
Fターム[2F065GG08]の内容
光学的手段による測長装置 (194,290) | 光源 (11,799) | 光源種類 (7,431) | 瞬間光源(例;ストロボ) (345)
Fターム[2F065GG08]に分類される特許
1 - 20 / 345
下水圧送管路におけるピグ位置検出装置
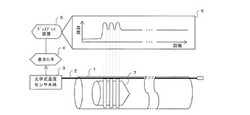
【課題】下水圧送管路内に走行させて堆積物等を除去する洗浄用ピグの走行位置を検出する場合、管路途中でピグが停止した場合は、その位置を正確に検出することが出来なかった。
【解決手段】下水圧送管路1の内壁面に、管路内を走行する洗浄用ピグ7が接触するようにセンサ用光ファイバ2を配設し、光学式温度センサ本体3からセンサ用光ファイバ2にパルス光を入射させ、センサ用光ファイバから出射される後方散乱光を測定系に導いてセンサ用光ファイバの長手方向の温度を測定し、ディスプレイ装置5に測定した温度情報を監視画面6として表示する。走行する洗浄用ピグ7がセンサ用光ファイバ2に接触して生じる摩擦により発生した熱の温度を光学式温度センサ本体で測定することにより、洗浄用ピグ7の走行位置を監視する。
(もっと読む)
画像測定装置

【課題】簡単な構造で容易に対象エリア、又は測定対象の画像が取得できると共に対象エリアの測定が行える画像測定装置を提供する。
【解決手段】投光光軸26と照明光29を射出する光源27とを有し、前記投光光軸を経て前記照明光を投射する投光光学系5と、受光光軸15と撮像素子13とを有し、測定対象からの再帰反射光29′を前記受光光軸を経て撮像素子で受光する受光光学系6と、前記撮像素子で撮像されたデータを処理する制御演算装置7とを具備し、前記投光光学系は前記投光光軸を測定対象に向け前記照明光を投射する投光ユニット25と、該投光ユニットを高低方向、水平方向に回転し、前記照明光の投射角を変更する投射角変更手段23,33と、前記受光光軸に対する前記投光光軸の方向角を検出する方向検出手段24とを有する。
(もっと読む)
マシンビジョン検査システムおよびその位置測定結果の決定方法
【課題】複数の視野に分割された対象を高精度に測定することができるマシンビジョン検査システムおよびその位置測定結果の決定方法を提供する。
【解決手段】マシンビジョン検査システムは、第1動作状態においてスケールベースの測定により第1対象FE1の位置を測定する。第2動作状態では、第1対象から第2対象に至る途中で重複画像CIA〜CICを撮影し、画像相関を利用して重複画像CIA〜CICの相互の画像変位を測定し、第1対象の位置と画像変位のセットとを合わせて第2対象FE2の位置を測定する。
(もっと読む)
柱状物体抽出方法、柱状物体抽出プログラム、及び柱状物体抽出装置
【課題】本願発明の課題は、柱状物体の空間情報を得るためには多くの労力と時間を要する、大量の柱状物体を漏れなく抽出することが難しい、あらかじめ柱状物体を認識しなければならない、といった問題を解決することであり、大量の計測データの中から、正確かつ短時間で、柱状物体を自動抽出する柱状物体抽出方法、柱状物体抽出プログラム、及び柱状物体抽出装置を提供することにある。
【解決手段】本願発明の柱状物体抽出方法は、計測点群から柱状物体を抽出する方法であり、計測点群からそれぞれ独立した領域ごとにセグメントデータを得るセグメンテーション工程と、細線化処理を行うことで立設物形状データを得る細線化工程と、主成分分析を行って固有値から算出される特徴量に基づいて形状分類を与える形状分類工程と、特徴量等に基づいて立設物の柱状判定を行う柱状物体判定工程を備える方法である。
(もっと読む)
貨物自動車寸法測定装置、及び貨物自動車寸法測定方法
【目的】カメラやレーザー等の光学系手段を用いて測定効率の向上に貢献する手段を利用しつつ、さらに測定精度が高く、貨物自動車に関する的確なデータ管理が可能な貨物自動車寸法の測定装置及び測定方法とする。
