
Fターム[2F065FF65]の内容
光学的手段による測長装置 (194,290) | 測定方法 (22,691) | 非光学的手段との組合せ (1,677) | 角度 (528)
Fターム[2F065FF65]の下位に属するFターム
回転量 (157)
Fターム[2F065FF65]に分類される特許
121 - 140 / 371
周辺空間を光学的に走査および測定する方法
本発明は、レーザスキャナ10を用いて周辺空間を光学的に走査および測定する方法であって、レーザスキャナ10が、ある中心Cを有する走査を行うために、目標Tを含むその周りを光学的に走査および測定し、それによって、異なる中心を有するが同じ周辺空間を走査する2つの隣接する走査が測定点Xの範囲内で重複し、したがっていくつかの目標が2つの走査のいずれかによって走査され、それによって、第1のステップ中に、2つの隣接する走査を位置合わせするために、測定点内で目標の場所が特定され、第2のステップ中に、2つの隣接する走査の場所を特定された目標の間で対応関係候補が探され、第3のステップ中に、2つの隣接する走査の仮の位置合わせが行われ、重複する範囲内に測定点の十分な適合度がある場合、仮の的位置合わせが正規の位置合わせに置き換わり、したがって目標を特定する方法が提供される。  (もっと読む)
(もっと読む)
ロボットシステム
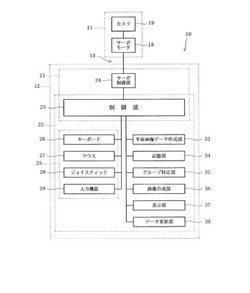
【課題】カメラ、制御装置および通信手段の能力に依存することなく、ロボットに搭載されたカメラの正確な位置合わせが容易なロボットシステムを提供する。
【解決手段】画像合成部36は、記憶部34に記憶されている平面画像データ40に基づいて合成画像55を作成する。そのため、カメラ19、制御装置12あるいは通信部13の能力によって撮影している画像と表示している画像との間に時間差が生じるときでも、操作者30は表示部37に表示されている合成画像55を参照してロボット11を操作可能である。データ更新部38は、新たな平面画像データ40のための記憶領域が不足するとき、記憶部34のデータグループのうち属する平面画像データ40の数が最も多い最多データグループ62を選択し、この最多データグループ62から合成画像55の作成のために選択された選択時刻が最も古い平面画像データ65を削除する。
(もっと読む)
傾き測定装置

【課題】従来に比べ、天候とは無関係に傾き測定終了まで要する時間を短縮することが出来、しかも測定精度を向上させることが出来る、傾き測定装置を提供することである。
【解決手段】夫々がL字形状横断面を有し、台座10に設置された物体12において台座から立ち上がった平坦な表面部位12aの上部及び下部の夫々に水平に着脱可能に固定される上部及び下部光反射部材18,20と;台座において上記表面部位に対向し台座からの振動を遮断して配置されたレーザ測定器14と;を備える。レーザ測定器により上部及び下部光反射部材の夫々の上記両端の夫々までの距離A1,A2,B1,B2及び垂直角を測定し、これらの測定値からレーザ測定器から上記夫々の上記両端の夫々までの水平距離HA1,HA2,HB1,HB2を求めるとともに、これらの水平距離の差異により上記表面部位の前後方向傾斜量及び左右方向傾斜量を求める。
(もっと読む)
機体歪み補正装置
【課題】 航空機の機体の歪みによる各目標検出センサの基準軸のずれを補正するため、従来は各センサにそれぞれ姿勢角検出器を取り付け、その検出情報に基づいて基準軸のずれを補正していたが、姿勢角検出器の搭載に伴い、各センサの大型化や質量増を招いていた。
【解決手段】 加速度センサ7が検出した航空機にかかる加速度と、第1のセンサ部1及び第2のセンサ部3の基準軸のずれ量との関係をデータテーブルとして保有する第2の信号処理部9とを用いて、航空機の機体の歪みによる各センサの基準軸のずれを補正することができる。
(もっと読む)
テールクリアランス測定装置
【課題】測定効率の向上を図れると共に、作業員の負担の軽減を図る上で有利なテールクリアランス測定装置を提供する。
