
Fターム[2F065AA03]の内容
光学的手段による測長装置 (194,290) | 測定内容 (27,691) | 位置;移動量 (12,734) | 2次元 (1,806)
Fターム[2F065AA03]に分類される特許
41 - 60 / 1,806
移動体駆動方法及び移動体駆動システム、パターン形成方法及び装置、露光方法及び装置、並びにデバイス製造方法
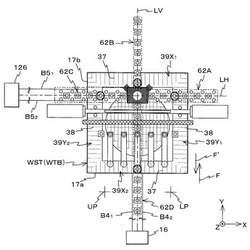
【課題】 エンコーダで位置を計測しつつ、移動体を所望の方向へ精度良く駆動する。
【解決手段】 駆動装置により、ウエハステージWSTのY軸方向の位置情報を計測するエンコーダ62Aの計測値とそのエンコーダによって計測されるスケール39Y1の平面度に関する情報とに基づいて、ウエハステージWSTがY軸方向に駆動される。この場合、駆動装置は、そのエンコーダの計測値に含まれるスケールの平面度に起因する計測誤差をスケールの平面度に関する情報に基づいて補正した補正後の計測値に基づいて、ウエハステージを所定方向に駆動することが可能である。従って、スケールの凹凸に影響を受けることなく、エンコーダを用いてウエハステージを精度良く所定方向に駆動することが可能となる。
(もっと読む)
薄膜製造装置のアライメント調整方法、薄膜製造装置、該薄膜製造装置により製造した電気機械変換膜、電気機械変換素子、液滴吐出ヘッド及び液滴吐出装置

【課題】低コスト化を図れる導膜製造装置、製造した電気機械変換素子、液滴吐出装置を提供する。
【解決手段】第1のアライメント調整工程では着弾位置251をカメラ205で捕捉し着弾位置251がカメラ205の撮影撮影基準位置252に一致するように基板又は液滴吐出ヘッド201を相対的に移動する。第2のアライメント調整工程ではレーザレッドによってレーザ光を照射して照射跡を形成し照射跡をカメラ205で捕捉し照射跡がカメラ205の撮影撮影基準位置252に一致するように基板又はレーザヘッドを相対的に移動する。第3のアライメント調整工程では基板上に予め形成されているアライメントマークを撮像手段205で撮影したアライメントマークの形状に基づいて基板の向きを検知して基板の向きの調整を行いアライメントマークを撮像手段205の撮影基準位置に一致するように基板を移動することで基板の組付け位置の調整を行う。
(もっと読む)
パターンの描画条件導出方法及びパターン描画装置
【課題】パターンのムラ欠陥の生じない描画条件を導出し、製品の歩留まりを向上する。
【解決手段】基板上に描画するパターンのムラ欠陥が発生しない描画条件を導出する方法であって、基板上に形成するパターンを生成するパターン情報生成工程S1と、パターンに対して、複数の描画項目の組み合わせによる、2通り以上の描画条件を設定する描画条件設定工程S2と、前記生成されたパターンを抜き取り、補助基板上に、前記各描画条件のもとに、矩形領域をなす補助パターンを形成する補助パターン描画工程S3と、補助基板に対して照明光を入射し、補助パターンから生じる回折光を光電変換素子にて画像として取得し、ムラ欠陥に関するムラ評価値とムラ発生周期とを求めことにより、複数の描画条件の中からムラ欠陥が生じない描画条件を導出する描画条件判定工程S4とを含むパターンの描画条件導出方法である。
(もっと読む)
レーザースキャンセンサ
【課題】通常姿勢の人間に対する検知性能を維持しつつ、さらに、小動物などの誤検知防止と匍匐侵入などをする人間の確実な検知との両立をも実現可能なレーザースキャンセンサを提供する。
【解決手段】レーザー距離計110と、スキャン機構120と、距離データ取得部130と、メモリ160と、取得された距離情報の中から人体に対応する可能性がある物体を検知するとともに、その物体の高さおよび幅をメモリ160に記憶されている設置状態情報にも基づいて算出し、算出された物体高さが所定高さ以上の場合はその物体の検知が第1所定時間以上継続したときに人体であると判定するとともに、算出された前記物体高さが前記所定高さ未満の場合はその物体の検知が前記第1所定時間よりも長い第2所定時間以上継続したときに人体であると判定する人体判定部140と、警告出力制御部150とを備える。
(もっと読む)
描画装置
【課題】シリコンなどのウエハー上にレーザー光を用いて露光することで描画を行う描画装置において、ナノミクロンオーダーの高精度な位置決めを行うこと。