【構成】貨物自動車の製造施設において、反射部を有するターゲット部と、所定位置に固定でターゲット部に反射される光を出力する複数の光学系手段と、反射光でターゲット部の座標位置を決定して貨物自動車の寸法を算定する制御部がある。ターゲット部の一部は、貨物自動車後方の灯火部に取り付けられている。光学系手段は、灯火部用のターゲット部に光を出力する灯火部用光学系手段を含む。ターゲット部の反射光データは制御部に入力され、貨物自動車の全長、全幅又は全高の少なくとも一つが算定され、灯火部用光学系手段の撮影データに基づいて灯火部の取り付け位置が算定される。
(もっと読む)
シート材端部の観察・評価装置及び方法
【課題】 シート材を高速搬送させても短時間で観察画像を取得することができ、シート材が搬送方向と垂直な方向であって、前記観察部の視野内にある前記シート材の搬送方向と直交する方向(つまり、シート材の厚み方向や幅方向)にバタツキや揺動を生じたとしても、観察画像の品質及び評価の質が損われることを防ぐことができる、シート材端部の観察・評価装置及び方法を提供する。
【解決手段】 観察対象となるシート材の端部を搬送させながら観察し、
観察視野範囲の一部分を観察領域として登録し、当該領域を別個に複数登録でき、当該観察部の外部から複数の部分観察領域を選択するかを指示して、複数登録された中から一つの部分観察領域に切り替える部分観察領域切替機能を有し、
シート端部位置検出器から得られた信号に基づいて観察部に対して部分観察領域が切り替わるように信号出力する、シート材端部の観察評価装置及び方法。
(もっと読む)
高速光学センサ検査システム
【課題】電子部品を、高速に検査する光学システムを提供する。
【解決手段】センサは、カメラのアレイに対してノンストップで移動する加工対象物に関する画像データを取得するように構成されたカメラのアレイを含む。カメラのアレイが画像データを取得するとき照明のパルスを提供するために照明システムが配置されている。少なくともいくらかの画像データは、加工対象物上のスキップマーク又はバーコードに関するデータを含む。又取得した複数の画像により立体画像化する。
(もっと読む)
投影装置およびその方法、並びに投影装置を用いた形状認識装置およびその方法
【課題】配置の制約が少なく、かつ照度不足および照度ムラが生じにくい投影装置を提供する。
【解決手段】撮像部の撮像対象物に対して光を投影する投影装置200であって、放射する光の波長帯が互いに異なる赤色LED240R、緑色LED240Gおよび青色LED240Bと、撮像対象物の特性に基づき、各LEDが放射する光の光量を制御する投影制御部230と、複数のLEDから放射される光を、同一の光軸上に導くことにより、撮像対象物に対して光を投影するリレー部250とを備える。
(もっと読む)
膜厚の検査装置および検査方法
【課題】 曲面を有する膜厚を正確に計測する。
【解決手段】 膜厚の検査装置は、テラヘルツ波を発生させるテラヘルツ波発生器15と、前記テラヘルツ波を、膜が形成された試料に照射させる照射光学系16、17と、前記試料において反射したテラヘルツ波を検出し、検出信号を出力するテラヘルツ波検出器22と、前記試料の反射面の形状情報に基づき、当該反射面から前記テラヘルツ波検出器に至るまでの反射波の電場強度を参照信号として算出し、前記参照信号を用いて前記検出信号を補正する制御装置5を備える。
(もっと読む)
展開図生成装置、展開図生成方法及び展開図表示方法
【課題】トンネルの壁面がどの程度の高さの凹凸を持つかを知ることが可能な技術を提供することを目的とする。
【解決手段】展開図生成装置は、記憶装置1と、変換装置2と、照合装置3と、変位形状生成装置4と、描画装置5とを備える。変換装置2は、壁面42の複数の計測点7を壁面42の展開図に配置する座標変換を行う。変位形状生成装置4は、座標変換された複数の計測点7の座標に基づいて、壁面42の展開平面17に、当該展開平面17に直交する方向の座標wの値を反映した凹凸形状が付与されてなる変位形状41を生成する。描画手段5は、変位形状41に、画像9のパターンを描画する。
(もっと読む)
三次元モデリング装置、三次元モデリング方法、ならびに、プログラム