【解決手段】テールクリアランス測定装置30は、カメラ部42と、検出光投射部44と、コンピュータ34とを含んで構成されている。検出光投射部44により線状の検出光Lsをセグメント端面箇所Seに投射すると共に、カメラ部42によって撮像されたテール部内周面箇所Ti、セグメント外周面箇所So、セグメント内周面箇所Si、セグメント端面箇所Seの画像データに基づいて画像データに基づいてテールクリアランスTcを導出する。
(もっと読む)
ロボットビジョンシステムおよび自動キャリブレーション方法
【課題】キャリブレーション作業を自動で手間をかけることなく行なうことを可能としたロボットビジョンシステムを提供することである。
【解決手段】提案するロボットビジョンシステムは、第1および第2のカメラにより構成されるステレオカメラ1と、アームを有するロボット4と、ステレオカメラ1およびロボット4を駆動し制御する制御装置2と、ステレオカメラ1の基礎行列算出に用いる基礎行列算出用冶具3をロボット4のアーム先端部に固定する機構と、を有する。
(もっと読む)
形状測定装置
【課題】高い測定精度を有する形状測定装置を提供する。
【解決手段】形状測定装置100は、被測定物体15の形状を測定して測定値を出力するプローブ12と、所定の空間内でプローブ12を移動させる移動機構部であるアーム部11に、プローブ12を着脱する取付部16と、空間内におけるプローブ12の空間座標を測定する空間座標測定部30と、プローブ12により測定された被測定物体15の測定値を、空間座標測定部30により測定されたプローブ12の空間座標により補正する制御部20,50と、を有して構成される。
(もっと読む)
形状測定装置
【課題】作業性を低下させることなく、被検物の測定結果のSN比を向上させる。
【解決手段】形状測定装置11は、光源26から測定光を射出して被検物12に照射するとともに、受光部27により被検物12からの測定光を受光し、被検物12の形状を測定する。光センサ部25には、その外周部分を覆うように、笠状の遮光部28が設けられており、遮光部28は、被検物12に照射され受光部27に入射する外乱光が、被検物12に照射されないように、外乱光を遮光する。これにより、受光部27に外乱光が入射することを防止することができ、受光部27が測定光を受光して得られる電気信号のSN比を向上させることができる。また、遮光部28が邪魔になって測定者が被検物12を視認できなくなるようなこともないので、作業性が低下することもない。本発明は、形状測定装置に適用することができる。
(もっと読む)
ロボットのツール位置検出方法、ロボットと対象物との相対位置検出方法、及びそれらの装置
【課題】ツール位置やロボットと対象物との相対位置を簡単かつ高精度に検出する。
【解決手段】ロボット2のアーム7先端のツール取付部7eに球面部8aを有するツール8を取り付け、ツール取付部7eから球面部8aの中心までのツールベクトルの成分に未知数を設定し、球面部8aを平板16に対してツール8の姿勢を変えて少なくとも未知数の数と同じ回数当接させ、その当接時のロボット2のアーム7の関節角度に基づいて当接時のツール取付部7eの位置をそれぞれ求め、特定の座標系において、平板16のZ位置と球面部8aの曲率半径Rcとの和から得られる球面部8aの中心のZ位置が、ツール取付部7eのZ位置とツールベクトルのZ成分との和から得られる球面部8aの中心のZ位置に等しいことを意味する連立方程式を少なくとも未知数の数と同じ回数連立させ、その連立方程式を解くことでツールベクトルの成分を求める。
(もっと読む)
長尺重量物のアライメント支援方法、長尺重量物のアライメント支援システム
【課題】長尺重量物のアライメント容易に行うことが可能な長尺重量物の位置合せ支援方法、およびアライメント支援システムを提供する。
【解決手段】建屋座標系Oで目標位置が定められた長尺重量物のアライメント支援システムであって、前記長尺重量物である電磁石12に固定され、前記目標位置が設定された計測用ターゲット26と、前記電磁石12に配設され、前記長尺重量物を所定の調整軸方向に移動させてアライメントを行う調整機構14と、前記計測用ターゲット26の現在位置を測定して現在位置のデータを出力する計測装置16と、前記現在位置のデータが入力され、前記現在位置のデータと前記目標位置のデータとの偏差を前記計測用ターゲットによって形成される平面を基準として構成された座標軸によるローカル座標系Lに変換する演算手段18と、を有してなる。