【解決手段】レーザー光を一定方向に往復させて所定の間隔でドットパターンの描画を行う光学素子用の描画装置であって、レーザー光を照射する照明光学系と、
基盤を載置するXYステージと前記照明光学系と前記XYステージとの相対位置を測定する前記XYステージ上に設置されたナノスケールと、前記基盤上の描画信号の基準位置とその描画信号波形データ出力と、前記ナノスケールによって測定された往路のドットパターンの描画終了位置から、復路のドットパターンの描画開始位置を抽出する軸制御ユニットと、前記軸制御ユニットによって抽出された描画開始位置から描画を開始するように前記照明光学系の位置を補正する位置補正手段と、を備える。
(もっと読む)
点状対象物の3次元位置決め用の顕微鏡装置および顕微鏡法
【課題】点状対象物の3次元位置決め用の顕微鏡装置と顕微鏡法を提供する。
【解決手段】顕微鏡装置には、点状対象物を、焦点配光40、40’の形態で2つの別個の画像空間に結像する2つの結像光学系26、26’と、且つそれぞれの画像空間で配置された検出面27、27’の検出点にて、分析可能な光点を捕捉する2つの検出ユニット28、28’と、2つの検出面27、27’の検出点を相互にペアで対応させ、且つ2つの光点を分析することによって点状対象物の横方向x−y位置および軸方向z位置を確認する評価ユニットと、が含まれる。2つの結像光学系には、それぞれの検出ユニットの検出面に垂直な検出軸に対して、それぞれの焦点配光を斜めに向ける光学手段が含まれる。2つの焦点配光の傾斜が相互に反対であることにより、点状対象物のz位置の変化に応じて2つの光点が、反対方向にシフトする。
(もっと読む)
データ解析装置、データ解析方法、及びプログラム
【課題】地物表面の三次元形状を表す点群データに基づいて地物の壁面を自動的に検出する。
【解決手段】部分空間設定手段20は解析の対象空間を垂直面で分割して、柱状の複数の部分空間を設定する。部分空間選択手段22は部分空間のうち予め設定した閾値以上の高低差を有する点群を含むものを注目部分空間として選択する。ブロック空間設定手段24は注目部分空間を水平面で分割して、縦に積み重なる複数のブロック空間を設定する。水平面内探索手段26はブロック空間ごとに、水平面内の線分のうち、水平面に射影された点群が予め設定した基準以上に近傍に集まるものを探索して水平面内における壁面の位置と定める。
(もっと読む)
厚さ測定装置
【課題】貼合わせウェハ全体について厚さを測定できる装置の提供。
【解決手段】貼合わせウェハ1の厚さ測定光学系及び観察光学系と、測定光学系から出力される信号を用いて貼合わせウェハ1の厚さを算出する信号処理装置とを具え、測定光学系は、第1の波長域の測定用光源30と、この測定光を投射して光スポットを形成する対物レンズ17と、その反射光の光検出手段40とを有し、観察光学系は、前記第1の波長域とは異なる第2の波長域の観察用照明光を放出する照明光源41と、照明光を投射する対物レンズ17と、その反射光を受光して2次元画像を撮像する撮像装置48とを有する。これらで共通の対物レンズ17と測定光源及び観察光源との間の光路中には、前記測定光学系と観察光学系とを光学的に結合する波長選択性を有するカップリング素子34を配置する。撮像装置48は、前記測定光により形成された光スポットの像が重畳された像を撮像する。
(もっと読む)
光学式位置検出装置、位置検出システムおよび入力機能付き表示システム
【課題】検出光の進行方向および検出光の進行方向に交差する方向の双方における検出範囲を拡張することのできる光学式位置検出装置、位置検出システム、および入力機能付き表示システムを提供すること。
【解決手段】位置検出システム1において、光源部12は、検出光L2を放射状に出射するとともに、検出光L2の放射角度範囲において一方側から他方側に向かって強度が変化する光強度分布を形成し、受光部13は、光強度分布が形成された検出対象空間10Rに位置する対象物体Obで反射した検出光L2を受光する。光源はレーザー光源14であり、レーザー光源14から出射されたレーザー光(検出光L2)を可動ミラー11によって走査する。
(もっと読む)
画像処理装置およびその制御方法
【課題】 複数の視点から撮像した画像に基づいて、より広範囲における任意の被写体の位置情報を取得する。