【課題】精度良く三次元モデルを作成する。
【解決手段】画像受付部11は、被写体を異なる角度から複数回撮像することにより得られる複数の画像の組の入力を受け付ける。三次元モデル生成部12は、受け付けられた複数の画像の組のそれぞれに基づいて、被写体の三次元モデルを複数生成する。三次元モデル選択部13は、被合成三次元モデルと合成三次元モデルとを選択する。特徴点抽出部14は、被合成三次元モデルと合成三次元モデルから、複数の第1特徴点と第2特徴点を抽出する。特徴点選択部15は、抽出された複数の第1特徴点と第2特徴点の中から、ステレオカメラ1との距離が近い特徴点を優先的に選択する。座標変換パラメータ取得部16は、座標変換パラメータを取得する。座標変換部17は、合成三次元モデルの座標を被合成三次元モデルの座標系の座標に変換する。三次元モデル合成部18は、合成三次元モデルを被合成三次元モデルに合成する。
(もっと読む)
周辺監視装置
【課題】簡単な方法で、精度よく他車両の位置を測定することが可能な周辺監視装置を提供する。
【解決手段】他車両22が光を照射することにより路面上に形成された光投影パターンを検出することによって他車両22の位置を測定する周辺監視装置であって、自車両21進行方向の路面上の所定領域を検出領域Rとして、該検出領域Rに、他車22両が路面上の所定の領域に形成した前記光投影パターンを検出する検出手段と、前記検出手段で検出された、自車両21から見た前記光投影パターンに基づいて、自車両21の進行方向に対する他車両22の進行方向の角度を測定する測定手段とを備える。
(もっと読む)
共焦点計測装置
【課題】本発明は、共焦点光学系を利用して計測対象物の変位を計測する共焦点計測装置であって、光の波長による、計測対象物の変位を計測する精度の変動を抑えた共焦点計測装置を提供する。
【解決手段】本発明は、共焦点光学系を利用して計測対象物の変位を計測する共焦点計測装置である。共焦点計測装置100は、白色LED21と、白色LED21から出射する光に、光軸方向に沿って色収差を生じさせる回折レンズ1と、回折レンズ1より計測対象物200側に配置され、回折レンズ1で色収差を生じさせた光を計測対象物200に集光する対物レンズ2と、対物レンズ2で集光した光のうち、計測対象物200において合焦する光を通過させるピンホールと、ピンホールを通過した光の波長を測定する波長測定部とを備えている。回折レンズ1の焦点距離は、回折レンズ1から対物レンズ2までの距離と、対物レンズ2の焦点距離との差より大きい。
(もっと読む)
三次元モデリング装置、三次元モデリング方法、ならびに、プログラム
【課題】ズーム機能を用いた場合であっても、精度よく三次元モデルを作成する。
【解決手段】画像取得部11は、ペア画像を取得する。特徴点対応抽出部12Bは、画像取得部11が取得したペア画像のそれぞれの画像から、特徴点対応の組を抽出する。誤対応除去部12Cは、特徴点対応抽出部12Bによって抽出された特徴点対応の組において、垂直座標の差が所定値以上ある組を誤対応として除去する。第1補正部12Dは、誤対応が除去された後の特徴点対応の組の垂直座標に基づいて、画像取得部11が取得したペア画像を、三次元モデル作成に適した画像に補正する。三次元モデル生成部13は、画像取得部11が取得し、画像補正部12が補正したペア画像から、被写体の三次元モデルを生成する。
(もっと読む)
被計測体の表面異常識別装置
【課題】高温の被計測体に発生する酸化スケール等の表面異常を精度良く識別することができる被計測体の表面異常識別装置を提供する。
【解決手段】高温の被計測体5から得られる輻射光を輻射光撮像部18により、被計測体5が一定角度回転される毎に撮像して得た複数の輻射光画像を合成して、合成輻射光画像を作成する画像合成部10と、前記合成輻射光画像から所定領域を抽出して、撮像中の被計測体5の温度低下に基づく前記所定領域の画像の輝度変化を補正する第1輝度補正部12と、前記補正した所定領域の画像から所定暗部を検出し、該所定領域の画像の暗部を前記被計測体の表面異常と判定する異常判定部14と、を備える被計測体の表面異常識別装置1を用いる。
