
Fターム[2F065AA02]の内容
光学的手段による測長装置 (194,290) | 測定内容 (27,691) | 位置;移動量 (12,734) | 1次元 (834)
Fターム[2F065AA02]に分類される特許
101 - 120 / 834
位置検出装置、ロータリスケール、および位置検出装置を備える液体吐出装置
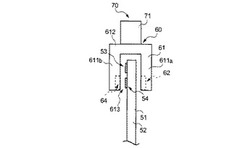
【課題】受光部における誤検出を防止可能なロータリスケールを具備する位置検出装置、ロータリスケール、および位置検出装置を備える液体吐出装置を提供すること。
【解決手段】被検出物の位置検出を行う位置検出装置であり、発光部62および受光部64を備え、これらの間に空間部613を備えるフォトセンサ60と、空間部613の間に差し掛かるロータリスケール51と、ロータリスケール51に設けられ、第1透光部および第1遮光部が交互に形成される位置検出パターン53と、ロータリスケール51に設けられ、第2透光部および第2遮光部が交互に形成され、通過する光量が位置検出パターン53を通過する光量よりも少なくなる汚れ検出パターン54と、フォトセンサ60を移動させて、位置検出パターン53の検出状態と汚れ検出パターン54の検出状態とを切り替えるセンサ位置切替機構70と、を具備している。
(もっと読む)
平面表示パネルの表示領域検出装置、表示領域検出方法、表示領域検出用プログラムおよび記録媒体

【課題】 表示領域の端部近傍に線欠陥が生じている平面表示パネルであっても、表示領域の端部の位置を誤って検出してしまうことを防止する。
【解決手段】 表示領域検出装置は、予め定める複数種類の表示パターンを平面表示パネルにそれぞれ表示させる表示パターン指定部と、各表示パターンを表示させたときの平面表示パネルを撮像した画像の画像データを取得する撮像画像取得部と、撮像画像取得部によって取得された画像データと該画像データに対応する表示パターンとに基づいて、表示領域の端部の位置の座標を推定する端部位置座標推定部と、端部位置座標推定部によって表示パターンごとに個別に推定された各座標を比較して、表示領域の端部の位置の座標を決定する端部位置座標決定部とを含む。
(もっと読む)
光ファイバ構造物変位計測装置及びその計測方法
【課題】光ファイバの設置毎に、事前に試験を行う必要がなく、不均一なひずみを有する変位であっても、正確に変位を計測することができる光ファイバ構造物変位計測装置及びその計測方法を提供する。
【解決手段】構造物20は、非直線形状であり、かつ変位が発生した場合に不均一なひずみが発生する構造物である。構造物20に固定された光ファイバ1に発生するブリルアン散乱光を検出して、ブリルアン散乱光から観測パワースペクトルデータを計測する。一方、構造物の変位の大きさに対応して発生するブリルアン散乱光のモデルパワースペクトル形状を理論的に算出し、このモデルパワースペクトル形状を観測パワースペクトルデータにあてはめる。あてはめられた最も適合する曲線形状のモデルパワースペクトル形状に基づき、構造物の変位を算出する。
(もっと読む)
エンコーダ装置、光学装置、露光装置、露光方法およびデバイス製造方法
【課題】小型であり、且つ回折格子で反射回折された回折光の光量の利用効率が従来よりも高いエンコーダ装置を提供する。
【解決手段】エンコーダヘッド20は、光源部から照明光がスケール5(回折格子)に照射されてスケール5で反射回折された+1次回折光を反射させて当該+1次回折光の回折角と等しい角度で再びスケール5に入射させる第1コーナーキューブ21と、スケール5で反射回折された−1次回折光を反射させて当該−1次回折光の回折角と等しい角度で再びスケール5に入射させる第2コーナーキューブ23とを有して構成される。
(もっと読む)
光センサー
【課題】光センサーの光学系において光源光の使用波長が変動しても、1/4波長板が確実に直線偏光を円偏光に変換して、良好なセンサー感度を確保維持する。
