
Fターム[2F065HH12]の内容
光学的手段による測長装置 (194,290) | 入射光 (9,091) | 入射方向 (4,392) | 斜め (1,484)
Fターム[2F065HH12]に分類される特許
141 - 160 / 1,484
三次元形状測定装置
【課題】多乱光の影響による三次元形状の測定の誤差を抑制する。
【解決手段】三次元形状測定装置は、投影部と、調整部と、検出部と、制御部とを備える。投影部は、測定対象物に対してパターン光を照射する。調整部は、パターン光の照射強度を調整する。検出部は、パターン光の照射された前記測定対象物の表面の明るさを検出する。制御部は、パターン光を照射しない非照射状態で検出される測定対象物の表面の明るさに基づいて調整部による照射強度の調整を制御する。
(もっと読む)
三次元表面の計測装置及び方法

【課題】光学的フーリエ変換を採用し、CMP用研磨パッドの複雑な表面形状を実時間でそのまま定量的に評価可能にする。
【解決手段】評価すべき三次元の微小凹凸面の上に溶液を介して溶液層定常化基板を載置する。レーザ照射部は、溶液層定常化基板を通して単一波長光のレーザ光を微小凹凸面に照射する。微小凹凸面から散乱及び回折した光を光学的にフーリエ変換したフーリエ変換像をフーリエ変換像取得部で取得する。このフーリエ変換像を、信号変換器により光強度分布として電気信号に光電変換する。この取得した光強度分布の波形を、基本波数及び少なくとも一つの高調波数に分解したそれぞれの波長とその振幅をスペクトル情報として抽出して、三次元の微小凹凸面の形状を評価する。
(もっと読む)
欠陥検査方法および欠陥検査装置
【課題】
従来技術によれば,試料に熱ダメージを与えることなく,短時間で高感度に欠陥検出・寸法算出することが困難であった。
【解決手段】
被検査対象物である試料の表面の領域を所定の照明条件にて照明する照明工程と、該試料を並進および回転させる試料走査工程と、該試料の照明領域から複数の方向に散乱する複数の散乱光のそれぞれを、前記試料走査工程における走査方向および該走査方向と概略直交する方向の各々について複数画素に分割して検出する散乱光検出工程と、前記散乱光検出工程において検出された複数の散乱光のそれぞれについて、該試料の概略同一領域から概略同一方向に散乱した散乱光を加算処理し、該加算処理した散乱光に基づき欠陥の有無を判定し、該判定された欠陥に対応する複数の散乱光のうち少なくとも一の散乱光を用いて該判定された欠陥の寸法を算出する処理工程と、を備える欠陥検査方法である。
(もっと読む)
三次元形状計測装置、部品移載装置および三次元形状計測方法
【課題】ライン状(線状)の撮像領域を用いて移動する計測対象物の撮像を行う際にも、高輝度な照明光を用いることなく明るい画像を取得することが可能な三次元形状計測装置を提供する。
【解決手段】この表面実装機100は、各々がX1方向に並べられるとともにX1方向と直交するY2方向にライン状に延びるライン状撮像領域63a〜63fを含み、部品120を撮像する二次元イメージセンサ63と、二次元イメージセンサ63に対してX1方向に相対的に移動する部品120に向けて正弦波状の光強度分布を有するパターン光Gを投影する照明部61と、二次元イメージセンサ63が、ライン状撮像領域63a〜63fを用いて部品120の領域P1を順次撮像する場合に、領域P1の画像信号を、投影されたパターン光Gが有する周期Lの2分の1の積分範囲dで積算する制御を行う撮像制御部73とを備える。
(もっと読む)
表面形状の評価方法および評価装置
【課題】第1表面に対向する第2表面による反射像の影響を受けずに被評価物体の表面形状を精度よく評価することができるようにする。
【解決手段】評価装置は、評価対象である板ガラスなどの被評価物体3の表面3aに映し出されたストライプパターン1を、CCDカメラ2によって撮像するように構成されている。ストライプパターン1は、光源の発光面に設けられている。また、光源が発射する光の波長は、200〜380nmである。CCDカメラ2によって撮像された画像は、演算装置としてのコンピュータ4に取り込まれ、コンピュータ4によって画像解析が行われる。
