
Fターム[2F065FF31]の内容
光学的手段による測長装置 (194,290) | 測定方法 (22,691) | 時間測定 (457)
Fターム[2F065FF31]の下位に属するFターム
時間間隔測定 (179)
速度既知又は別途測定 (59)
速度未知 (10)
Fターム[2F065FF31]に分類される特許
1 - 20 / 209
横断歩道検出装置
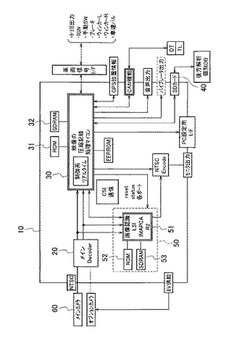
【課題】制御系の演算処理に対する負荷を軽減しつつ、車両と共に移動する車載のカメラによる撮影画像から精度良く横断歩道を検出すること。
【解決手段】車両に搭載したカメラ60からの撮影画像の画像認識領域の部分をマイコン30でエッジ処理し、エッジ処理した画像信号を画像認識LSI51で高速フーリエ逆変換して、強周期性を有するゼブラパターンを画像認識領域中から抽出する。抽出したゼブラパターンの周期性が横断歩道の周期性の範囲内であれば、そのゼブラパターンを横断歩道であるとマイコン30が認識する。
(もっと読む)
単眼カメラ画像によるステレオ視に基づく運動量推定方法、及び当該方法を使用する運動量推定装置

【課題】単眼ステレオ視に基づく運動量推定を実施するに当たり、演算負荷を軽減しつつ、運動量及び三次元座標を高精度に算出する方法を提供する。
【解決手段】単眼カメラによって撮像された画像を用いるステレオ視に基づく運動量推定を行うに当たり、個々のオプティカルフローの向きを考慮して、異なる向きを有するオプティカルフローを形成する特徴点を効率的にサンプリングして基礎行列の算出に用いる。具体的には、基礎行列の算出に用いるオプティカルフローを形成する特徴点のサンプリングにおいて、サンプリングされた特徴点をオプティカルフローの向きに基づいて所定数のグループに振り分け、複数の特徴点が振り分けられたグループについては特徴点を1つに収束させ、特徴点が振り分けられなかったグループについては改めて特徴点を選択する処理を繰り返して、全てのグループに特徴点が1個ずつ属する状態とし、これらの特徴点に基づいて基礎行列を算出する。
(もっと読む)
形状検査方法およびその装置
【課題】 複数の3次元形状計測法、表面計測手法を相補的に組み合わせることで、測定対象の形状によらず高い計測精度を確保した3次元形状検査方法およびその装置を提供することを目的とする。
【解決手段】 本発明は、検査対象の参照モデルの形状データである参照データを格納する格納部と、前記参照データから第1の形状データを取得する領域を特定する領域特定部と、前記領域特定部で特定した領域について前記第1の形状データを取得する第1の3次元形状センサと、前記領域特定部で特定した領域以外の領域について前記検査対象の前記第1の形状データとは異なる第2の形状データを取得する第2の3次元形状センサと、前記第1の形状データと前記第2の形状データとを統合する相補的統合部とを備えることを特徴とする3次元形状検査装置を提供する。
(もっと読む)
移動体及び移動面検出システム
【課題】照度の低い環境において、コントラストが低い移動面上を移動する移動体の位置及び姿勢、並びにその移動面の形状を検出する。
【解決手段】移動体及び移動面検出システム1は、移動体3と、移動体3上に配置された発光部4と、移動体3を俯瞰する位置に設けられたステレオカメラ5及び測距センサ6と、ステレオカメラ5及び測距センサ6の出力を処理する処理部7と、処理部7の出力を表示する表示部8とを備える。ステレオカメラ5は、発光部4のステレオ画像を撮像する。測距センサ6は、移動面に光を出射し、移動面で反射されて戻ってくる光の飛行時間に基づいて移動面を測距する。処理部7は、ステレオカメラ5が撮像したステレオ画像に基づいて移動体3の位置及び姿勢を検出するとともに、測距センサ6の出力に基づいて移動面の形状を検出し、移動体3の位置及び姿勢と、移動面の形状とを表示部8に表示する。
(もっと読む)
物体識別装置及び物体識別プログラム
【課題】検知対象物の一部が他の障害物によって隠れているような状況下でも、その検知対象物の形状を正確に識別することができるようにする。