【解決手段】振動検出用光センサー1は光源2、偏光ビームスプリッター3、対物レンズ4、波長板ユニット5及び二次元イメージセンサー6,14を備える。波長板ユニットは、構造性複屈折を利用した1/4波長板7と、反射面を有する振動板8との一体構造からなる。二次元イメージセンサーは受光面6a,14aに同心で異なる半径の円形ビームスポット形状が振動板の反射面8aの位置に対応して入射し、その出力信号からビームスポット形状の面積又は半径を測定して振動板の位置又は変位量を検出する。
(もっと読む)
光センサー
【課題】光センサーの光学系において、1/4波長板が高温、高熱の使用条件下でも安定して確実に直線偏光を円偏光に変換でき、良好なセンサー感度、高いセンサー精度を確保維持する。
【解決手段】振動検出用光センサー1は、直線偏光のレーザー光を出力する光源2、偏光ビームスプリッター3、対物レンズ4、波長板ユニット5、及び振動板8からの反射光を検出する光検出器6を備える。波長板ユニットは、1/4波長板7と振動板とが一体化されている。1/4波長板は、一方の主面に一方向に周期的な凹凸形状9aを有する透明基板9と、透明基板と同じ周期的な凹凸形状を有しかつ屈折率の異なる2種類の誘電体薄膜10a,10bを交互に積層した光学多層膜である周期構造体10とからなるフォトニック結晶構造の波長板である。
(もっと読む)
センサヘッド、および光学式センサ
【課題】センサヘッドに起こった環境状態の異常を検知することができる光学式センサを実現する。
【解決手段】本発明に係る光学式圧力センサ1のセンサヘッド2は、光源5から発せられた光を伝送する出射用光ファイバ10と、出射用光ファイバ10の端面に対する相対位置が圧力に応じて変位し、出射用光ファイバ10の端面から出射された光を反射する反射板15と、反射板15が反射した光が入射される端面を有し、入射した光をそれぞれ第1および第2光検出器6・7に伝送する第1受光用光ファイバ11および第2受光用光ファイバ12とを備え、さらに、センサヘッド2内の湿度の変化に応じて、出射用光ファイバ10の伝送損失を変化させる損失変化部16を備える。
(もっと読む)
電線の異常検出方法、異常検出装置、および異常検出プログラム
【課題】例えば自走式電線点検装置を使用したビデオ映像に適した処理を行う。
【解決手段】撚られた複数の素線が表面に露出している電線に沿って撮像手段を移動させながら撮影した電線の複数の連続画像に基づいて電線の異常を検出する異常検出方法において、複数の連続画像4のうち、1枚の基準画像中の基準となる素線境界の位置情報及び素線の幅情報の入力を受け付け記憶する初期値設定処理(ステップS43)と、連続画像の各々について素線の境界を検出して素線表面画像を切り出す画像切り出し処理(ステップS44,S45)と、素線表面画像中の素線の表面の明るさの変化に基づいて素線の異常を検出する異常検出処理(ステップS46〜S48)を備えている。
(もっと読む)
像面位置計測方法、露光方法、及びデバイス製造方法
【課題】投影光学系の像面位置を精度高く計測すること。
【解決手段】基板の露光量をラインパターンのレジスト像が解像する露光量以上になる大きさ、換言すれば、ラインパターンのレジスト像のコントラスト値が所定値以上になる大きさに制御する。また、フォーカス位置を変化させた際にパターン倒れが発生しない大きさ以上の線幅を有するラインパターンを使用してベストフォーカス位置を算出する。これにより、デフォーカスによってパターン倒れが発生することを抑制しつつ、算出されるベストフォーカス位置の露光量依存性を無視することができるので、投影光学系の像面位置を精度高く計測することができる。
(もっと読む)
部品はんだ付け検査装置及びその検査方法
【課題】 表面実装部品がはんだ付けされた基板上をレーザ変位計で走査することによりはんだ付けされた表面実装部品の高さを効率良く高精度で測定し、虚報率を抑えながら表面実装部品の電極のはんだ付けを精度良く良否判定する。
【解決手段】 レーザ計測手段で計測された基板表面にはんだ付けされた個々の表面実装部品の変位量の最小高さと最大高さと、あらかじめ指定してデータベースに格納した前記表面実装部品の高さ範囲とはんだ材の厚み範囲とを照合し、前記表面実装部品のはんだ付け状態を論理判定する。
(もっと読む)
光学式計測装置及びその干渉計用プリズム。
【課題】ゴーストのない高精度な光干渉観測を可能にする。
