
Fターム[2F065FF65]の内容
光学的手段による測長装置 (194,290) | 測定方法 (22,691) | 非光学的手段との組合せ (1,677) | 角度 (528)
Fターム[2F065FF65]の下位に属するFターム
回転量 (157)
Fターム[2F065FF65]に分類される特許
21 - 40 / 371
レーザ計測用ターゲット治具及びレーザ計測システム
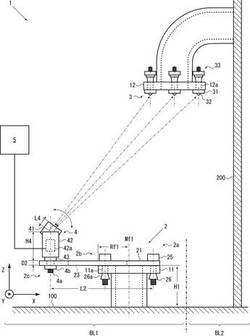
【課題】計測システム全体の小型化及び軽量化を図るとともに、配管の取付位置を正確に特定することができる、レーザ計測用ターゲット治具及びレーザ計測システムを提供する。
【解決手段】第一フランジ11に一端部2a及び中間部2bが固定される計測器用固定治具2と、第二フランジ12に固定されるレーザ計測用ターゲット治具3と、計測器用固定治具2の他端部2cに固定されるレーザ計測器4と、第一フランジ11及び第二フランジ12の位置を算出する演算手段5と、を備え、レーザ計測用ターゲット治具3は、第二フランジ12に配置される台座31と、レーザ光を反射可能な表面32aを有し台座31に表面の一部が突出するように固定された球体32と、台座31を第二フランジ12に固定する固定手段33と、を有する。
(もっと読む)
曲率半径測定機の被測定体保持位置補正方法および曲率半径測定機

【課題】曲率半径測定機の被測定体保持位置補正方法において、曲率半径測定機に発生する被測定体保持位置のずれを精度よく迅速に補正することができるようにする。
【解決手段】曲率半径測定機の被測定体保持位置補正方法であって、保持工程と、校正用光学部材の校正面の面頂を測定光束の集光位置に位置合わせし、位置合わせ後の干渉縞画像に基づく干渉縞画像情報を記憶する基準調整工程(ステップS3)と、この位置を基準位置として、基準位置から位置ずれ測定位置に被測定体を相対移動して干渉縞画像を記憶する位置移動工程と、各位置での干渉縞画像に基づいて干渉計の光軸に対する位置ずれ量を測定する位置ずれ算出工程(ステップS6、S13)と、この位置ずれ量に基づいて、位置補正量を算出する位置補正工程(ステップS15)と、を備え、被測定面の曲率半径の測定を行う際に、位置補正量に基づいて保持台の位置補正を行う。
(もっと読む)
道路勾配推定装置及びプログラム
【課題】先行車や車線境界線等の特定物体が存在しない場合でも、前方道路の勾配を精度良く推定する。
【解決手段】路面反射点抽出部22で、レーザレーダ12の観測データから路面反射点を抽出し、第1の立体物候補抽出部24で、残りの点群から第1の立体物候補を抽出する。また、第2の立体物候補抽出部26で、撮像画像から垂直エッジの検出またはパターン認識により第2の立体物候補を抽出し、路面接地点算出部28で、撮像画像上の第2の立体物候補から路面接地点を検出し、その第2の立体物候補に対応する第1の立体物候補の距離情報を用いて、路面接地点の3次元位置を算出する。道路勾配推定部30で、路面接地点算出部28で算出された路面接地点の3次元位置、及び路面反射点抽出部22で抽出された路面反射点の3次元位置を、自車両を中心とする3次元座標空間にプロットして、路面モデルをフィッティングして道路形状を推定する。
(もっと読む)
情報処理プログラム、情報処理方法、情報処理装置および情報処理システム
【課題】マーカを精度良く認識する点について改善された情報処理プログラム等の提供。
【解決手段】情報処理装置のコンピュータを、画像を逐次取得する画像取得手段、取得された画像から特定対象を検出する特定対象検出手段、検出された特定対象の中央領域から得られた画素値に基づいて、当該中央領域に関連する第1領域情報を検出する第1領域情報検出手段、その検出結果が所定の条件を満たすか否かを判定する第1判定手段、特定対象のうち中央領域の周辺に存在する周辺領域から得られた画素値に基づいて、当該周辺領域に関連する第2領域情報を検出する第2領域情報検出手段、および少なくとも、第1判定手段による判定結果が肯定である場合に第2領域情報検出手段により検出された第2領域情報を出力する出力手段として機能させるための情報処理プログラム。
(もっと読む)
運転支援装置
【課題】道路のスロープ特性と渋滞予兆とを考慮して燃費を向上させるための車両の運転支援装置の提供。