【解決手段】検知対象物上の各点の法線を算出する法線算出処理部3と、検知対象物上の各点を通過する直線を生成する直線生成処理部4と、3次元空間内の一定範囲の区切りである格子の中で、直線生成処理部4により生成された直線が通過する格子を特定する通過格子特定処理部5と、通過格子特定処理部5により特定された格子に対する投票を行う投票処理部6とを設け、形状推定処理部7が、3次元空間内の各格子に対する投票処理部6の投票結果から検知対象物の形状を推定する。
(もっと読む)
レーザ計測用ターゲット治具及びレーザ計測システム
【課題】計測システム全体の小型化及び軽量化を図るとともに、配管の取付位置を正確に特定することができる、レーザ計測用ターゲット治具及びレーザ計測システムを提供する。
【解決手段】第一フランジ11に一端部2a及び中間部2bが固定される計測器用固定治具2と、第二フランジ12に固定されるレーザ計測用ターゲット治具3と、計測器用固定治具2の他端部2cに固定されるレーザ計測器4と、第一フランジ11及び第二フランジ12の位置を算出する演算手段5と、を備え、レーザ計測用ターゲット治具3は、第二フランジ12に配置される台座31と、レーザ光を反射可能な表面32aを有し台座31に表面の一部が突出するように固定された球体32と、台座31を第二フランジ12に固定する固定手段33と、を有する。
(もっと読む)
光学式曲がり測定装置
【課題】複数本の光ファイバーを設置し難い測定対象に対しても適用でき、測定対象の複数個所の特定方向の曲がり量を独立に測定し得る光学式曲がり測定装置を提供する。
【解決手段】光学式曲がり測定装置は、測定光を供給する光源ユニット110と、測定光を伝達する光ファイバー120と、光ファイバー120の異なる複数の部分に設けられた複数の光学特性変化部材150A,150B,150Cと、光ファイバー120から出力される光を検出する光検出ユニット140を備えている。各光学特性変化部材150A,150B,150Cは、これが設けられた光ファイバー120の部分の特定方向の曲がり量に応じてこれに入射した光に光学特性の変化を与える。光検出ユニット140は、光学特性の変化を受けた光を分離して検出し、その検出光強度に基づいて光ファイバー120の複数の部分の特定方向の曲がり量を独立に測定する。
(もっと読む)
パターン検査装置及びパターン検査方法
【目的】光量センサ出力と画像取得用のセンサ出力の応答速度のずれによる補正誤差を低減する。
【構成】パターン検査装置100は、光源103と、被検査試料にレーザ光を照明する照明光学系170と、レーザ光の光量を測定する光量センサ144と、パターンの光学画像を撮像するTDIセンサ105と、TDIセンサ105の出力タイミングが早い場合に、出力タイミングとの時間差分の期間、TDIセンサ105の出力データを一時的に記憶する記憶装置140と、光量センサ144の出力タイミングが早い場合に、出力タイミングとの時間差分の期間、光量センサ144の出力データを一時的に記憶する記憶装置142と、光学画像の階調値を時間差分ずらした時刻に出力された光量値を用いて補正する補正回路148と、比較対照となる参照画像を入力し、階調値が補正された光学画像と参照画像とを画素単位で比較する比較回路108と、を備えたことを特徴とする。
(もっと読む)
物体検出ユニット
【課題】物体の誤検出を抑えたい領域と、物体の見逃しを抑えたい領域とが、混在する検出空間に対して、領域毎に、その領域に合わせた物体の検出が行える物体検出ユニットを提供する。
【解決手段】発光部31を発光させて入出口の幅方向に検出波を照射し、受光部32で反射波を検出する。記憶部5、物体の仮検出に用いる受光部32の受光光量の下限を設定する仮検出レベル、および仮検出した物体の本検出に用いる受光部32の受光光量であって、仮検出した物体までの距離に応じて下限を設定する本検出レベルを記憶する。測距部3は、受光部32で検出した反射波の受光光量が、記憶部5に記憶している仮検出レベルを超えているときに、物体を仮検出するとともに、この仮検出した物体までの距離を算出する。制御部2は、本検出レベルを用いて、仮検出した物体が物体であるかどうかを判定する。
(もっと読む)
表面形状計測装置、及び表面形状計測方法
【課題】計測対象物の三次元形状を容易に、且つリアルタイムに得ることができる表面形状計測装置、及び表面形状計測方法を提供する。