(もっと読む)
単一映像を利用した姿勢角センサー三次元誤整列補正方法
【課題】飛行体に装着された映像獲得カメラで撮影された単一映像情報から地上制御点を計算して姿勢角センサーの三次元誤整列情報を定量的に抽出して補正する単一映像を利用した姿勢角センサー三次元誤整列補正方法に関する。
【解決手段】地上制御点基準ベクターの計算段階と、映像情報を利用した地上制御点観測ベクターの計算段階と、計算された前記地上制御点基準ベクターと前記地上制御点観測ベクターを利用した姿勢誤差行列計算段階と、前記姿勢誤差行列計算値を利用した姿勢角センサー誤整列の補正段階とを含んで成り立つ。
(もっと読む)
顔向き検知装置
【課題】 スリットの検出回数を低下させることなく、あるいはカメラの撮影回数を増やすことなく環境光の影響を低減させ、被検出物体の処理精度を向上させた顔向き検知装置を提供する。
【解決手段】 スリット光をドライバの顔に投光するとともに、このドライバの顔に対する前記スリット光の投光角度を可変とする投光手段と、前記ドライバの顔に投光された前記スリット光の画像を撮影する撮影手段と、前記投光手段に対し投光指令をおよび投光角度指令を出力し、かつ前記撮影手段に前記画像の撮影タイミング指令を出力する制御手段とを備え、前記制御手段は、異なる時間に撮影され、かつ異なる投光角度で撮影された複数の前記スリット光画像を比較し、前記ドライバの顔向きを算出する画像処理手段を有することとした。
(もっと読む)
車両事故防止システム
【課題】
自車後方の情報を取得し、安全な走行を支援すること可能な技術を提供する。
【解決手段】
車両事故防止装置10は、自車両に搭載され自車両の後方を異なる視点から撮像し、視差のある第1の画像及び第2の画像を出力する撮像装置20と、自車両の速度の低下、もしくは走行方向の変化を検出するセンサ群40と、撮像装置20の出力から他車両を認識すると、自車両と前記他車両との位置関係、自車両から前記他車両までの距離、および前記他車両の速度を算出して、自車両と他車両の衝突の可能性を判断し、衝突の可能性のある場合に警告を発する制御部11と、を有する。
(もっと読む)
座標位置検出装置及び座標位置検出方法
【課題】ティーチング作業時に、アーム取付体から加工ヘッドを取り外すことなく、より簡単な構成で、レーザ溶接点等のターゲットの座標位置を検出することが可能とする。
【解決手段】座標位置検出装置は、揺動自在で、それぞれのラインレーザ光22a〜22cの平面が互いに平行にならないように設置された少なくとも3つのスリットレーザ照射器20a〜20cと、各スリットレーザ照射器20a〜20cの揺動角度を検出する揺動角度検出手段(ロータリーエンコーダ30a〜30c)とを有する。
(もっと読む)
ピッキングシステム
【課題】作業ミスを防止できるピッキングシステムを提供する。
【解決手段】ピッキングシステム1は、複数の保管部2を設けた保管棚3と、取り出す物品Wを保管した保管部2を指示する指示手段15とを備える。ピッキングシステム1は、指示した保管部2から物品Wを取り出したかどうかを確認する確認手段を備える。確認手段は、保管棚3の近傍位置の2次元領域に向けて検知光を投光する投光部と、作業者の手からの反射光を受光する受光部と、作業者の手の位置までの距離情報とその位置に対応する角度情報とに基づく位置情報を取得する位置情報取得部とを有する。確認手段は、各保管部ごとの検知エリア情報を記憶する記憶部と、取得した位置情報が指示した保管部2に対応する検知エリア情報内のものであるか否かを判断する判断部とを有する。
(もっと読む)
撮影カメラの位置算出装置
【課題】容易にかつ確実に撮影カメラの位置を算出可能な、被写体の映像を撮影するために撮影スタジオを移動機構により移動する撮影カメラのカメラ位置算出装置を提供する。
