
Fターム[2F065FF65]の内容
光学的手段による測長装置 (194,290) | 測定方法 (22,691) | 非光学的手段との組合せ (1,677) | 角度 (528)
Fターム[2F065FF65]の下位に属するFターム
回転量 (157)
Fターム[2F065FF65]に分類される特許
41 - 60 / 371
撮像装置
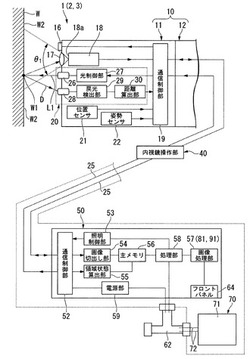
【課題】測定対象物を測定しつつ画像を取得するとともに画像を所望の視線方向から観察できる撮像装置を提供する。
【解決手段】撮像装置1は、画像を取得する撮像素子18と、測定対象物Wの被照射領域W1に光線を照射する発光部26および光線を検出する受光部28を有し、発光部から被照射領域までの距離を測定する測定部20と、発光部の位置を測定する位置測定部21と、発光部の向きを測定する姿勢測定部22と、発光部の位置および向き並びに発光部から被照射領域まで距離に基づいて被照射領域の位置および向きを算出する領域状態算出部55と、画像から抽出画像を作成する画像切出し部54と、抽出画像を領域状態算出部により算出された位置および向きに対応付けて記憶する記憶部56と、仮想空間に位置および向きに基づいて配置された抽出画像を視線方向に基づいて変換した視線変換全体画像を作成し表示部に表示させる画像処理部57と、を備える。
(もっと読む)
情報取得装置、情報取得機能付き撮影機器、情報取得用集積回路、画像表示システム、情報取得プログラム、及び情報取得方法

【課題】使用者が注目している被写体と関連のある情報を自動的に検索して表示することができる情報表示装置等を提供する。
【解決手段】被写体に関連する情報を表示デバイスに表示させる情報表示装置である。位置検出部は自装置の位置を継続的に検出する。方向検出部は撮影方向を継続的に検出する。位置特定部は位置検出部によって継続的に検出される自装置の位置と方向検出部によって継続的に検出される撮影方向とに基づいて継続的に撮影されている位置を特定し、当該位置に被写体が有るものとみなす。情報取得部は位置特定部により被写体が有るものとみなされた位置に関連付けて記録されている情報を取得する。表示制御部は、情報取得部により取得された情報を表示デバイスに表示させる。
(もっと読む)
光学式位置測定機構
【課題】光束を測定リフレクタ方向に向ける偏向ユニットを簡素かつコンパクトにする。
【解決手段】光線偏向ユニット40に二つのカルダンフレーム41,42を備えたカルダン構造を含んでおり、その内の第一カルダンフレーム41は第一回転軸A1を中心に動作的に変位自在であり、第一カルダンフレーム内にある第二カルダンフレーム42は、第一回転軸に対して直角に向いた第二回転軸A2を中心に動作的に変位自在である。二つの回転軸は、参照リフレクタ30が配設されている位置固定された参照点Rで交差している。カルダンフレームに多数のミラーが固定して配設されているので、複数のミラーを介することにより光束が、測定リフレクタへ向けられる時に位置固定された参照点を中心に旋回自在である。
(もっと読む)
円形フランジの歪量測定方法及び円形フランジの歪量測定装置
【課題】円形フランジに機器、部材等を取り付けることなく円形フランジの歪量を測定するための円形フランジの歪量測定方法及び円形フランジの歪量測定装置を提供する。
【解決手段】歪を測定しようとする円形フランジ11の前方に配置されて、特定位置Pから軸心17に対して一定角度θで旋回し円錐面状にスキャンするレーザー光を発して円形フランジ11の測定面12に照射し、測定面12からの反射レーザー光を受光して、特定位置Pから測定面12までの距離を測定するレーザー測定機13と、レーザー測定機13を載せて所定方向にレーザー測定機13の軸心17を向ける位置決め手段15と、レーザー測定機13から取得した特定位置Pから測定面12までの距離の値にcosθを乗算し距離データを得て、距離データから測定面12が完全平面と仮定した基準データを算出し、距離データから基準データを引いて、円形フランジ11の歪量を算出する演算部19とを有する。
(もっと読む)
