
Fターム[2F065BB01]の内容
光学的手段による測長装置 (194,290) | 対象物−形態;性質 (11,481) | 平面平板(長手方向を特定できない) (2,611)
Fターム[2F065BB01]の下位に属するFターム
パターン有(プリント基板、フォトマスク) (1,360)
円盤(磁気ディスク、半導体ウエハ等) (357)
Fターム[2F065BB01]に分類される特許
141 - 160 / 894
形状測定装置、形状測定方法
【課題】半導体ウェーハ等の薄片試料のエッジプロファイルの測定に適した形状測定装置及びその方法を提供する。
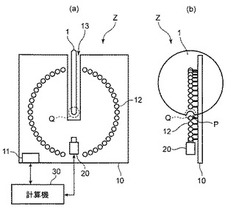
【解決手段】LED駆動回路11により、一の平面内の複数の位置各々に配置された複数のLED12を順次切り替えて点滅させることにより、ウェーハ1の端面であり、鏡面あるいは光沢のある面である測定部位Pに対し、順次異なる照射角度で光を照射し、その照射ごとに、計算機30により、測定部位Pからの反射光の輝度分布を表す画像データを、カメラ20を通じて取得し、さらに、計算機30により、各LED12に対応した画像データと光の照射角度とに基づいて、反射光の輝度がピークとなるときの光の照射角度を推定することにより、測定部位Pの表面角度の分布及びエッジプロファイルを演算する。
(もっと読む)
機械的精度評価方法

【課題】その目的は加工機の大きさに係らず、加工ツールと加工ポイント間の相対的な変位を正確に計測することが可能な機械的精度測定方法を提供することにある。
【解決手段】加工機に取付けたカメラで真直度などの精度を測定したい部位、例えば当該加工機の加工テーブルや当該加工機の加工テーブル上に設置された被加工物の表面の画像データを撮影し、その画像データを基に当該部分の真直度や位置決め精度などの加工機の機械的精度を測定する方法。
(もっと読む)
測定物保持装置及び方法並びに平面度測定装置
【課題】測定物を保持する際に測定物が自重の撓みにより変形されることのない測定物保持装置を提供する。
【解決手段】測定物11の平面度測定に用いられる測定物保持装置20であって、測定物11が載置される載置面11aを有する載置台40と、載置台40に、載置面4002から突出して測定物11を下方から複数箇所で支持し載置面4002からの高さが変更可能に設けられた複数の測定物支持部材60と、各測定物支持部材60が測定物11に対して均一な接触圧力で接するように各測定物支持部材60の載置面4002からの高さを変更する制御手段80とを備える構成にした。
(もっと読む)
波面操作および改良3D測定方法および装置
【課題】光学システムにおいて、位相および振幅情報を含む波面分析、ならびに3D測定を実行する方法および装置、特に、光学システムの画像面のような、中間面の出力の分析に基づく方法および装置を提供する。
【解決手段】 薄膜コーティング、または多層構造の個々の層が存在する表面トポグラフィの測定について記載する。多重波長分析を、位相および振幅マッピングと組み合わせて利用する。マクスウェルの方程式の解に基づき、仮想波面伝搬を用いて、波面伝搬および再合焦によって位相および表面トポグラフィの測定を改良する方法について記載する。このような位相操作方法によって、または広帯域およびコヒーレント光源の組み合わせを利用する方法によって、光学撮像システムにおいてコヒーレント・ノイズの低減を達成する。本方法は、集積回路の分析に適用され、コントラストを高めることにより、または1回のショット撮像における3D撮像によってオーバーレイ測定技法を改善する。
(もっと読む)
板厚分布の測定方法
【課題】安価な2軸スライダーを用いて、高精度に(半)透明基板の板厚分布を測定する方法を提供する。