【解決手段】カメラから路面映像を受信する路面映像入力手段135と、路面映像を鳥瞰変換する鳥瞰変換手段136と、鳥瞰変換された路面映像から複数個の車線を抽出する車線抽出手段137と、抽出された複数個の車線の傾きを算出する傾斜度算出手段138と、複数個の車線の傾の差異値を利用して路面傾斜度を算出する路面傾斜度算出手段139と、自車両の加速度を検出する手段と、検出した加速度の周波数分析から周波数に対応するパワースペクトルを算出する手段と、算出したパワースペクトルの単回帰直線を演算し、所定周波数範囲での当該単回帰直線の傾きの変化量の極大値を傾き極大値として算出する手段133とを備える。運転支援装置は、路面傾斜度が所定値よりも大きく、かつ傾き極大値が自車両前方での渋滞予兆を示す場合に、運転支援をおこなう。
(もっと読む)
ロボット装置
【課題】高精度なエンコーダーを用いずに、可動部の位置制御を高精度に行うロボット装置を提供する。
【解決手段】基体1と、基体1に対して駆動可能な可動部2と、可動部2を駆動するアクチュエーター3と、可動部2とともに動く部分に取り付けられた慣性センサー4と、画像を撮影し画像により慣性センサー4の位置または角度を検出する絶対位置検出部として、画像センサー5及びマーカー6と、画像センサーにより検出された位置情報の間を、慣性センサー4の信号で補間する演算部9と、を備える。
(もっと読む)
測定補助器具およびそれを用いた直径測定方法
【課題】 円形材料等の測定対象物に対し、レーザトラッカーから見て反対側の面の空間座標を測定すること、並びに外周面における任意の高さ位置の空間座標を測定することを可能にする測定補助器具を提供する。
【解決手段】 測定補助器具20は、ターゲットTgを設置するターゲット設置部材21と、その下側に位置固定で設けられ測定対象物Wの上端面に接触させる上端面接触部材22と、その下方に配置され測定対象物Wの周面に接触させる周面接触部材23と、上面接触部材22に対する周面接触部材の高さを調整する高さ調整機構24とを備える。レーザトラッカー1により、測定対象物Wに設けられたターゲットTgにレーザ光Lbを照射し、その反射光からターゲットTgの空間座標を求める。求められた空間座標から、測定対象物Wの外周面における周面接触部材23との接触箇所の空間座標を得る。
(もっと読む)
シャフトの変形を測定するための装置及び方法
【課題】 シャフトの変形を測定するための装置及び方法を提供する。
【解決手段】 デバイスによってシャフト2の変形を測定するための方法が、変形が加えられる前に、シャフト2に付加されたパターン3を照明するステップと、パターン3によって反射された放射線を検出することによって第1基準位置を検出するステップとから成り、変形が加えられた後に、パターン3を照明するステップと、パターン3によって反射された放射線を検出することによって第2基準位置を検出するステップとから成る。これにより、第1基準位置と第2基準位置との間の距離に基づいて、シャフトの円周方向の変形及び/又はトルクが求められる。
(もっと読む)
転がり軸受の表面検査装置
【課題】軌道輪表面の仕上がりの良否を簡易にかつ自動的に判断可能であり、製造コストが安価であると共に検査処理が簡単でありしかも精度の高い検査が可能な転がり軸受の表面検査装置を提供する。
【解決手段】検査表面に対しレーザ光を照射し、表面で反射したレーザ光を受光するレーザ光送受手段と、受光した光強度に対応する電気信号を出力する光電変換手段と、レーザ光照射部を軌道輪の軸と同軸で回転させる周方向走査手段と、レーザ光送受手段を軌道輪の軸に沿って移動する軸方向走査手段と、周方向走査の各位置において、光電変換手段から出力される電気信号出力の、軸方向における最大値を取得する最大値取得手段と、取得した最大値のうち、ハレーション状態に対応する最大値の個数を計数するハレーション個数計数手段と、ハレーション個数計数手段により計数されたハレーション個数に応じ、軌道輪の良否を判断する判断手段とを備える。
(もっと読む)
情報処理方法及び情報処理装置
【課題】 複数の撮像装置をそれぞれ処理装置に接続した状態で、第1の撮像装置の位置姿勢情報計測値を第2の撮像装置の位置姿勢に変換するための較正情報をより簡便に取得することを目的とする。