ワーク姿勢検出装置、ワーク処理実行装置及びワーク姿勢検出方法
【課題】高精度なワークの位置決めを必要とせず、大まかに位置決めされたワークの位置・姿勢を精度良く検出することが可能なワーク姿勢検出装置、ワーク処理実行装置及びワーク姿勢検出方法を提供すること。
【解決手段】第1のビジョンカメラ7が作業姿勢のキャブ2の第1基準孔17を二次元検出位置から撮像し、撮像された画像を解析して第1基準孔17の位置を求めることによって、基準位置に対する作業姿勢のキャブ2の概略変位が暫定的に演算される。概略変位が演算されたとき、塗装ガン4c及びシーリングガン5c,6cが制御されて、第1の補正位置及び第2の補正位置に塗装ガン4c及びシーリングガン5c,6cが設定され、第1のビジョンカメラ7の第1の画角よりも狭い第2〜第4の画角に設定された第2〜第4のビジョンカメラ8,9,10が、作業姿勢のキャブ2の第1〜第3基準孔17,18,19を撮像する。
(もっと読む)
レーザ測距装置
【課題】簡単な測定作業で任意の多角形の面積を非接触で測定することの可能なレーザ測距装置を提供する。
【解決手段】レーザ測距装置1は、測定対象物10上の任意の多角形の面積を非接触で測定するレーザレーダ方式の測距装置である。2次元スキャナ3は、レーザダイオード2からのレーザ光を偏向させて測定対象物10上の任意の多角形の頂点A,B,…を照射する。フォトダイオード6は、各頂点A,B,…で反射したレーザ光を受光して信号を出力する。演算制御部7は、フォトダイオード6からの出力信号と2次元スキャナ3の動作情報を用いて多角形の面積を算出する。2次元スキャナ3は、測定対象となる多角形をレーザ光の2次元走査により描画表示する。
(もっと読む)
画像測定装置及び画像測定方法
【課題】自由度の高い画像測定装置及び画像測定方法を提供する。
【解決手段】本発明に係る画像測定装置は、撮像手段と、撮像手段によって被測定対象を撮像して得られた画像情報から被測定対象の座標情報を算出する演算手段とを有し、演算手段は、撮像手段によって被測定対象を撮像して得られた画像情報を、撮像手段に固有の誤差情報によって補正して補正画像情報を得る誤差補正手段と、補正画像情報から被測定対象の座標情報を算出する座標算出手段とを備える。
(もっと読む)
回転体の回転軸心の運動の軌跡を計測する方法及び計測システム
【課題】 回転体の回転軸心の運動の軌跡を計測する方法を提供する。
【解決手段】 主軸に回転体を取り付けることと、前記回転体の前記回転軸心に垂直な垂直面内に、前記回転体の一部を挟んで対向する3組の発光部及び受光部の組を配置することと、回転体を、前記主軸と一体的に回転させつつエッジ光の光量を測定することと、エッジ光の光量に基づいて、回転体の断面形状と異なる仮想断面形状を求めることと、エッジ光の光量及び仮想断面形状に基づいて、回転体の回転軸心の運動の軌跡を求めることとを備える方法が提供される。
(もっと読む)
視点位置算出装置
【課題】 運転者の視点位置の算出に係る信頼性の向上を図る。
【解決手段】本発明は、運転者の視点位置EPを算出する視点位置算出装置1であって、右サイドミラーRの角度と車両の運転席着座中心面Tとに基づいて第1の推定視点位置EPRSを算出する第1推定視点位置算出部12と、左サイドミラーLの角度と車両の運転席着座中心面Tとに基づいて第2の推定視点位置EPLSを算出する第2推定視点位置算出部13と、推定視点位置EPRS,EPRSが一致するか否かを判定する一致条件判定部15と、推定視点位置EPRS,EPRSが一致すると判定された場合、当該推定視点位置を運転者の視点位置EPとして算出する視点位置算出部16とを備え、視点位置算出部16は、各推定視点位置EPRS,EPRSが一致しないと判定された場合、推定視点位置EPRS,EPLSに基づいて視点位置EPを算出する。
(もっと読む)
車両ホイールへのタイヤ着座具合を検査する方法及び装置
【課題】車両ホイールへのタイヤの着座具合を点検する方法及び装置を提供する。