【解決手段】道路8の表面にレーザビーム9を走査させて、道路8の表面に照射したレーザビーム9の方位毎の測距データを出力する測域センサ1と、レーザビーム9の投光面の一部を含んだ道路8の表面を撮像するカメラ3と、測域センサ1、及びカメラ3を道路8の表面に沿って車輪7を回転させて移動させる走行台車5と、走行台車5により測域センサ1、及びカメラ3を移動させた時に測域センサ1から得られた測距データを演算処理してz軸方向の位置座標を求め、カメラ3から得られた画像データを演算処理してx軸方向、並びにy軸方向の位置座標を求める位置座標検出手段と、位置座標検出手段により求められた各軸方向の位置座標に基づいて道路8の三次元形状を演算するPC4と、を備えて構成されている。
(もっと読む)
光学式検出装置、電子機器及び投射型表示装置
【課題】広い検出エリアにおいて検出精度の均一化ができる光学式検出装置、電子機器及び投射型表示装置等を提供すること。
【解決手段】光学式検出装置は、照射光LTを出射する照射部EUと、検出エリアRDETに存在する対象物OBにより照射光LTが反射することによる反射光LRを受光する受光部RUと、受光部RUの受光結果に基づいて、対象物OBの位置検出情報を検出する検出部110とを含む。照射部EUは、検出エリアRDETが設定される対象面SOBに対して斜め方向となる第1の面SF1と、対象面SOBに対して斜め方向となり、且つ、第1の面SF1よりも対象面SOBとの成す角が大きい第2の面SF2とにより規定される照射範囲に、第1の面SF1に沿う方向において第1の強度であり、第2の面SF2に沿う方向において第1の強度よりも強度が低い第2の強度である照射光LTを出射する。
(もっと読む)
位置検出システム、表示システム及び情報処理システム
【課題】 撮像装置のレンズ及び撮像素子を対象面と平行な方向に沿う方向に配置するこ
とで、撮像画像における歪みを抑止し、位置検出の精度を向上させる位置検出システム、
表示システム及び情報処理システムを提供すること。
【解決手段】 位置検出システム400は、撮像画像を撮像する撮像部500と、撮像部
500からの撮像画像に基づいて、対象面20に設定された検出エリアでの対象物OBの
座標情報を求める座標演算部430と、を含み、撮像部500は、レンズ部LEを有する
光学系と、撮像素子IMとを含み、撮像部500から対象面20の中央部へと向かう方向
である第1の方向と、対象面20のなす角度α1とし、レンズ部LEの光軸方向である第
2の方向と対象面20のなす角度をα2とした場合に、角度α1及び角度α2は、α1<
α2を満たす。
(もっと読む)
炉壁形状測定装置、炉壁形状測定システム、および炉壁形状測定方法
【課題】炉壁表面の凹凸形状を測定するためのレーザ光と炉壁の自発光とを同時に取得しつつもレーザ光と自発光とが干渉せず、炉壁表面に対し垂直方向の計測可能範囲およびレーザ光の照射範囲を広くする。
【解決手段】スリット状の窓2を有する断熱性保護箱3の内部に配置された、スリット状のレーザ光を射出するスリットレーザ光源4と、レーザ光を反射して窓2を介して炉壁表面へレーザ光を照射するレーザ光用ミラー5と、窓2を介して断熱性保護箱3の内部に入射する、レーザ光の照射による炉壁表面の反射光および炉壁表面が発する自発光を反射する撮像用ミラー6と、撮像用ミラー6から反射された自発光と反射光とを光学フィルタ7を介して撮像する撮像装置8とを備える。
(もっと読む)
基板検査装置及び基板検査方法
【課題】基板に形成された凹部の深さを、加工方法の制約を受けず、かつ、任意の時間に、非破壊、非接触で測定する技術を提供する。
【解決手段】基板9に形成された貫通ビア9H(凹部)の深度を検査する基板検査装置100であって、基板9に向けて電磁波パルスを照射する電磁波パルス照射部13と、電磁波パルスを検出する電磁波パルス検出部15とを備える。また、基板検査装置100は、貫通ビア9Hが形成されているビア形成領域92Rを透過した電磁波パルスの時間波形と、ビア形成領域92Rとは異なる参照領域を透過した電磁波パルスの時間波形とを比較して、その位相差を取得する位相差取得部25と、前記位相差に基づいて、前記ビア形成領域に形成された貫通ビアの深度を取得するビア深度取得部27とを備える。
(もっと読む)
三次元形状測定装置