(もっと読む)
3次元形状測定装置
【課題】チャープ光の長さに依存することなく、奥行きの計測範囲を長くすることができる3次元形状測定装置を提供する。
【解決手段】3次元形状測定装置10は、波長が規則的に経時変化するチャープ光を生成して被測定物Wに対して照射するチャープ機器16と、被測定物Wを反射した反射チャープ光を所定タイミングで所定期間切り出す複数のシャッタ部22a、22b、22cと、複数のシャッタ部22a、22b、22cにより切り出された反射チャープ光と前記複数のシャッタ部22a、22b、22cの位置情報とを用いて、被測定物Wの複数領域の3次元情報を取得する3次元情報取得部26とを備え、複数のシャッタ部22a、22b、22cは、被測定物Wの基準位置に対して距離が異なるように設けられている。
(もっと読む)
金属缶端巻締め外観検査方法、金属缶の外観検査方法、金属缶端巻締め外観検査装置、および容器の口部検査装置
【課題】缶の巻締め部の巻締め厚さを全周にわたって精度よく計測できる金属缶端巻締め外観検査方法を提供する。
【解決手段】外観検査装置を用いた金属缶端巻締め外観検査方法は、巻締め部上方に配設したリング照明装置2からの照明光により巻締め上端両側の反射映像をリング照明装置2の中心と同軸上に配設したカメラ4で撮像し、入力映像をディジタル多階調画像に変換し、巻締め上端両側の二重のリング状画像を得、リング状画像の中心から放射状に二重のリング外側端とリング内側端とのリング幅を適宜な間隔で全周計測し、各リング幅寸法があらかじめ設定した上下限の閾値範囲外のとき、金属缶が不良品であると判別する。
(もっと読む)
3次元形状測定装置
【課題】低コストで複数の被測定物を測定することができる3次元形状測定装置を提供する。
【解決手段】3次元形状測定装置は、非線形媒質30を有し、該非線形媒質30に照射された第1偏光状態の複数の反射チャープ光102、104、106をポンプ光が照射された期間で切り出すシャッタ部を備え、非線形媒質30は、シャッタリング光が照射された期間に照射された反射チャープ光102、104、106の偏光状態を第2偏光状態に変化させるものであり、シャッタ部は、非線形媒質30によって偏光状態が変わった反射チャープ光102、104、106を抽出することで、所定のタイミングで反射チャープ光102、104、106を切り出し、複数の照射装置は、非線形媒質30におけるポンプ光の非線形効果の有効範囲100内に反射チャープ光102、104、106を集光させる。
(もっと読む)
光学式位置検出装置および位置検出システム
【課題】広い範囲にわたって対象物体の位置を光学的に検出することのできる光学式位置検出装置、および位置検出システムを提供すること。
【解決手段】光学式位置検出装置10において、検出用光源部12は、検出光L2の出射強度が出射角度範囲の一方側から他方側に向かって減少する第1点灯動作と、検出光L2の出射強度が出射角度範囲の他方側から一方側に向かって減少する第2点灯動作とを行う。従って、第1点灯動作時における受光部13の受光強度と第2点灯動作時における受光部13の受光強度との比較結果に基づいて検出用光源部12に対する対象物体Obの角度位置(角度θ)を検出でき、検出用光源部12が検出光L2を出射した際の受光部13の受光強度に基づいて検出用光源部12から対象物体Obまでの距離rを検出できる。
(もっと読む)
電磁波イメージング装置
【課題】測定表面が曲面であっても確実にその表面状態をイメージングする。
【解決手段】構造物の曲面に電磁波を複数の送信アンテナからそれぞれ放射する複数の送信回路と、構造物の構造物物の曲面で反射した電磁波を複数の受信アンテナでそれぞれ受信する複数の受信アンテナとを有し、送受信アンテナ13aと送受信回路13bとが一体化された複数のミリ波モジュール13をコンクリートポールCPの曲率に合わせて円弧状にアレイ化して配置する。
(もっと読む)
1 - 20 / 345
[ Back to top ]