【解決手段】車両ホイール(1)のリム(2)に取り付けられたチューブレスタイヤ(3)の着座具合を点検するため、車両ホイール(1)のリム(2)を回転マウントの中心に締結した状態で車両ホイールを少なくとも1回転、その回転軸線回りに回転させる。ホイールの回転中、リム(2)の半径方向外縁領域及びタイヤ(3)の隣接領域の外側輪郭を距離測定装置によって走査し、リム(2)とタイヤ(3)との軸方向距離の差を検出して評価する。
(もっと読む)
マスク画像作成システム
【課題】多関節型ロボットにより移動されるカメラの視点に応じて柔軟にマスク画像を作成するとともに、マスク画像を作成する手間を減らすことのできるマスク画像作成システムを提供する。
【解決手段】マスク画像作成システムは、複数の関節を有するアーム21を動作させる多関節型ロボット20と、アーム21に設けられてアーム21の動作により移動されるとともに、ワークWを撮像して実画像を取得するCCDカメラ28と、画像処理装置10とを備える。画像処理装置10は、アーム21の位置及び方向に基づいて、カメラ28の位置及び方向を算出し、ワークWの形状を表す3次元データ、ワークWの位置及び方向、並びにカメラ28の位置及び方向に基づいて、カメラ28によりワークWを撮像したと仮想した場合の仮想画像を取得する。そして、この仮想画像に基づいて、カメラ28により取得される実画像の一部をマスキングするマスク画像を作成する。
(もっと読む)
光照射装置及び調光方法
【課題】ラインセンサカメラのライン周期と比べてPWM周期が十分に短くなくても、所望の光量を各ライン周期に供給することができ、撮像された画像における明暗差が出るのを防ぐことができる光照射装置を提供する。
【解決手段】検査対象Wに光を照射する光照射機構1と、所定のPWM周期で点灯期間及び消灯期間を交互に繰り返すPWM制御により、前記光照射機構を所定の明るさに制御するPWM制御部2と、を備え、ラインセンサカメラの各ライン周期に含まれる前記点灯期間が、1期間分又は数期間分であり、前記PWM周期が、前記ライン周期と同期しているとともに、受光素子が1ライン周期に撮像する1画素のアスペクト比が大きくなるほど、1ライン周期に含まれる前記点灯期間の数が多くなるように設定した。
(もっと読む)
情報処理装置及びその制御方法、プログラム
【課題】 自己オクルージョンが存在する環境においても、複数の撮影画像を用いて3次元空間内の対象物体の位置姿勢を高精度かつ安定的に推定するための技術を提供する。
【解決手段】 3次元空間内の対象物体の位置姿勢を推定する情報処理装置であって、複数の撮影位置から対象物体を撮影して得られた複数の撮影画像を入力する入力手段と、入力された複数の撮影画像の各々から、3次元空間内の所定の部分空間が占める領域に対応する部分画像を切り出す切出手段と、複数の撮影画像からそれぞれ切り出された複数の部分画像の特徴を示す特徴情報を、当該複数の部分画像から抽出する抽出手段と、物体の位置姿勢と、当該位置姿勢に対応する当該物体の特徴情報とを関連づけて示す辞書情報を記憶する記憶手段と、抽出手段が抽出した対象物体の特徴情報と、辞書情報に示される特徴情報とを比較して、該対象物体の位置姿勢を推定する推定手段とを備える。
(もっと読む)
衛星システム及び対象天体特徴取得方法
【課題】 未知の惑星等の対象天体の位置や3次元形状が高精度、かつ、高速に取得することができるようにする。
【解決手段】 衛星側に配置されて、対象天体の撮影画像における特徴情報を所定数抽出して送信する特徴情報取得ユニット4と、地上側に配置されて、特徴情報取得ユニット4からの特徴情報を受信して蓄積し、蓄積した特徴情報に基づき所定の画像処理及び演算処理を行う情報処理ユニット6とを備える。
(もっと読む)
情報処理方法および装置
【課題】 撮影装置から入力される画像列から指標やセンサの配置情報計測のために必要な画像を自動判定して取得できるようにする。
【解決手段】 複数の視点を移動する撮像装置を用いて、複数の視点ごとに現実空間を撮像した複数の画像を取得し、撮像装置が移動する複数の視点間の移動量を示す評価値を算出し、評価値が予め定められた閾値を超える場合に、移動量が示す移動後の視点で撮像された画像を、補正に用いる画像として決定し、複数の画像のうちの何れを、現実空間に配された位置が既知である指標の位置の補正に用いるかを判定し、補正に用いると判定された画像を用いて、指標の位置を補正する。
