)と、前記第2コア体(6)の各内壁(6a,6b)に形成され前記第1、第2突出磁極(2,2A)に対応する第1、第2凹凸部(7,7A)とを備え、前記各第1突出磁極(2)側で第1チャンネルセンサ(20)を形成し、前記第2突出磁極(2A)側で第2チャンネルセンサ(30)を形成する構成である。
(もっと読む)
近接検出装置及び近接検出方法
【課題】 物体の接近を電極の浮遊容量により検出近接センサーにおいて、ノイズの影響を除去し、物体との距離が大きい場合でも高速で精度の高い位置検出を行うことの出来る近接検出装置を提供する。
【解決手段】 差動電極に位相の反転した充放電を行い、充放電の特性から差動電極の浮遊容量の和を求めることにより、ノイズをキャンセルされた浮遊容量から物体の接近や位置を検出するようにした。
(もっと読む)
位置検出システムおよび位置検出方法
【課題】外部からの電力供給により交番磁界を発生する一のマーカと、該交番磁界の周波数と同一またはその近傍に共振周波数を有する共振回路を備えた他のマーカとがともに存在した場合であっても、一のマーカの位置または方向を正確に検出する。
【解決手段】外部からの電力供給により、所定の周波数だけ離れた一組の第1の位置算出用周波数を有する第1の交番磁界を発生する第1のマーカ4と、一組の第1の位置算出用周波数に挟まれた略中心の周波数を共振周波数とする磁気誘導コイル5を搭載した第2のマーカ3と、その作動範囲の外部に配置され、第1の位置算出用周波数において磁界を検出する磁界検出部13と、検出された磁界から一組の第1の位置算出用周波数を有する一組の第1の検出磁界成分の強度の加算値を抽出する抽出部30と、抽出された加算値に基づいて第1のマーカ4の位置および方向の少なくとも一方を算出する位置方向解析部22とを備える位置検出システム1を提供する。
(もっと読む)
四肢の位置又は位置の変化を表す信号を生成するセンサ装置及び方法
本発明は、センサ装置、及び該装置に対する四肢、特に使用者の手の空間的位置、及び/又は動きを表す電子信号を生成する装置と方法とに関する。かかる電子信号は、データ処理装置、通信装置、及び他の電気機器で入力処理を実行するのに使用できる。本発明によるセンサ装置は、送信電極部と、交流電圧を送信電極に印可する電圧発生器と、第1、第2、第3の受信電極部と、を備え、前記第1、第2、第3の受信電極部は、高抵抗の読み出しシステムに接続される。好ましくは、前記第1、第2、第3の受信電極部は、インピーダンス変換システムの高抵抗入力部に接続され、各インピーダンス変換部の出力部に生じる電気的事象間の違いに基づいて、場所又は動きを示す情報が取得される。 (もっと読む)
レゾルバ
【課題】 駆動モータにより発生する漏洩磁束の変化により影響を受けることの少ないレゾルバを提供すること。
【解決手段】 モータ本体56に供給される電流量を検知する電流検知部72と、電流量をモータ本体56に流したときの漏洩磁束により発生する、レゾルバ80の検出角度誤差を電流量−検出角度誤差関係データ75として記憶するPROM74と、電流検知部72が検知した電流量に基づいて、PROM74の電流量−検出角度誤差関係データ75により、レゾルバ80の検出角度を補正する補正係数演算部76、補正部77とを有する。
(もっと読む)
複雑な幾何学形状を有する部品を検査するための多周波画像処理
【課題】複雑な幾何学形状を有する部品における小さな亀裂及び他の異常を検出する。
【解決手段】多周波渦電流信号からデータを収集することを含めた渦電流検査を含む。生検査画像の信号対雑音比を向上するために、位相解析を使用して多周波データが組合わされる。その後、通常はエッジ効果信号により隠蔽されると考えられる縁部34の亀裂及び他のきずと関連する信号を分離することを目的として、渦電流きず信号の周波数成分と相関するために、時空間フィルタを使用して画像が再処理される。
(もっと読む)
位置計測システム
【課題】演算誤差を低減し高精度かつ高速に計測することのできる位置計測システムを提供する。
【解決手段】可動鉄片、該可動鉄片を励振する励振巻線L0および出力巻線L1を有する可動鉄片変圧器001と、前記可動鉄片変圧器の励振巻線を励振する励振信号を生成する発振器002、前記励振信号をA/D変換するA/D変換器003、A/D変換器出力をフーリエ変換するフーリエ変換部005、フーリエ変換された励振信号の振幅を算出する振幅値算出部007、前記出力巻線に発生する出力信号をA/D変換するA/D変換器004、A/D変換器出力をフーリエ変換するフーリエ変換部006、フーリエ変換された出力信号の振幅を算出する振幅値算出部008、フーリエ変換された励振信号の振幅を算出する振幅値算出部出力とフーリエ変換された出力信号の振幅を算出する振幅値算出部の比を演算する除算部009、および該除算部出力にしたがって前記可動鉄片の位置を演算する位置演算部010を有する計測装置500を備えた。
(もっと読む)
位置検出システム、医療装置誘導システムおよび位置検出方法
【課題】外部からの電力供給により交番磁界を発生する一のマーカと、該交番磁界の周波数と同一またはその近傍に共振周波数を有する共振回路を備えた他のマーカとが共に存在した場合であっても、一のマーカの位置または方向を正確に検出する。
【解決手段】外部からの電力供給により第1の位置算出用周波数を有する第1の交番磁界を発生する第1のマーカ4と、位置算出用周波数と同一の共振周波数を有する磁気誘導コイル5を搭載した第2のマーカ3と、該第2のマーカ3の作動範囲の外部に配置され、第1の位置算出用周波数において磁界を検出する磁界検出部13と、検出された磁界から、第1の位置算出用周波数を有するとともに第1の交番磁界と同一の位相を有する第1の検出磁界成分を抽出する抽出部24と、抽出された第1の検出磁界成分の強度に基づいて第1のマーカ4の位置および方向の少なくとも一方を算出する位置方向解析部22とを備える位置検出システム1を提供する。
(もっと読む)
61 - 80 / 166
[ Back to top ]