【解決手段】 マスタ演算処理装置300は、ビデオカメラ120が撮影したランドマークを含む撮影画像を入力し、ビデオカメラ120の位置姿勢を算出し、スレーブ演算処理装置1300に送信する。スレーブ演算処理装置1300は、ビデオカメラ1120で撮像された画像上のランドマークの識別番号及び画像座標を取得し、(画像座標−世界座標−マスタ撮像装置位置姿勢)の組としてデータリストを生成する。生成したデータリストより較正情報算出部1340は、画像座標の理論値と実際の観測値との誤差が最小となるようにビデオカメラ120からビデオカメラ1120への位置姿勢の較正情報を算出する。
(もっと読む)
移動物体検出装置
【課題】レーダを用いることなく、車両に搭載された撮影手段によって撮影された画像から、車両の進行方向を横切る移動物体を精度良く検出すること。
【解決手段】車両の進行方向に対応する、画像の無限遠点とビデオカメラ10の焦点とを結ぶ線分と、車両から見た移動物体の実際の動きベクトルの向きに対応する、各特徴点の消失点とビデオカメラ10の焦点とを結ぶ線分がなす角度を、車両の進行方向に対する各特徴点の相対的進入角度として算出する。そして、算出した各特徴点の相対的進入角度が所定の閾値θth以上であるかにより、移動物体が、車両の進路を横切る進路横断移動物体であるか否かを判定する。
(もっと読む)
測距装置、測距方法および撮像装置、撮像方法
【課題】 カメラやビデオカメラ等において、被写体となる対象の距離を測定する測距装置、測距方法および同装置を備える撮像装置、撮像方法に関する。
【解決手段】 所定の間隔を設けて配置された複数の撮像素子と、各撮像素子上に測距の対象の像を結像させるレンズと、各撮像素子に設定される複数の測距エリアから結像に応じて出力される画像信号に基づいて、測距の対象までの距離を各測距エリアごとに算出する距離算出手段と、算出された距離の分布を生成する距離分布生成手段と、生成された距離の分布に基づいて測距の対象が存在する測距エリア内の位置を特定する測距対象位置特定手段と、を有する測距装置による。
(もっと読む)
ステレオカメラの校正装置および校正方法
【課題】ステレオカメラの校正装置および校正方法を提供すること。
【解決手段】ステレオカメラの校正装置300は、第1カメラ320と、第2カメラ318と、カメラステー140とを含んでおり、コリメータユニット302がステレオカメラから距離を隔てて配置されたテストチャート306が無限遠位置に配置されたと等価な光路を形成させている。視差算出部362は、ステレオカメラが撮影した左右画像からテストチャート306とステレオカメラとの間の異なる光学的距離に相当する視差データを計算し、パラメータ算出部364が、視差算出部362が計算した視差データおよびテストチャートまでの実距離データを使用してステレオカメラの測距パラメータである視差オフセットbおよび距離換算パラメータaを算出している。
(もっと読む)
レーザ干渉測長装置の絶対位置測定方法、及びレーザ干渉測長装置
【課題】レーザ干渉測長装置に対する再帰反射体の絶対位置を精度良く測定できる絶対位置測定方法を提供する。
【解決手段】絶対位置測定方法は、予め設定された3つ以上の各位置に再帰反射体をそれぞれ位置付ける工程S1,S4と、回転機構を動作させ、前記各位置にそれぞれ位置付けられた再帰反射体に対して測定光を出射可能とする各姿勢に干渉計を設定する工程S2と、回転機構の動作量に基づいて前記各姿勢間での測定光の光軸の角度変化量を算出する工程S5と、干渉計から出力される信号に基づいて前記各姿勢間での前記光軸に沿う方向の再帰反射体の位置変化量を算出する工程S6と、前記各位置、角度変化量、及び位置変化量に基づいて、レーザ干渉測長装置の基準位置を算出する工程S7と、基準位置に対する再帰反射体の絶対座標を算出する工程S8とを備える。
(もっと読む)
通過者識別装置
【課題】規定の場所を通過する通過者の外観形状を計測することによって通過者の体型を類別し、結果的に住宅内などの少人数の範囲内で個人の特定を可能にする。
【解決手段】距離センサ20は、特定面を通過する通過者の外観形状を計測した距離データを出力する。距離データ処理部31は、距離センサ20から出力された距離データを用いて通過者の胴囲を推定する機能を備える。登録情報記憶部34は、識別対象の人物の外観形状を当該人物に対応付けて記憶している。識別部35は、距離データ処理部31で推定した胴囲、身長、肩幅を、登録情報記憶部34に照合し登録情報記憶部34に登録された人物のうち類似度が判定条件を満たす通過者を選択する。