(もっと読む)
可動式ホーム柵測定装置及び測定方法
【課題】必要とする測定点の抽出及び可動式ホーム柵の測定が可能となり、信頼性が高く、しかも、安全で高能率な測定作業を行うことができる可動式ホーム柵測定技術を提供する。
【解決手段】離れ測定手段によって測定された測定データの変化量が閾値より大きい場合に、台車上の柵本体頂部及び支障物センサボックス頂部を測定することができる位置に設置された上部非接触位置センサにより、軌道と直交する方向の縦断プロファイルを測定し、上部非接触位置センサによって測定された測定データの変化量から支障物センサボックス設置箇所であると判定した場合に、柵本体頂部の離れと支障物センサボックス頂部の高さと離れ、支障物センサボックス下部の離れをそれぞれ求める。
(もっと読む)
3次元形状測定機の校正方法及び3次元形状測定機
【課題】撮像系の歪み補正を行うことができる3次元形状測定機の校正方法、及び、この校正方法により校正された3次元形状測定機を提供する。
【解決手段】被検物16にライン光を投影するライン光投影装置15と、投影されたライン光の像を取得する計測カメラ11と、を有し、被検物16の3次元座標を算出する3次形状測定機1において、3次元座標に含まれる計測カメラ11の歪みを補正する校正方法であって、物体面上に設置した基準点の像を取得するステップと、この像に基づいて、像面から物体面上の座標に座標変換した基準点の3次元座標(変換座標)を求めるステップと、基準点の予め測定された3次元座標と変換座標とを最小二乗式によりフィッティングしてフィッティング係数を求めるステップと、このフィッティング係数により、補正データを算出するステップと、を有する。
(もっと読む)
3次元形状測定機の校正方法及び3次元形状測定機
【課題】ライン光照明系の歪みが高精度に校正するための3次元形状測定機の校正方法、及び、この校正方法により校正された3次元形状測定機を提供する。
【解決手段】被検物17にライン光を投影する照明部であるライン光投影装置16と、被検物17上に投影されたライン光の像を取得する撮像部である測定カメラ11と、を有し、前記像から被検物17の3次元座標を算出する3次元形状測定機1において、3次元座標に含まれるライン光投影装置16の歪みを校正する3次元形状測定機1の校正方法であって、ライン光投影装置16の光軸に対して略垂直に拡散面21aを配置するステップと、ライン光投影装置16部により拡散面21aにライン光を照射して測定カメラ11でライン光の像を取得するステップと、取得した像から3次元座標を校正する補正データを算出するステップと、を有する。
(もっと読む)
欠陥検査装置
【課題】本発明は、スリットレーザ光等を、回転体状の測定対象に照射し、測定対象からの反射光を撮影した二次元画像に基づいて、回転体状かつ表面が高い反射率を有する測定対象の欠陥を高精度に検出する欠陥検査装置を実現することを目的とする。
【解決手段】本発明は、回転または直線移動する測定対象にスリット光を照射する光源と、前記測定対象からの反射光を受光してその二次元画像を出力する受光部と、前記二次元画像に基づいて、前記反射光がそのスリット幅に相当する領域以外の領域に現れるか否かによって、前記測定対象の欠陥を検出する欠陥検出手段と、を備えることを特徴とする。
(もっと読む)
点群データ処理装置、点群データ処理システム、点群データ処理方法、および点群データ処理プログラム
【課題】測定対象物の点群データからその特徴を抽出し、対象物の輪郭に係るデータを自動的かつ短時間に生成する技術を提供する。
【解決手段】測定対象物の二次画像と、この二次元画像を構成する複数の点の三次元座標データとを関連付けた点群データの中から、演算の負担の大きい非面領域に係る点群データ除去する非面領域除去部101と、非面領域のデータが除去された後の点群データに対して、面を指定するラベルを付与する面ラベリング部102と、ラベルが付与された面から連続した局所領域に基づく局所平面を利用して、対象物の輪郭線を算出する輪郭線算出部106を備える。
(もっと読む)
41 - 60 / 371
[ Back to top ]