(もっと読む)
欠陥検査方法及びその装置
【課題】
複数の方向に配置した複数の検出器からの信号を基板の高さ変動の影響を受けることなく処理して基板上のより微細な欠陥を検出することを可能にする。
【解決手段】
第1の集光検出手段と第2の集光検出手段とにそれぞれ複数列の光センサアレイを有する光電変換器を備え、処理手段は第1及び第2の集光検出手段のそれぞれの複数列の光センサアレイからの検出信号を用いて試料の表面に対する第1及び第2の集光検出手段の焦点位置のずれを求め、この求めた第1及び第2の集光検出手段のそれぞれの焦点位置のずれに応じて第1の集光検出手段から出力された検出信号と第2の集光検出手段から出力された検出信号とを補正し、この補正した第1の集光検出手段から出力された検出信号と第2の集光検出手段から出力された検出信号とを統合して試料上の欠陥を検出するようにした。
(もっと読む)
立体形状認識装置
【課題】認識精度を高く維持しつつ処理を軽くする。
【解決手段】複数方向から照明光を照射する照明手段2と、対象物を撮像する撮像手段1と、これらの制御部120とを備え、照度差ステレオ法を用いて、複数の撮像画像データとそれぞれの照射方向とから撮像画像を構成する画素ごとに法線ベクトルを算出する立体形状認識装置10において、撮像画像を構成するそれぞれの画素について、複数の撮像画像データの同じ位置の画素における複数の輝度値を、予め定めた絞り込み条件に従って絞り込む選出部21と、撮像画像を構成するそれぞれの画素について、選出部により絞り込まれた同じ位置の画素における複数の輝度値に基づいて法線ベクトルを算出する算出部22とを備ている。
(もっと読む)
パターン形成装置、マーク検出装置、露光装置、パターン形成方法、露光方法及びデバイス製造方法
【課題】移動体の位置を高精度に制御しつつ、物体上の複数のマークの検出時間を短縮する。
【解決手段】 露光装置は、ウエハWを保持してXY平面内で移動するとともに、上面にY軸方向を周期方向とする格子を有する一対のYスケール39Y1、39Y2が設けられたウエハステージWSTと、X軸方向に関して検出領域の位置が異なる複数のアライメント系AL1、AL21〜AL24と、X軸方向に関して前記複数の検出領域の両外側に1つずつ配置される一対のYヘッド64y1、64y2を含む複数のYヘッド64を有し、一対のYスケールの少なくとも一方と対向するYヘッドによって、ウエハステージWSTのY軸方向の位置情報を計測するYエンコーダと、を備えている。このため、ウエハステージWSTのY軸方向の移動の際に、ウエハ上の複数のマークを複数のアライメント系で同時に計測可能になる。
(もっと読む)
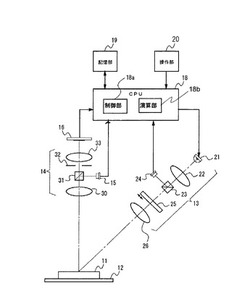
画像認識装置、装着型ロボット、及び画像認識プログラム
【課題】画像認識用のカメラの高さを自動的に検出する。
【解決手段】カメラ位置22には、前方斜め下に向けた画像認識装置用の撮像カメラ5が設置されており、その上方の光源位置21には、撮像カメラ5の画面フレーム31の内部に投影像26を投影する光源装置4が設置されている。装着型ロボットに搭載された画像認識装置は、画面フレーム31の下端と投影像26の下端との距離である投影像オフセットx2を画像データで計測し、投影像オフセットx2とカメラ高さy2を対応させた対応データマップや、あるいは計算によりカメラ高さy2を取得する。このようにして得られたカメラ高さy2は、パラメータとして記憶装置に記憶され、画像認識装置で段差などの認識するのに使用される。
(もっと読む)
外観検査装置及び印刷半田検査装置
【課題】位相シフト法を用いて3次元計測結果の表示が可能で、また2次元計測が可能な外観検査装置及び印刷半田検査装置を提供することにある。
