
Fターム[2F065FF65]の内容
光学的手段による測長装置 (194,290) | 測定方法 (22,691) | 非光学的手段との組合せ (1,677) | 角度 (528)
Fターム[2F065FF65]の下位に属するFターム
回転量 (157)
Fターム[2F065FF65]に分類される特許
81 - 100 / 371
パターンドメディア用ハードディスク表面検査装置及び表面検査方法
【課題】本発明はサーボエリアを設定し、サーボエリア、データエリアのうち少なくとデータエリアの欠陥を検出できるパターンドメディア用ハードディスク検査装置及び検査方法を提供することにある。
【解決手段】本発明はサーボエリア及びデータエリアにパターンが形成されたハードディスク表面に2次元的に走査して照射し、前記ハードディスク表面からの散乱光を受光して前記ハードディスク表面の欠陥を検出する際に、前記散乱光のうちサーボエリアから第1散乱光に基づいてサーボエリアを設定し、前記設定結果から前記散乱光のうちデータエリアからの第2散乱光を抽出し、前記データエリアの欠陥を検出することを特徴とする。
(もっと読む)
物体の水平度を求める方法

【課題】物体の水平度を測定する専用の計器を用いることなく、前記物体の水平度を求める際に前記物体に取り付けるターゲットの数を少なくすることにより、前記物体への前記ターゲットの取付けに要する手間や費用を低減すること。
【解決手段】物体の水平度を求める方法は、ターゲットを有する台を前記物体に回転可能に取り付けること、前記台を回転させつつ、前記ターゲットが第1の位置にあるときにおける前記ターゲットの第1の三次元座標と、前記ターゲットが第2の位置にあるときにおける前記ターゲットの第2の三次元座標と、前記ターゲットが第3の位置にあるときにおける前記ターゲットの第3の三次元座標とを測定すること、前記第1の三次元座標、前記第2の三次元座標及び前記第3の三次元座標から、水平面に対する、前記第1の位置と前記第2の位置と前記第3の位置とを含む平面の傾きを算出することを含む。
(もっと読む)
気相成長装置および気相成長方法
【課題】
MOCVD装置の基板など移動台の上に置かれた被測定物の形状測定を行う場合、速度計測装置の使用状態で異なるオフセット値の影響により、測定精度が低下することと、回転台に複数の被測定物を配置する装置で測定精度が低下すること、回転台の振動や回転軸の傾きなどで測定精度が低下することなどで、精度よく測定することができなかった。
【解決手段】
被測定物を移動させる移動台と、レーザ光線によるドップラー効果を利用した速度計測手段と、被測定物検出手段と、演算処理手段と記録手段により、被測定物の形状を測定する。前記演算処理手段は、前記被測定物の速度を抽出する被測定物速度抽出手段と、速度データから速度平均値を算出する速度平均算出手段と、速度データから速度平均値を減算する減算手段と、速度を積分する積算手段を設ける。
(もっと読む)
形状測定装置
【課題】測定者に被測定物体に対するプローブの位置やライン光の照射角度をアシスト(支援)することができる形状測定装置を提供する。
【解決手段】光学式センサにより被測定物体51の形状を測定して測定情報を出力するプローブ12と、複数のアーム部11a及びプローブ12を回転可能に接続する2以上の関節部11bを有し、所定の空間内でプローブ12を移動可能に支持する移動機構部11と、関節部11bに設けられ、当該関節部11bが接続するアーム部11a間、若しくは、アーム部11aとプローブ12との角度情報を検出するエンコーダ21と、表示部30と、測定情報及び角度情報から、被測定物体51の形状情報を算出するとともに、形状情報を表示部30に出力する制御部20と、を有する形状測定装置100において、制御部20は、プローブ12の操作を支援するアシスト表示を表示部30に表示するように構成される。
(もっと読む)
形状測定装置
【課題】測定者の操作に応じて関節部の回転動作を補助するように構成された形状測定装置を提供する。