【解決手段】第1の台形プリズム131、第1の直角プリズム132、第2の直角プリズム133、第3の直角プリズム134、第2の台形プリズム135、第4の直角プリズム136を貼り合わせて一体化した構造のプリズムユニットを用いる。上記第1の台形プリズムの互いに平行な二つの面の一方の面にビームスプリッタ膜が形成され、上記ビームスプリッタ膜を挟んで上記面が上記第1の直角プリズムの斜面に貼り合わされ、上記第2の台形プリズムの互いに平行な二つの面の一方の面にビームスプリッタ膜が形成され、上記ビームスプリッタ膜を挟んで上記面が上記第4の直角プリズムの斜面に貼り合わされている。また、上記第2の直角プリズム及び第3の直角プリズムは、各斜面の一方の面に偏光ビームスプリッタ膜が形成され、上記偏光ビームスプリッタ膜を挟んで各斜面が貼り合わされている。
(もっと読む)
光干渉測長装置
【課題】位置決め装置を初期化する際に、短時間で移動体の絶対位置測定が可能であり、なおかつ長時間に渡り安定した移動体の移動量測定が可能な光干渉測長装置を提供する。
【解決手段】移動体であるスライダ10の移動量を測定する光干渉測長装置は、光を測定光と参照光に分離し、測定光を、スライダ10に設置された測定ミラー9によって反射させ、参照光を参照ミラー8によって反射させる。測定ミラー9による測定光路の屈折率を、チャンバー2の内部の気圧を増減させることによって変化させ、屈折率の変化による干渉計の測長値の変化から、スライダ10の絶対位置を測定する。
(もっと読む)
エンコーダ装置、光学装置、露光装置、露光方法およびデバイス製造方法
【課題】小型であり、かつ構成部材の位置合せが容易なエンコーダ装置を提供する。
【解決手段】エンコーダヘッド20は、光源部からの計測光をスケール5(回折格子)に向けて反射させる第1プリズム21と、第1プリズム21により反射された計測光を二つの直線偏光に分割する偏光ビームスプリッタ膜22と、偏光ビームスプリッタ膜22を透過した直線偏光を円偏光に変換してスケール5上の一方の位置に照射させる第1波長板23と、偏光ビームスプリッタ膜22で反射した直線偏光を円偏光に変換してスケール5上の他方の位置に照射させる第2波長板24と、スケール5で反射回折した±1次回折光を干渉させて光検出器に向けて反射させる第2プリズム25とを有し、偏光ビームスプリッタ膜22が第1プリズム21と第2プリズム25に挟まれて設けられ第1プリズム21、第2プリズム25および偏光ビームスプリッタ膜22が一体に形成されていることを特徴とする。
(もっと読む)
UO鋼管溶接部ビード位置検出装置及び検出方法
【課題】UO鋼管の溶接部ビード位置を、安価で、精度よく検出することが可能なUO鋼管溶接部ビード位置検出装置を提供する。
【解決手段】UO鋼管1の軸線直下に配置されたタッチローラ6を当該UO鋼管1の外周面に当接した状態で、ターニングロール3によってUO鋼管1を周方向に回転させると、UO鋼管1の溶接部ビード2がタッチローラ6を乗り越える前後で2個1対のレーザ式変位計9の出力が変化するため、それらのレーザ式変位計9の出力変化から溶接部ビード2の入側と出側の位置を求め、その中間を溶接部ビード2の位置として算出することができる。その際、2個のレーザ式変位計9の出力を加算することにより、回転中のUO鋼管1の水平方向への振動に伴う各レーザ式変位計9の出力変動を相殺することができるので、小さな溶接部ビード2も正確に検出することが可能となる。
(もっと読む)
移動体制御システム、プログラム、及び移動体制御方法
【課題】複数の撮像部が撮像したそれぞれの画像に基づいて移動体を制御する移動体制御システムにおいて、それぞれの撮像部に対して定められたそれぞれの撮像座標系の対応関係の精度を向上させる。
【解決手段】第1回転中心位置特定部62がそれぞれの第1画像に含まれるそれぞれの第1基準目印に基づいて、第1撮像座標系における第1点に対応する第1回転中心位置を特定する。第2回転中心位置特定部64がそれぞれの第2画像に含まれるそれぞれの第2基準目印に基づいて、第2撮像座標系における第1点に対応する第2回転中心位置を特定する。座標系対応関係保持部66が第1回転中心位置及び第2回転中心位置に基づく第1撮像座標系及び第2撮像座標系の対応関係を示す座標系対応関係を保持する。
(もっと読む)