【解決手段】印刷半田検査装置1は、検査対象物100に対し斜め上方であって対向する2方向から位相変化光を照射可能な一対の第1照明装置2と、前記検査対象物に対し上方からRGB光を照射可能な第2照明装置3と、前記検査対象物を白黒画像で撮像可能な撮像装置4と、を備えている。そして、前記検査対象物の同一撮像面に対し前記2方向の位相変化光を照射して撮像し、該撮像の前又は後にて前記検査対象物の同一撮像面に対し前記RGB光を順次照射して撮像し、各画像を合算した画像により前記検査対象物の外観を検査する。
(もっと読む)
表面形状測定方法及び測定装置
【課題】正確性が向上した表面形状測定方法および測定装置を提供する。
【解決手段】このような表面形状測定方法は、少なくとも二以上の方向でパターン光を測定対象物に照射し、測定対象物から反射されたパターンイメージを取得する段階と、前記パターンイメージを用いて前記方向における高さを取得する段階と、前記方向における前記高さの増加率を表すベクトル場を取得する段階と、前記方向における前記高さに対する信頼指数を取得する段階と、前記信頼指数及び前記ベクトル場を用いて、統合ベクトル場を取得する段階及び前記統合ベクトル場を用いて測定対象物の各座標値に対する高さを測定する段階を含む。
(もっと読む)
高さ測定方法および荷電粒子ビーム描画装置
【課題】試料に形成されたパターンに起因する高さ測定誤差を低減して、描画精度の向上を図ることのできる高さ測定方法および荷電粒子ビーム描画装置を提供する。
【解決手段】本発明の一態様によれば、高さ測定方法は、高さの基準となる範囲を決定する工程と、PSDを含むアナログ信号処理回路上でのオフセット値を求める工程と、PSDの出力値からオフセット値を差し引いた値を用いて試料の高さの測定データを求める工程と、試料の高さの測定データの内で基準となる範囲に含まれない値を除き、残った値を用いてフィッティングを行い、試料の高さデータを作成する工程とを有する。
(もっと読む)
ブリッジ接続不良検出方法
【課題】部品のターミナルを短絡させるブリッジを検出することのできるブリッジ接続不良検出方法を提供する。
【解決手段】部品のターミナルの間を短絡させるブリッジ(bridge)を検出するためのブリッジ接続不良検出方法は部品が実装された基板に照射され反射された複数の光を通じて2Dイメージ及び高さ基準情報を獲得する段階と、2Dイメージ及び高さ基準情報のうち少なくとも一つ以上を用いて部品の回転情報を獲得する段階と、回転情報を用いて部品のブリッジ接続不良を検出するための検査領域を設定する段階と、2Dイメージを用いて検査領域内の第1ブリッジ領域を抽出する段階と、高さ基準情報を用いて検査領域内の第2ブリッジ領域を抽出する段階と、第1及び第2ブリッジ領域のうち少なくとも一つ以上を用いて部品のブリッジ接続不良可否を判断する段階と、を含む。
(もっと読む)
高さ測定方法および電子ビーム描画装置
【課題】試料の高さを正確に測定することのできる高さ測定方法と、高さを正確に測定して高い精度で描画することのできる電子ビーム描画装置とを提供する。
【解決手段】光の波長を所定値としたときの反射光の光量を測定し、光量が閾値以下である場合には光の波長を変えて反射光の光量を測定する工程を繰り返し、光量が閾値より大きくなる波長で試料の高さを測定する。あるいは、光の波長を変えて反射光の光量を測定し、光量が最大となる波長で試料の高さを測定する。
(もっと読む)
光学式位置検出装置および位置検出機能付き機器
【課題】少ない数の検出用光源部であっても、広い領域にわたって対象物体の位置を検出することのできる光学式位置検出装置、および位置検出機能付き機器を提供すること。
【解決手段】光学式位置検出装置10は、第1検出用光源部12Aおよび第2検出用光源部12Bから検出光L2を出射し、検出対象空間10Rの対象物体Obで反射した検出光L2の一部を光検出部30で受光して対象物体Obの位置を検出する。第1検出用光源部12Aおよび第2検出用光源部12Bは、検出対象空間10RからX軸方向で離間しており、光検出部30は、検出対象空間10Rから第1検出用光源部12Aおよび第2検出用光源部12BよりY軸方向で離間している。このため、検出光L2が対象物体Obで正反射して光検出部30に入射するような対象物体Obの特異位置を、よりX軸方向の外側にシフトさせることができる。