【解決手段】形状測定装置100は、光学式センサ40により被測定物体51を非接触で走査して当該被測定物体51の形状の測定情報を出力するプローブ12と、アーム部11a及び2以上の関節部11bを有し、所定の空間内でプローブ12を移動可能に支持する移動機構部11と、関節部11bの各々に設けられ、当該関節部11bが接続するアーム部11a間、若しくは、アーム部11aとプローブ12との角度情報を検出するエンコーダ21と、関節部11bに設けられ、当該関節部11bにより接続された一方のアーム部11a若しくはプローブ12を他方のアーム部11aに対して回転駆動させる駆動部15と、角度情報からプローブ12の移動を検出して駆動部15を作動させる制御部20と、を有する。
(もっと読む)
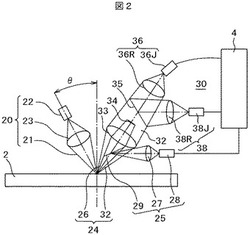
形状測定装置
【課題】測定者の位置や姿勢に関わらず、常に、被測定物体の測定結果を目視で確認することができる形状測定装置を提供する。
【解決手段】被測定物体51の形状を測定して測定情報を出力するプローブ12と、アーム部11a及び2以上の関節部11bを有し、所定の空間内でプローブ12を移動可能に支持する移動機構部と、関節部11bに設けられ、当該関節部11bが接続するアーム部11a間、若しくは、アーム部11aとプローブ12との角度情報を検出するエンコーダ21と、表示部30と、測定情報及び角度情報から、被測定物体51の形状情報を算出するとともに、この形状情報を表示部30に出力する制御部20と、を有する形状測定装置100において、表示部30を、測定者の頭部に装着され、この測定者の少なくとも一方の眼前に形状情報を投影する投影部35を有するヘッドマウントディスプレイで構成する。
(もっと読む)
形状測定装置
【課題】形状測定中は移動機構部を固定することができる形状測定装置を提供する。
【解決手段】光学式センサ40により、静止した状態で被測定物体51の表面を測定して測定情報を出力するプローブ12と、アーム部11a及び少なくとも2以上の関節部11bを有し、所定の空間内でプローブ12を移動可能に支持する移動機構部11と、関節部11bに設けられ、アーム部11a間、若しくは、アーム部11aとプローブ12との角度情報を検出するエンコーダ21と、関節部11bを被測定物体51に対して静止させるロック機構部15と、光学式センサ40により測定情報を取得し、エンコーダ21から角度情報を取得して、被測定物体51の形状情報を算出する制御部20と、を有する形状測定装置100において、制御部20は、光学式センサ40により被測定物体51を測定するときに、ロック機構部15を作動させて関節部11bを静止させるように構成される。
(もっと読む)
外径計測装置
【課題】被計測物の外径を被計測物を静止させた状態で精度良く計測し得る外径計測装置を提供する。
【解決手段】一対の光照射部1が、それら一対の光照射部1の並び方向に直交する方向にレーザー光を互いに平行に照射する状態で、間隔変更部Aにより互いの間隔を変更自在に光照射台Bに設けられ、間隔変更部Aにより変更される一対の光照射部1の光照射間隔又はその光照射間隔を求めることが可能な寸法を計測する光照射間隔計測部Cが、光照射台Bに設けられ、一対の光照射部1の並び方向が被計測物Wの周方向と平行な状態で一対の光照射部1の中間にて被計測物Wの径方向と直交し且つ一対の光照射部1夫々のレーザー光照射方向が被計測物Wの径方向と平行になる状態で、光照射台Bを被計測物Wの外周部に沿って配置する光照射台配置部Dを備えている外径計測装置。
(もっと読む)
道路勾配推定装置
【課題】路面の勾配をより精度良く推定することができる道路勾配推定装置を提供する。
【解決手段】道路勾配推定装置10は、自車両Cが走行する路面の勾配を推定する道路勾配推定装置であって、路面に向けてレーザー波を放射するレーザー波放射部1と、路面からの反射波を受信する反射波受信部2と、反射波受信部2により受信された反射波に基づいて反射点Qb,Qcを検出する反射点検出部3と、反射点検出部3により検出された第一反射点Qcと、第一反射点Qcより一つ前に検出された第二反射点Qbとを繋ぐ線分となる路面Hcの勾配角度Dcが所定角度Θ以下であれば勾配角度Dcを路面の勾配として算出する勾配算出部4とを備え、所定角度Θは、自車両Cの車速Vが高速になるほど小さくなっている。
(もっと読む)
露光装置
【課題】 ウェハステージとマスクステージのアライメントマークを1台の撮像装置で撮像可能とする。