変位検出装置
【課題】被測定面の面粗度、汚れ、微細なゴミ等の付着によって被測定面の変位量の測定に誤差が生じる可能性を減少させる変位検出装置を提供する。
【解決手段】変位検出装置1では、対物レンズ3が光源2からの出射光を被測定面101に向けて集光する。被測定面101からの反射光の光路は、分離光学系4により光源2から出射光の光路と分離される。分離光学系4を通った反射光は、集光手段7により集光され、非点収差発生手段8により非点収差が発生した状態で受光部9に入射する。位置情報生成部10は、受光部9で検出した光量から得られるフォーカスエラー信号を用いて被測定面101の位置情報を生成する。そして、集光手段7、非点収差発生手段8又は受光部9は、対物レンズ3により集光された出射光の焦点が被測定面101の奥側に位置するときに、フォーカスエラー信号の値が0になるように光軸上の位置が設定されている。
(もっと読む)
ワーク識別装置
【課題】 コンベアに投入される多品種のワークを誤りなく識別するための識別装置及び識別方法の提供。
【解決手段】 本発明の識別装置は、ワーク(4A)の表面までの距離を計測する計測装置(8A)と、その計測装置(8A)をワーク(4A)の長手方向に移動させる移動装置(10A)と、これらを制御する制御装置(14A)とを有しており、前記ワーク(4A)には所定領域に種類を判別するため浮き出し文字(22A)が印字されており、前記制御装置(14A)は、計測装置(8A)を移動装置(10A)により移動させながらワーク(4A)表面までの距離を計測し、計測装置(8A)で計測されたワーク(4A)の所定領域における浮き出し文字(22A)による隆起の有無とその位置及び形状を特定し仕様の照合を行って種類・仕様の判断をする制御機能を有する。
(もっと読む)
露光方法、露光装置、露光システム及びデバイス製造方法
【課題】転写条件の調整を高精度に行うことができるとともに高スループット化を可能とすること。
【解決手段】基板に第一パターン、第二パターン及び第三パターンを重ねて転写する露光方法であって、基板に第一パターンを所定の転写条件で転写する第一転写ステップと、転写された第一パターンのパターン情報を計測する第一計測ステップと、第一パターンのパターン情報に関する第一計測結果に基づいて転写条件を調整する第一調整ステップと、調整された転写条件で基板に第二パターンを転写する第二転写ステップと、転写された第二パターンのパターン情報を計測する第一計測ステップと、第二パターンのパターン情報に関する第二計測結果と、第一計測結果とに基づいて転写条件を調整する第二調整ステップと、調整された転写条件で基板に第三パターンを転写する第三転写ステップとを含む。
(もっと読む)
位置検出装置
【課題】 2次以上の回折光および迷光の発生を抑え、位置検出信号のS/N比を改善し検出精度の向上を図る。
【解決手段】 屈折率nの保護層12で格子面11aが覆われた回折格子11のピッチをd、照射される可干渉光の真空中の波長をλ0とした時、d<2λ0/n とし、上記回折格子11への可干渉光の入射角θ0を
|sinθ0|<(2λ0/dn)−1
なる式を満たす角度に設定し、1次回折光を位置検出に使用する。
(もっと読む)
車輪形状計測装置、車輪形状計測方法、および車輪形状計測プログラム
【課題】車輪の形状に関する所定の計測項目を、車輪に非接触で正確に計測する。
【解決手段】通過センサ11a,11b等が車輪10a,10bの通過を検出すると、踏面外側レーザ光照射部13a,13bが所定時間オン動作し、レーザ光受信部14a,14bがその反射光を受信し、踏面外側レーザ光照射部13a,13bからのレーザ絞の仰角ηの延長線上に車輪10a,10bの径中心が位置したと判断した場合、踏面外側カメラ15a,15bおよび踏面内側カメラ16a,17b等は動作してシャッタを下ろし撮影する。画像処理部18は、踏面外側カメラ15a,15bが撮影した車輪10a,10bの踏面外側画像と、踏面内側カメラ17a,17bが撮影した踏面内側画像とを入力して合成画像を生成し、車輪形状計測部19がその合成画像に基づいて車輪に関する所定の計測項目を計測する。
(もっと読む)
101 - 120 / 834
[ Back to top ]