【解決手段】撮影カメラの位置算出装置1は、カメラパラメータが入力されるカメラパラメータ入力手段10と、傾斜誤差値と回転誤差値とが入力される誤差情報入力手段15と、カメラパラメータを記憶するカメラパラメータ記憶手段20と、カメラパラメータ記憶手段20が記憶する更新カメラパラメータを更新するカメラパラメータ更新手段30と、カメラパラメータを用いて、初期カメラ位置と更新カメラ位置とを算出するカメラ位置情報算出手段40と、撮影予定位置入力手段50と、カメラ位置情報と撮影予定位置より撮影カメラの移動量及び方向を算出する移動量算出手段60とを備える。
(もっと読む)
樹木情報計測方法、樹木情報計測装置、プログラム
【課題】高精度な樹木情報を少ない労力で取得できる樹木情報計測方法、樹木情報計測装置及びプログラムを提供すること。
【解決手段】距離データ取得手段16、11が、複数の地点で被計測物の任意の部位までの距離データを計測するステップS10と、特徴データ抽出手段が、前記距離データから、樹木の幹に相当するひとまとまりの特徴データを抽出するステップS20、S201と、マッチング手段32が、複数地点の前記距離データをスキャンマッチングにより対応させ、三次元の座標系に特定するステップS30、S206と、単木抽出手段33が、三次元の座標系に特定された座標点データから単木を抽出するステップS40、S300と、樹木情報検出手段34が、樹高、幹の直径、樹冠長又は樹冠直径の1以上を含む樹木情報を単木毎に検出するステップS50、S600と、を有することを特徴とする樹木情報計測方法を提供する。
(もっと読む)
三次元データ処理装置、三次元データ処理プログラム、および三次元データ処理方法
【課題】三次元計測装置で得られた点群データを容易に取り扱い可能な三次元データ処理装置、三次元データ処理プログラム、および三次元データ処理方法を提案する。
【解決手段】三次元データ処理装置1は、記憶部11と、演算処理部12と、表示部13と、入力部14とから構成される。演算処理部12は、点群データ5から距離画像19を生成する距離画像生成部23と、点群データ5から球面画像18を生成する球面画像生成部24と、少なくとも距離画像19を用いて測定対象物6の任意の測定点の三次元座標値(x,y,z)を算出する座標算出部25とを備える。球面画像18上のピクセル座標(l,o)の画素と、距離画像19上のピクセル座標(m,n)の画素とは、三次元計測装置2の走査位置(i,j)で一対一に関連付けられる。
(もっと読む)
位置計測装置、位置計測プログラム、位置計測方法、および位置計測システム
【課題】中央処理装置を用いず、かつ大量の通信を行わずに、情報環境内の各デバイスが位置情報を取得することができる位置計測装置、位置計測プログラム、位置計測方法、および位置計測システムを提供する。
【解決手段】記憶部に記憶されている他装置の相対位置情報が含む距離および他装置位置情報が示す座標を用いて、当該他装置が属する座標系における自装置の座標を示す自装置位置情報を計算し、計算した自装置位置情報および自装置が移動していると判定した場合における自装置が移動していることを示す移動通知を他装置と互いに通知し、他装置から移動通知が通知された場合、記憶部から、当該他装置の相対位置情報および他装置位置情報を削除することにより、装置の移動により装置間の位置関係が変化する場合であっても、移動前の無効なリストデータを用いずに、自装置位置情報を計算することができるので、正確な自装置位置情報を迅速に得ることができる。
(もっと読む)
車両用画像処理装置
【課題】演算負荷を低減すると共に、画像間での特徴点の誤対応を抑制し且つ自車運動量及び3次元座標値の算出精度を向上させることが可能な車両用画像処理装置を提供する。
【解決手段】外界カメラ2と、画像から特徴点を抽出する特徴点抽出選択部34と、第2画像から第1画像の特徴点に対応する対応点を決定するマッチング処理部35と、特徴点と対応点を用いてカメラ運動量を算出するカメラ運動算出部36と、このカメラ運動量,第1画像及び第2画像を用いて車両周囲の3次元座標値を算出する3次元座標値算出部37とを備えた車両用画像処理装置1であって、カメラ運動算出部36は、カメラ運動推定部38によるカメラ運動推定量に基づいて第2画像中で特徴点が位置すると予測される点を算出し、この算出点を中心として探索領域を限定し、限定した探索領域内で対応点を抽出する。
(もっと読む)
121 - 140 / 371
[ Back to top ]