【解決手段】(半)透明基板の一方の面から光を入射し、表面と裏面の反射位置を検出して板厚を測定する変位センサ−を用いた板厚分布を測定する方法であって、変位センサーの周辺に少なくとも3個のセンサーを配置し、これらのセンサーは、変位センサーと(半)透明基板との位置関係を測定して、(半)透明基板に対する変位センサーの位置及び姿勢を一定に制御しながら(半)透明基板の板厚分布を測定する方法であり、半透明基板における測定においては、半透明基板に接した、液体層を介して板厚の測定を行う。
(もっと読む)
形状測定装置および形状測定方法
【課題】1種類の投影パターンを用いた簡便な方法で被検物の三次元形状を測定することができる形状測定装置を提供する。
【解決手段】形状測定装置1は、被検物5の一部の領域に縞パターンを投影するパターン投影部10と、被検物5に投影された縞パターンを撮像する撮像部20と、縞パターンの画像において、画像表面を通る所定の直線上での画像のコントラスト分布を算出し、そのコントラスト分布に基づいて前記所定の直線上におけるパターン投影領域の中心位置を算出し、前記所定の直線を画像表面に沿って移動させつつ前記中心位置の算出を行って取得した各々の前記中心位置に基づいて被検物5の断面形状を算出するコンピュータ40とを備えることを特徴とする。
(もっと読む)
外形判定装置
【課題】判定時間が短く、かつ、小形化や低コスト化が可能な外形判定装置を提供する。
【解決手段】被判定物を載置する矩形状の載置面3aを有する載置台3と、載置面3aの周縁に設置される、横方向送光用光導波路1Xと、横方向受光用光導波路2Xと、縦方向送光用光導波路1Yと、縦方向受光用光導波路2Yと、載置面3aから上方に起立する高さ方向送光用光導波路1Zと、高さ方向受光用光導波路2Zと、上記縦方向,横方向および高さ方向の送光用光導波路1X,1Y,1Zの送光用光コア22に接続された光源D1と、上記縦方向,横方向および高さ方向の受光用光導波路2X,2Y,2Zの受光用コア23に接続された光電変換素子C1と、この光電変換素子C1からの光遮断信号を受けて演算処理し被判定物の外形を算出する外形算出手段4とを備えている。
(もっと読む)
真空内処理装置
【課題】トップテーブルの小型化と、トップテーブル質量の軽量化を実現しつつ、かつ長尺の反射体を必要とせず真空試料室の小型化が可能な真空内処理装置ないし荷電粒子線装置を実現する。
【解決手段】測長に使用する一対の干渉計および反射体の両者が可動となるようステージを構成し、かつステージが持つ複数の移動軸のうち上記一対の干渉計および反射体によって測長が行われる方向とは交差する移動軸と平行な方向に対して、上記一対の干渉計および反射体が互いに対向する状態を保ったまま移動できるようにステージを構成する。
(もっと読む)
計測方法、露光方法及び露光装置、並びにデバイス製造方法
【課題】位置計測系の周期誤差が発生しても、精度良く周期パターンの位置を検出する。
【解決手段】可動ステージの位置を位置計測系を用いて計測し、その計測情報を用いて可動ステージを駆動するとともに、可動ステージ外の周期パターンから成る計測用マークを可動ステージに一部が配置された検出器を用いて検出する。ここで、位置計測系の計測周期(図10(B)及び10(C)に示される例では0.25μm)の自然数倍と異なるピッチ(図10(C)の例では2.03125μm(なお、図10(B)の例では2μm))の周期パターンを計測用マークとして用いることにより、計測周期に等しい位置計測系の周期誤差が発生しても、検出精度を損なうことなく、計測用マークの位置情報を計測することが可能となる。
(もっと読む)
検査装置
【課題】基板上の膜厚を測定可能な検査装置を提供する。
【解決手段】表面検査装置1は、表面に薄膜が設けられたウェハWを支持するステージ10と、ステージ10に支持されたウェハWの表面に照明光を照射する照明系20と、照明光が照射されたウェハWの表面からの光を検出する撮像装置35と、撮像装置35により検出された光の情報から薄膜の膜厚を測定する膜厚算出部50と、照明光の実際の波長を測定する画像処理部45とを備え、膜厚算出部50は、画像処理部45により測定された照明光の実際の波長を用いて、撮像装置35により検出された光の情報から膜厚を求める。