【課題】光パルスの検出タイミングにかかわらず、奥行き方向の空間分解能及び測定精度を向上可能である三次元形状測定装置を提供する。
【解決手段】色が規則的に経時変化する光パルスを生成するチャープ導入装置と、前記光パルスをワークに照射し切り出すことで該光パルスの反射光像を取得する反射光像取得部と、反射光像を分光し複数のカラーチャンネルでの各色情報を二次元位置毎に取得する色情報取得部とを備える。前記各色情報に対応する分光特性は、前記光パルスの波長範囲において少なくとも2つが交差する。
(もっと読む)
コンクリート構造物のひずみ計測方法
【課題】施工ブロック毎に分割して構築されるコンクリート構造物のひずみを効率の良い作業で精度良く計測する。
【解決手段】施工ブロック毎に順次コンクリートを打設して構造物を構築するものとし、一つの施工ブロックのコンクリートを打設した後、隣接する施工ブロックのコンクリートを打設するための型枠内には、先の施工ブロックに埋設された可撓管に接合して連続する可撓管を配置する。複数の施工ブロックのコンクリートの打設が終了すると可撓管16内に光ファイバケーブル18を挿入するとともにグラウト17を注入し、光ファイバケーブルとコンクリート1aとを一体化する。その後、光ファイバケーブルの一端にひずみ測定器を接続し、光パルスを入射して後方散乱光を検知する。後方散乱光の周波数の変化及び後方散乱光を検知した時間から橋桁の各位置に生じたひずみの大きさを計測する。
(もっと読む)
位置および動作判定方法および入力装置
【課題】被検出体の位置を検出するとともに、被検出体の動作を的確に、かつ、高精度に判定する。
【解決手段】被検出体から発せられた赤外線を受光した赤外線検出部から出力される赤外線検出信号に基づいて、被検出体の位置および動作を判定する位置および動作判定方法であって、赤外線検出部は視野角制限体を有する少なくとも2個の赤外線センサ部を有し、2個の赤外線センサ部からそれぞれ得られる赤外線の強度の差または比をあらわす被検出体の位置信号と、赤外線の強度の各々の差または比を時間の関数とし、時間で微分することにより得た信号と、に基づいて被検出体の動作を判定する。
(もっと読む)
板材溶接部の段差量の測定方法および装置
【課題】板材を搬送中に、オンラインで板材の溶接部における段差量を正確に測定することができる板材溶接部の段差量の測定方法および装置を提供する。
【解決手段】溶接により複数の板材をつなぎ合わせた板材Sを搬送しながら、前記板材Sの溶接部S3の溶接線を横切る線上において前記板材Sまでの距離を非接触でかつ同時に多点計測し、前記計測した距離をもとに前記溶接部S3における前記鋼板Sの段差量を算出する。好ましくは、前記溶接線を横切る線上に配列した複数のレーザ距離計41aにより前記多点計測を行なう。
(もっと読む)
位置変動監視装置およびこれを含む位置変動監視システム
【課題】監視対象領域の位置変動の測定精度を高める。
【解決手段】位置変動監視システム1は、予め決められた監視対象領域に設置された複数の監視指標2と、複数の監視指標2が撮像された撮像画像を用いて監視対象領域の位置変動を検出する位置変動監視装置3とを備える。位置変動監視装置3は、複数の監視指標2を予め設定された時間間隔で撮像する撮像部51と、撮像部51により時系列で得られる撮像画像を用いて複数の監視指標2の位置変位を求める画像解析部61と、複数の監視指標2の位置変位があった場合に警告を報知するように報知装置4を制御する報知制御部63とを備える。
(もっと読む)
有水式ガスホルダの傾斜測定方法及び装置
【課題】多段のガス槽の傾斜状態をリアルタイムで計測することができ、各ガス槽の支持部材の更新時期を的確に判断することできる有水式ガスホルダの傾斜測定装置を提供する。
【解決手段】水槽2内の水面から上昇しているガス槽を特定するガス槽特定手段27と、特定したガス槽に配置されている反射板21a〜23aに光軸が一致するように第1〜第3光波距離計25a〜25cを移動させる第1〜第3駆動部26a〜26cと、第1〜第3光波距離計が測定した反射板との距離に基づいて、特定したガス槽の傾斜情報を算出する算出手段28と、その傾斜情報を表示する表示手段29とを備えている。
(もっと読む)
1 - 20 / 209
[ Back to top ]