【解決手段】 上記課題を解決するために、本発明の画像処理装置は、第一の画像と、前記第一の画像とは異なる視点から撮像した第二の画像とを取得する取得手段と、前記第一の画像および前記第二の画像それぞれにおける被写体の特徴点を検出する検出手段と、前記第一の画像および前記第二の画像に基づいて、前記被写体の位置情報を算出する算出手段とを有し、 前記算出手段は、前記第一の画像および前記第二の画像の両方において前記特徴点が検出された場合、前記特徴点それぞれに基づいて、前記位置情報および前記被写体に対応する被写体モデルを算出し、前記第一の画像および前記第二の画像のいずれかのみにおいて前記特徴点が検出された場合は、前記被写体モデルを参照して、前記情報を算出することを特徴とする。
(もっと読む)
膜厚測定装置及び膜厚測定方法
【課題】被測定対象に施される遮熱コーティングの膜厚を効率良く正確に測定することが可能な膜厚測定装置及び膜厚測定方法を提供することを目的とする。
【解決手段】膜厚測定装置1は、タービン翼11に形成された遮熱コーティング膜の膜厚を測定するECTセンサ4と、遮熱コーティング膜の膜厚を測定する地点であるタービン翼11上の測定地点を記憶している記憶手段9と、タービン翼11の形状を測定するレーザ変位計5と、レーザ変位計5によって測定された測定されたタービン翼11の形状と、記憶手段9に記憶されているタービン翼11上の測定地点に基づいて、ECTセンサ4による実際の膜厚測定に適した実測定地点を算出する測定位置算出手段8と、測定位置算出手段8によって算出された実測定地点に基づいて、ECTセンサ4を駆動して、ECTセンサ4の測定位置を調整するアーム駆動手段6とを備える。
(もっと読む)
転写方法および転写装置
【課題】原板が有する凹凸パターンを容易にかつ高い位置精度で基板上の転写液層にインプリントすることのできる技術を提供する。
【解決手段】原板Mの凹凸パターンP面が基板S上に塗布された転写液層UVRに接触した状態で、原板Mおよび基板Sのそれぞれに形成されたアライメントマークALを、1つの認識手段により、両アライメントマークALが重なる方向から同時に撮像して得られた1つの画像から両アライメントマークALの位置を別々に認識処理することで原板Mと基板Sとのアライメントを行う。そのため、撮像された原板Mおよび基板Sのアライメントマーク画像に相対的な位置誤差が生じるおそれがなく、振動や異なる走査タイミングに起因する位置誤差が生じることを防止できる。
(もっと読む)
指示位置表示装置および指示位置表示システム
【課題】レーザー光の照射位置の制御や照射位置の制御にかかる装置レイアウトの自由度を向上する。
【解決手段】カメラ10と、レーザーポインタ20が照射するレーザー光の照射位置を含む範囲をカメラ40が撮像するようにレーザーポインタ20とカメラ40とを載置され、レーザーポインタ20とカメラ40とを一緒に回動させるポインタマニピュレータ30と、ポインタマニピュレータの回動を制御する制御装置50と、を備え、制御装置50は、カメラ40が撮像する画像P2とカメラ10が撮像する画像P1とを取得し、画像P2内における画像P1の位置を特徴点マッチングにより特定し、画像P1と画像P2と前記位置とに基づいて、ポインタマニピュレータ30の回動を制御する。
(もっと読む)
動きを検出するシステム、リソグラフィ装置、およびデバイス製造方法
【課題】誤差の影響を受けにくいが大きな空間を占有しない、改善された精密測定システムを提供する。
【解決手段】本体の動きを検出するシステムであって、本体と、基準フレームに対して実質的に静止して取り付けられた第1回折格子40,42と、本体に取り付けられた第2回折格子50,52と、第1および第2回折格子で回折された一つ以上の放射ビームを受け取り、基準フレームに対する本体の動きを検出するように構成された検出器60,61,62,63と、を備え、検出器60,61,62,63が本体に結合され、本体に対して移動可能である。
(もっと読む)
車両運転支援装置、道路の路肩を検出する方法および該方法に基づく車両運転支援方法
【課題】本発明は、実際の道路環境において、反射光(楕円偏光)の楕円軸が車両の車軸方向あるいは高さ方向に対して傾いている場合であっても、正確に路肩を検出することができる新規な車両運転支援装置を提供することを目的とする。