【解決手段】 マスクステージ18は、マスクステージマーク20を備え、マスク16を支持する。ウェハステージ32は、ウェハステージマーク42を備え、ウェハ30を支持する。撮像装置48は、マスクステージマーク20が撮像可能となる状態と、ウェハステージマーク42が撮像可能な状態とに切替えられる。制御部40は、撮像装置48によって撮像されたマスクステージマーク20の位置情報とウェハステージマーク42の位置情報に基づいてアライメントを実行する。
(もっと読む)
回転位置検出装置
【課題】カメラの前方視界の妨げず、鋼管内面の撮影上で逆光状態とならずに、鋼管内面の周方向の位置を特定することを可能にすることにある。
【解決手段】鋼管検査測定装置102に固定されるベース部材21と、偏心位置を揺動中心22cとしてベース部材21に取り付けられ時計方向の側面位置の第1可動接点22a及び反時計方向の側面位置の第2可動接点22bを有する可動端子22と、重心が揺動中心22cより下方に位置し静止した可動端子22の第1可動接点22aに対向し可動端子22が時計方向に揺動した際に第1可動接点22aと接触する第1固定接点23aを有する第1固定端子23と、重心が揺動中心22cより下方に位置し静止した可動端子22の第2可動接点22bに対向し可動端子22が反時計方向に揺動した際に第2可動接点22bと接触する第2固定接点24aを有する第2固定端子24とを備えている。
(もっと読む)
自律移動装置及びその制御方法
【課題】自己位置推定機能と足元の障害物検出機能とを良好に両立させること。
【解決手段】非接触式の距離センサ17と、移動状況に関する所定の条件に基づいて、足元の障害物検出処理か自己位置推定処理のいずれの処理を実行するか判定する判定部58と、足元の障害物検出処理を実行する場合に、距離センサ17からの測定信号の方向を足元付近に向けて変化させ、自己位置推定処理を実行する場合に、測定信号の方向を遠方の対象物を測定可能となる向きに変化させる反射部19と、距離情報に基づいて足元の障害物を検出する足元障害物検出部57と、距離情報に基づいて自己位置を推定し、移動量から求めた自己位置を、推定した自己位置を用いて補正する自己位置推定部55と、検出した障害物情報と、補正した自己位置とに基づいて、移動装置23の制御を行う走行制御部59と、を備える。
(もっと読む)
研磨された原石のインクルージョンの検出
3Dモデルを生成し、および/またはダイヤモンドのような研磨原石におけるインクルージョンを検出する、方法および機器について示した。原石は、一連の個別の増分で回転される。原石の各回転位置では、原石に平行光が照射され、輪郭画像が記録される。また、原石には、各回転位置で、(更なる回転の前に)拡散光が照射され、拡散画像が記録される。画像は、解析され、原石の表面の3Dモデルが取得される。次に、拡散画像において、特徴物が同定され、これは、後続の拡散画像の間でトラックされる。トラック化特徴物は、原石による光線の反射および屈折を考慮して、原石の3Dモデルに対して配置される。その後、特徴物のいくつかまたは全てがインクルージョンとして同定される。 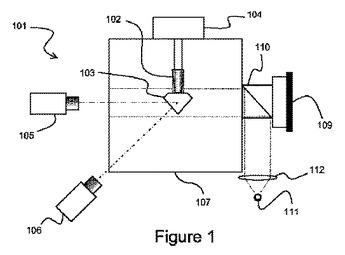 (もっと読む)
(もっと読む)
レール変位量測定におけるレール検出方法およびレール変位量測定装置
【課題】
レール近傍にあって頭面がレールに比べて比較的幅のある平面形状の物体をレールと誤検出することを防止することができるレール変位量測定装置におけるレール検出方法を提供することにある。
【解決手段】
この発明は、測定三角形が形成されたときのこの測定三角形において測定されるレールの位置とこの測定三角形において第1の距離検出器あるいは第2の距離検出器のいずれかにより測定されるレールの位置との位置誤差を算出して、この位置誤差が所定値の範囲にあるときに測定対象をレールとして検出する。
(もっと読む)
携帯端末
【課題】 空間的に離間した複数の撮影点で同じ対象物を被写体として撮影して撮影点間の相対位置を判定することができる携帯端末を提供する。
【解決手段】 被写体を撮影して静止画像を生成するカメラ16と、カメラ16の光軸の向き及び光軸を中心とする傾きを検出する姿勢検出部32と、静止画像から特徴点を抽出する特徴点抽出部24aと、静止画像内の特徴点に対応する被写体上の点及び当該静止画像の撮影が行われた撮影点間の距離を測定する距離測定部25と、第1撮影点で撮影された第1画像内の特徴点について測定された距離、第2撮影点で撮影された第2画像内の上記特徴点について測定された距離、並びに、第1撮影点及び第2撮影点でのカメラ16の向き及び傾きの各検出結果に基づいて、第1撮影点に対する第2撮影点の相対位置を判定する位置判定部26により構成される。