(もっと読む)
画像認識装置、装着型ロボット、及び画像認識プログラム
【課題】画像認識用のカメラの高さを自動的に検出する。
【解決手段】カメラ位置22には、前方斜め下に向けた画像認識装置用の撮像カメラ5が設置されており、その上方の光源位置21には、撮像カメラ5の画面フレーム31の内部に投影像26を投影する光源装置4が設置されている。装着型ロボットに搭載された画像認識装置は、画面フレーム31の下端と投影像26の下端との距離である投影像オフセットx2を画像データで計測し、投影像オフセットx2とカメラ高さy2を対応させた対応データマップや、あるいは計算によりカメラ高さy2を取得する。このようにして得られたカメラ高さy2は、パラメータとして記憶装置に記憶され、画像認識装置で段差などの認識するのに使用される。
(もっと読む)
透光性管状物体の厚さ測定装置
【課題】 透光性管状物体の厚さを全域にわたって短時間で精度よく測定する。
【解決手段】 測定用レーザ光をガルバノミラー35で反射させてガラス管Gに照射し、ガラス管Gの外周面で反射する反射光及び内周面で反射する反射光をラインセンサ39で受光し、反射光の受光位置からガラス管Gの厚さを検出する。サーボ用レーザ光源40からのサーボ用レーザ光をガルバノミラー35で反射させて、ガラス管Gにおける測定用レーザ光の照射位置又はその近傍位置にZ軸方向から照射する。フォトディテクタ48でガラス管Gからのサーボ用レーザ光の反射光を受光し、Y軸方向エラー信号生成回路119、Y軸方向サーボ回路120及びY軸方向ドライブ回路121が、モータ36を駆動制御することにより、測定用レーザ光の光軸がガラス管Gの中心軸と交差するようにガルバノミラー35のX軸線周りの回転をサーボ制御する。
(もっと読む)
リソグラフィ装置の位置決めシステムおよび方法
【課題】 位置決めの正確さおよび/または強健性が改善されたリソグラフィ投影装置のアライメント・システムを提供する。
【解決手段】 リソグラフィ装置の位置決めシステムは、位置決め放射線源1、第1検出器チャネルおよび第2検出器チャネルを有する検出システム、および検出システムと連絡する位置決定ユニットを有する。位置決定ユニットは、第1および第2検出器チャネルからの情報を組み合わせて処理し、組み合わせた情報に基づいて、第2オブジェクト上の基準位置に対する第1オブジェクト上の位置決めマークの位置を決定する。
(もっと読む)
撮像装置
【課題】測定対象物を測定しつつ画像を取得するとともに画像を所望の視線方向から観察できる撮像装置を提供する。
【解決手段】撮像装置1は、画像を取得する撮像素子18と、測定対象物Wの被照射領域W1に光線を照射する発光部26および光線を検出する受光部28を有し、発光部から被照射領域までの距離を測定する測定部20と、発光部の位置を測定する位置測定部21と、発光部の向きを測定する姿勢測定部22と、発光部の位置および向き並びに発光部から被照射領域まで距離に基づいて被照射領域の位置および向きを算出する領域状態算出部55と、画像から抽出画像を作成する画像切出し部54と、抽出画像を領域状態算出部により算出された位置および向きに対応付けて記憶する記憶部56と、仮想空間に位置および向きに基づいて配置された抽出画像を視線方向に基づいて変換した視線変換全体画像を作成し表示部に表示させる画像処理部57と、を備える。
(もっと読む)
レーザ測定装置
【課題】検出エリア内におけるレーザ光の実際の照射高さを容易に計測し得るレーザ測定装置を提供する。
【解決手段】レーザ測定装置100は、レーザレーダ装置1と検出用基準物体90とを備えている。検出用基準物体90の反射部は、所定の高さ方向における各位置が高さに応じた構造をなし、且つレーザ光L1が入射したときに、当該レーザ光L1が入射する高さに応じた内容の特定反射光を発するように構成されている。一方、レーザレーダ装置1は、回動反射機構40から照射されるレーザ光L1の走査エリア上に検出用基準物体90が配置されたときにこの検出用基準物体90からの特定反射光を検出している。そして、反射光の状態と高さ情報とを対応付ける対応データを参照して特定反射光の状態に対応する高さ情報を求め、検出用基準物体90におけるレーザ光の照射高さを計測している。
(もっと読む)
21 - 40 / 371
[ Back to top ]