【解決手段】偏光撮像手段の画素毎に直交する2つの偏光方向をもつ偏光素子を設け、該偏光素子の偏光検出軸を所定の角度範囲で変更させながら、2つの偏光方向に対応する光強度の比を監視し、当該光強度比が最初の極値に達したときの光強度に基づいて偏光状態特徴量を算出する。この偏光状態特徴量が所定の閾値を超える領域を路肩として検出し、その位置情報に基づいて、操舵制御手段、走行速度制御手段、警告手段等を制御することによって車両の運転支援を行う。
(もっと読む)
トロリ線データ比較装置
【課題】過去のトロリ線データと現在のトロリ線データとで走行位置を正確に一致させることを可能としたトロリ線データ比較装置を提供する。
【解決手段】車両の屋根上に配置されて鉛直上方のトロリ線を撮影するラインセンサカメラ2と、ラインセンサカメラ2から入力される映像信号を収録する画像録画部と、画像録画部から現在のトロリ線画像を入力するラインセンサ画像入力部5a、現在のトロリ線画像からトロリ線の摩耗及び偏位を抽出する摩耗・偏位抽出部5b、過去のトロリ線画像と現在のトロリ線画像とから車両の偏位の位置ずれ量を検出する偏位位置ずれ検出部5c、及び位置ずれ量を現在のトロリ線画像に反映し、過去のトロリ線画像と比較する摩耗量比較部5dを備える画像処理部とから構成した。
(もっと読む)
情報処理システム及び情報処理方法
【課題】ユーザにとっての利便性により優れた情報処理装置及び情報処理方法を提供すること。
【解決手段】本技術に係る第1の側面である情報処理システムは、1つの検体を同一方向に切断することによって得られた複数の切片が離散的に載置されたスライドを撮影して得た画像データを取得する取得部と、前記取得された画像データにおける個々の前記切片を含む同一形状の複数の検体領域を検出して、個々の前記検体領域それぞれの前記画像データの座標空間における位置を相対的に示す位置情報を算出する検出部と、前記算出された位置情報を記憶する第1の記憶部と、前記記憶された位置情報をもとに前記検体領域間での表示の切り替えを行う制御部とを具備する。
(もっと読む)
ネイルプリント装置及び印刷制御方法
【課題】複数回印刷ヘッドを走査して爪部に印刷を施す場合に、n回目の走査終了後n+1回目の走査までの間に指が動いてしまった場合でも、走査ごとの画像のずれを防いで高品質の印刷を行うことのできるネイルプリント装置及び印刷制御方法を提供する。
【解決手段】爪部Tを複数の領域に分けて複数回の走査により1つのデザイン画像を印刷する場合に、各回の走査開始前(S3)に爪部Tの位置情報を取得する(S2)とともに、n+1回目の走査を開始する前に、n回目の走査開始前の爪部Tの位置情報とn+1回目の走査開始前の爪部Tの位置情報とを比較して(S8)爪部Tの位置変化を検出して(S9)、n+1回目の走査開始前に爪部Tの位置変化が検出されたときは、爪部Tの位置変化に応じて、n+1回目の走査を行う際の印刷開始位置を補正し(S10)、この補正後の印刷開始位置から、次の印刷を開始するように印刷制御する(S9)。
(もっと読む)
転写方法および転写装置
【課題】原板が有する凹凸パターンを容易にかつ高い位置精度で基板上の転写液層にインプリントすることのできる技術を提供する。
【解決手段】原板Mの凹凸パターンP面が基板S上に塗布された転写液層に接触した状態で、原板Mおよび基板のそれぞれに形成されたアライメントマークを、1つの認識手段3により、両アライメントマークが重なる方向から、一方のアライメントマークを撮像した後、他方のアライメントマークを撮像し、得られた両アライメントマークの画像にそれぞれ位置誤差補正処理を行う。そのため、補正後の両アライメントマーク画像を用いて高精度なアライメントを行うことが可能になる。
(もっと読む)
校正原器、形状計測装置、横座標校正方法及び光学素子の製造方法
【課題】汎用性の高い校正原器を提供し、一つの校正原器で種々の形状計測装置の横座標の校正を可能にする。
【解決手段】形状計測装置の横座標を校正する際にワークの代わりに配置される校正原器20に、入射角度に係わらず光を元来た方向に反射する再帰性光学素子21を設け、この再帰性光学素子21によって測定光Lmを反射させる。校正原器20は、再帰性光学素子21によって反射するため、種々の曲率半径の測定光を元来た方向に反射することができ、これによって、種々の形状計測装置の横座標の校正に使用することができる。
(もっと読む)
41 - 60 / 1,806
[ Back to top ]