(もっと読む)
透光性管状物体の厚さ測定装置
【課題】 透光性管状物体の厚さを全域にわたって短時間で精度よく測定する。
【解決手段】 測定用レーザ光をガルバノミラー35で反射させてガラス管Gに照射し、ガラス管Gの外周面で反射する反射光及び内周面で反射する反射光をラインセンサ39で受光し、反射光の受光位置からガラス管Gの厚さを検出する。サーボ用レーザ光源40からのサーボ用レーザ光をガルバノミラー35で反射させて、ガラス管Gにおける測定用レーザ光の照射位置又はその近傍位置にZ軸方向から照射する。フォトディテクタ48でガラス管Gからのサーボ用レーザ光の反射光を受光し、Y軸方向エラー信号生成回路119、Y軸方向サーボ回路120及びY軸方向ドライブ回路121が、モータ36を駆動制御することにより、測定用レーザ光の光軸がガラス管Gの中心軸と交差するようにガルバノミラー35のX軸線周りの回転をサーボ制御する。
(もっと読む)
検査装置
【課題】 基板を検査するにおいての所要される時間を節減することができ、空間を確保することのできる検査装置を提供する。
【解決手段】基板上に形成された測定対象物の良否を判断する検査装置はワークステージ部、光学モジュール及び光学モジュール移送部を含む。光学モジュール移送部は光学モジュールの上部に配置されて光学モジュールと結合され、光学モジュールを移送する。それにより、基板を検査するに所要される時間を節減することができ、空間を確保することができる。
(もっと読む)
半導体計測装置
【課題】測定のスループットが低下するのを防ぎ、測定感度の高い半導体計測装置を提供する。
【解決手段】一定の偏光状態の光を多入射角に分解する第1のレンズ31と、第1のレンズ31から出射される光が計測対象物で反射した、多反射角の反射光を同軸の平行光に変える第2のレンズ32と、第2のレンズ32を透過した光の所定の成分を波長および入射角に対応して分光する分光器40と、分光器40から照射される光の波長および入射角をパラメータとして表される光強度分布を検出して電気信号に変換する2次元検出器50と、2次元検出器50から受信する電気信号に基づく光学パターンを解析し、計測対象物の構造を特定する情報処理装置70と、を有する。
(もっと読む)
スポット溶接検査方法および装置
【課題】広範囲領域でのスポット溶接の有無、およびスポット溶接位置の検査を可能とするスポット溶接検査方法および装置を提供する。
【解決手段】スポット溶接を施した溶接母材に対して斜光を照射する第1の投光機と、上方から溶接母材の画像を取得する撮像機と、第1の投光機および撮像機を搭載し、溶接母材に対する位置調整可能な走査装置と、撮像機からの画像情報を処理する処理装置から構成され、処理装置は、撮像機から得られた3階層レベルの輝度の第1の画像から、中間輝度レベルと中間輝度レベル以外の輝度の2階層レベルの輝度で構成された第2の画像を得、中間輝度レベル以外の輝度の部分をスポット溶接のエッジ部分とする第1の手段、第1の手段によるエッジ部分からスポット溶接の中心位置を決定する第2の手段を備える。
(もっと読む)
球体の位置測定装置及び方法
【課題】円軌道上を公転する球体の位置を好適に測定することができる球体の位置測定装置を提供する。
【解決手段】球体の位置測定装置は、円軌道の中心線O上に中心を有するリング照明18と、前記中心線O上に配置されたレンズ20を有し、前記中心線Oを含む範囲で前記球体13を撮像する撮像部17と、前記撮像部17によって撮像された画像中における、前記球体13の表面で反射した前記リング照明18の反射光を認識し、この反射光の領域の重心位置を求める画像処理部22と、を備える。
(もっと読む)
141 - 160 / 1,484
[ Back to top ]