(もっと読む)
基板検査装置
検査精密度を向上させることのできる基板検査装置を提供する。基板検査装置は少なくとも一つの照明モジュール、結像レンズ、第1ビームスプリッタ、第1カメラ及び第2カメラを含む。照明モジュールは検査基板に光を提供し、結像レンズは検査基板から反射された光を透過させる。第1ビームスプリッタは結像レンズを透過した光のうち一部を透過させ残りを反射させる。第1カメラは第1ビームスプリッタを透過した光の印加を受けて撮像し、第2カメラは第1ビームスプリッタから反射された光の印加を受けて撮像する。このように、一つの結像レンズを用いて検査基板を検査することによって、従来の結像レンズ間の光軸または倍率偏差に起因した検査精密度の低下を防止することができる。 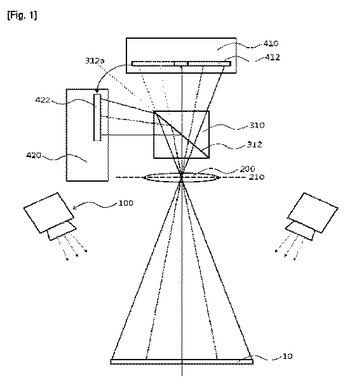 (もっと読む)
(もっと読む)
基板の破損及び移動中の基板のずれを動的に検出するセンサ
【課題】基板のずれ及び/又は破損を検出するのに必要なセンサの数を少なくし、比較的低コストで実施する。
【解決手段】移動中の基板106の少なくとも2つの平行な端部の長さに沿った、破損やずれ等の基板の欠陥の存在を検出する少なくとも2つのセンサ140A、140Bを組み込んだ装置及び方法を提供する。一実施形態において、装置は、基板の欠陥を検出するための、少なくとも2つの平行な端部近傍で、基板をセンシングするセンサ構成を含む。他の実施形態において、装置は、基板サポート表面を有するロボット114又は130と、基板の欠陥を検出するための、少なくとも2つの平行な端部近傍で、基板をセンシングするセンサ構成とを含む。
(もっと読む)
変位測定装置、ステージ装置、露光装置、スケール製造方法、及びデバイス製造方法
【課題】 物体の変位量を高精度に測定可能な変位測定装置を提供すること。
【解決手段】 本発明の一側面としての変位測定装置は、格子パターン6が形成されたスケール7と、スケール7に光を照射する光源と、スケール7の格子パターン6で回折された光を受光する受光素子と、を備える。格子パターン6の形状は、その格子パターン6の格子方向Yに一定の周期で変化している。受光素子は、格子パターン6上の、格子方向Yにその周期の自然数倍の長さを有する領域100で回折された光を受光する。
(もっと読む)
位置計測装置およびそれを用いた露光装置
【課題】 エンコーダシステムを用いた位置計測装置において、計測誤差による影響を低減させることを目的とする。
【解決手段】 対象物を搭載して移動可能な移動体と、前記移動体の位置を計測可能なエンコーダ型の第1の計測手段と、前記第1の計測手段による計測と同時に、前記移動体の位置を計測可能、あるいは前記対象物または前記移動体に形成されたマークの位置を検出可能な第2の計測手段と、前記第1および第2の計測手段の計測結果にもとづいて、前記第1の計測手段の計測誤差を算出し、該計測誤差にもとづいて前記第1の計測手段を補正する補正手段と、を備える。
(もっと読む)
光学式位置検出装置及び投射型表示装置
【課題】複数の検出対象物の位置をそれぞれ検出することのできる光学式位置検出装置を提供する。
【解決手段】本発明の光学式位置検出装置は、位置検出光L2を出射して基準面200Pに沿って変化する光強度分布を形成する光源140と、位置検出光に対する反射能を変更可能な反射部301と、反射部の反射能の変更態様を制御する反射能制御部302とをそれぞれ有し、反射部が相互に異なる反射選択期間ta〜tdにおいて位置検出光を反射する複数の前記検出対象物310〜340と、検出空間Sで検出対象物により反射された位置検出光を検出する光検出器410と、複数の反射選択期間にそれぞれ対応する検出選択期間Pa〜Pdにおける光検出器の光検出値に基づいて複数の検出対象物の位置をそれぞれ検出する位置検出部400と、を具備する。
(もっと読む)
変位測定装置、露光装置、及び精密加工機器