(もっと読む)
地図画像統合データベース生成システム及び地図画像統合データベース生成プログラム
【課題】移動体に固定された軸を使用せず、任意の方向にある撮影対象物の位置を取得することができる撮影対象位置特定装置、地図画像統合データベース生成装置及び撮影対象位置特定プログラムを提供する。
【解決手段】撮影装置10が撮影対象を撮影すると、制御装置16は、この画像情報とともに、撮影装置10のシャッターに同期あるいは非同期で角度距離計測器12が計測した撮影装置10の撮影位置と撮影対象との距離データと撮影装置10の撮影方向の方位角及び仰俯角を取得する。また、上記シャッターに同期あるいは非同期で、座標計測装置14から撮影装置10の撮影位置の座標情報を取得する。次に、制御装置16は、上記取得した、距離データ、方位角及び仰俯角のデータ及び座標情報のデータに基づいて、撮影対象の座標情報を演算する。また、撮影対象の画像情報及びその座標情報は、互いに関連付けて出力する。
(もっと読む)
単一カメラ及び運動センサーによる3次元情報抽出
【課題】単一のカメラを使用して被写体の3次元情報を提供する。
【解決手段】二つの異なるカメラ位置から、少なくとも一つの被写体の写真を撮影する。カメラに連結される運動測定装置は、ある地点から他の地点へ移動した際のカメラの直線位置の変化及び角度方向の変化を測定し、測定して得られた情報から、被写体の3次元情報を導き出す。また、ある実施形態においては、写真の画像から被写体の3次元情報を導き出す。
(もっと読む)
タイヤ解析システムおよびタイヤ解析方法
【課題】安価な撮像装置を用いてタイヤ表面歪みの変化を測定できるタイヤ解析システムおよびタイヤ解析方法を提供すること。
【解決手段】このタイヤ解析システム1は、所定の試験条件を入力したときのタイヤ形状の変化やタイヤ表面歪みの変化を測定することによりタイヤの挙動解析を行うシステムである。このタイヤ解析システム1は、タイヤ表面の一部にタイヤ周方向に沿って配列された複数の解析用格子面Sを相互に異なる方向から同時に撮像する複数のカメラ31、31と、これらのカメラ31、31から取得した画像データに基づき解析用格子面Sの三次元座標を算出すると共にこの三次元座標に基づきタイヤ表面歪みの変化を算出する処理装置4とを備えている。そして、タイヤ10が回転して解析用格子面Sが所定の撮像位置に来たときに、カメラ31、31が解析用格子面Sを撮像している。
(もっと読む)
三次元位置合わせ方法
【課題】圧縮機等の大型の装置を取り外して復帰させるときに、三次元測定により高精度に復元させる。
【解決手段】既設設備の一部を取り出し取り出した設備の一部を戻して復帰させるときに用いる三次元位置合わせ方法である。設備の近傍であって不動物に間隔をおいて少なくとも3個のフィールドターゲットを設定する。取り出す設備部分であって復帰時に戻される部分には、少なくとも3個の設備ターゲットを設定する。これらフィールドターゲットと設備ターゲットについて、設備の一部を取り出す前と復帰時にレーザ式測定器を用いて位置座標を測定し、その測定結果から有効なフィールドターゲットを設定する。有効なフィールドターゲットの座標を用いて、復帰時に設備ターゲットを取り出す前の状態に設定する。
(もっと読む)
部材同士の位置合わせ制御システム
【課題】どのような位置・角度に置かれたカメラで両部材に付されたマークを画像認識しても、高精度なパターンマッチングを行ってその位置関係を把握して組立装置に伝達することができる部材同士の位置合わせ制御システムを提供する。
【解決手段】カメラ19から第1及び第2の部材を見た時のカメラ平面画像を導出する平面導出処理部8と、第1及び第2のマークがカメラ平面画像で映し出された時の変形マークを求めるマーク変形処理部9と、第1及び第2の変形マークのパターンマッチングを行うパターンマッチング処理部16と、前記パターンマッチングにより前記第1及び第2の変形マークが合致した場合、前記第1又は第2の部材の移動量及び移動方向を前記第1及び第2の部材を支持している組立装置に伝達する移動伝達部17とを備えた。
(もっと読む)
81 - 100 / 371
[ Back to top ]