【課題】 高精度に物体の変位量を測定可能な変位測定装置を提供することを目的とすること。また、特にそれを具備した露光装置、及び精密加工機器を提供すること。
【解決手段】 変位測定装置200は、格子パターン4が形成されたスケール5と、スケール5に光を照射する光源1と、光源1からの複数の回折光のそれぞれを円偏光に変換する波長板6と、波長板6を透過した複数の回折光を重ね合わせて干渉させる光学素子7と、干渉させた光を受光する受光素子10とを備える。そして、波長板6に入射する複数の回折光が互いに偏光方向の等しい直線偏光になるように、光源1からの光を直線偏光に変換する直線偏光生成手段50を備える。
(もっと読む)
光学式位置検出装置及び投射型表示装置
【課題】検出対象物の位置の検出精度の低下を抑制する。
【解決手段】光学式位置検出装置は、物体表面の少なくとも一部で構成される基準面200Pの上方位置に設定された検出空間Sに配置される検出対象物300を光学的に検出するもので、位置検出光L2を出射して検出空間に基準面に沿った位置に応じて変化する光強度分布を形成する位置検出用光源と、検出空間の側方位置に配置され、検出空間で検出対象物により反射された位置検出光を検出する光検出器410と、光検出器の光検出値に基づいて前記検出対象物の位置を検出する位置検出部とを具備する。光検出器は、光検出面411aを備えた検出器本体411と、光検出面の検出空間の側において位置検出光の少なくとも一部を前記光検出面に対して遮光する遮光構造412とを有し、遮光構造は、基準面から出射し直接に光検出面に入射する位置検出光の少なくとも一部を光検出面に対して遮光する。
(もっと読む)
オブジェクト制御システム、オブジェクト制御方法、プログラム、及び回転中心位置特定装置
【課題】たとえ撮像部の設置位置がずれた場合でも、オブジェクトの目標位置への移動に時間が掛かることを抑制できるオブジェクト制御システムを提供する。
【解決手段】オブジェクト制御システムは、オブジェクトに対して予め定められた第1オブジェクト線を示す第1基準目印を含む第1画像を撮像する第1撮像部と、第1画像内の第1基準目印に基づいて、第1画像に対して予め定められた第1目標オブジェクト線と第1オブジェクト線との間の角度を示す第1差分角度を取得する角度取得部と、前記第1差分角度に基づいてオブジェクトを回転させる回転機構を制御するオブジェクト制御部とを備える。
(もっと読む)
直交度の計測方法
【課題】2つのミラーの間の直交度を迅速かつ高い精度で計測する。
【解決手段】第1ミラー541および第2ミラー540を有する物品における前記第1ミラー541の反射面と前記第2ミラー540の反射面との直交度を計測する計測方法に係り、前記計測方法は、前記第2ミラー540の反射面に対して直角にレーザ光LB1が入射するように前記レーザ光LB1の光軸を調整する調整ステップと、前記第1ミラー541の反射面に平行な方向に前記物品を既知の距離だけ移動させたときの、前記レーザ光LB1が入射するように前記第2ミラー540の反射面に配置されたコーナーキューブCC1によって反射された前記レーザ光LB1の光軸の変位量を検出する検出ステップと、前記距離と前記変位量とに基づいて前記第1ミラー541の反射面と前記第2ミラー540の反射面との間の角度が直角からずれている量を計算する計算ステップとを含む。
(もっと読む)
ロボットの把持装置
【課題】ロボットの組立作業において、ワークの把持動作を確実に行う。
【解決手段】把持部材2a、2bの間にワークWを把持する工程において、各把持部材2a、2bに設けられた接触押圧部21a、21bがワークWを押圧して把持することによって発生する光学縞を検出して、把持力の制御を行う。このとき、把持部材2aに設けられたワーク有無検出部22aがワークWに接触することによって発生する光学縞を検出することで、把持部材2a、2bの間にシート状のワークWが有ることを確認する。
(もっと読む)
141 - 160 / 894
[ Back to top ]