
Fターム[2F065HH14]の内容
光学的手段による測長装置 (194,290) | 入射光 (9,091) | 入射方向 (4,392) | 複数方向 (691)
Fターム[2F065HH14]に分類される特許
161 - 180 / 691
画像表示装置

【課題】 投射レンズの光軸と、スクリーンの法線の傾きを精度よく検出し、調整者にわかりやすく傾き情報を伝達することができる画像表示装置を得ること。
【解決手段】 画像表示素子と、該画像表示素子により表示された画像をスクリーン上に投射する投射レンズと、該スクリーン上あるいは該スクリーンと同一平面上であって、該投射レンズの光軸と直交する第1方向で該投射レンズの光軸を挟んだ2つの測距点と、該投射レンズの光軸と直交し、該第1方向と直交する第2方向において、前記2つの測距点とは位置が異なる1つの測距点の、少なくとも3つの測距点の距離情報を各々検出する少なくとも3つの距離測定手段と、該3つの距離測定手段で得られる距離情報を表示する表示手段とを備えた画像表示装置であって、該3つの距離測定手段の光軸は、該投射レンズの光軸に対して、同じ角度だけ異なる方向に傾けて配置されていること。
(もっと読む)
研磨された原石のインクルージョンの検出
3Dモデルを生成し、および/またはダイヤモンドのような研磨原石におけるインクルージョンを検出する、方法および機器について示した。原石は、一連の個別の増分で回転される。原石の各回転位置では、原石に平行光が照射され、輪郭画像が記録される。また、原石には、各回転位置で、(更なる回転の前に)拡散光が照射され、拡散画像が記録される。画像は、解析され、原石の表面の3Dモデルが取得される。次に、拡散画像において、特徴物が同定され、これは、後続の拡散画像の間でトラックされる。トラック化特徴物は、原石による光線の反射および屈折を考慮して、原石の3Dモデルに対して配置される。その後、特徴物のいくつかまたは全てがインクルージョンとして同定される。 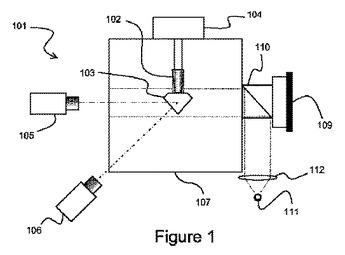 (もっと読む)
(もっと読む)
画像処理方法

【課題】 立体的な対象物の3次元形状を計測する際に問題となる画像中に観測される輝度値の変動領域の判定を行う画像処理方法を提供する。
【解決手段】 画像処理方法は、対象物Qを照射装置F1で照明し、カメラC1によって撮像した2次元画像データFD12を得る第一撮像工程と、同一のカメラC1によって同一の対象物Qを異なる照明位置から照明装置F2で照明して撮像した2次元画像データFD13を得る第二撮像工程とを行い、2次元画像データFD12とFD13とから反射光量による輝度値の差分データを生成し、この差分データの平均値を基準に標準偏差を閾値にして、閾値以上の輝度を示す差分データを対象物Qの画像データの変動領域と判定する抽出工程とを具備し、対象物Qの3次元形状データが正確に生成される効果を奏する。
(もっと読む)
位置検出機能付き投射型表示装置
【課題】検出領域の周りに発光素子や受光素子を多数設けなくても対象物体の位置を検出することのできる位置検出機能付き投射型表示装置を提供すること。
【解決手段】画像投射装置200を備えた投射型表示装置に対して位置検出機能を付加して位置検出機能付き投射型表示装置100を構成するにあたって、検出領域10Rに向けて赤外光からなる位置検出光を出射する位置検出用光源部11を設け、検出領域10Rで対象物体Obにより反射した位置検出光を光検出器30によって検出する。位置検出用光源部11、光検出器30、および位置検出部50はいずれも、画像投射装置200に設けられている。
(もっと読む)
三次元形状計測装置
【課題】部分的に公差の規定の異なる部品の外形寸法の測定を、煩雑な作業を伴うことなく効率的に行う。
【解決手段】測定物の三次元形状測定に関する所定の性能属性がそれぞれ異なる三次元測定部10−1,10−2,10−3と、測定物の測定箇所に対応させて、所定の性能属性に基づいて三次元測定部10−1,10−2,10−3から一の三次元測定部を選択する測定箇所特定部21と、選択された一の三次元測定部に測定物を測定させる測定実行部23とを備えた。
(もっと読む)
距離測定装置、距離測定方法、距離測定プログラム、およびコンピュータ読み取り可能な記録媒体
【課題】ワーク表面に発生したプローブの二次像とプローブの先端部との位置関係から、プローブの先端部とワーク表面との距離を測定する距離測定装置を提供する。
【解決手段】LEDランプ7からプローブ6に光を照射することによりワーク9の表面に現れる二次像とプローブ6とを撮像した画像において、プローブ6のエッジを特定するエッジ特定部101と、二次像の外縁に沿った直線を画像上に挿入する直線挿入部102と、上記エッジと上記直線との重なりを判定する重なり判定部103と、を備え、1以上のLEDランプ7、撮像装置、及びプローブ6が、ワーク9の表面に対して一体に移動可能に保持されている。それゆえ、距離測定装置100は、ワーク9の表面に発生したプローブ6の二次像とプローブ6のエッジとの位置関係から、プローブ6のエッジとワーク9の表面との距離を測定することができる。
(もっと読む)
立体形状測定システム及び立体形状測定方法
【課題】対象物体に動きがある場合であっても測定精度の低下を抑止すること。
【解決手段】投影装置がそれぞれ異なる第一〜第三模様を物体に対して投影する状態で繰り返し遷移し、撮像装置が第一〜第三模様が投影された物体の画像をそれぞれ生成し、立体形状測定装置が各画像において、各ピクセルの輝度値の時間変化を表す波形の位相をピクセル毎に算出し、異なる撮像装置によって撮像された各画像において、各ピクセルの輝度値及び位相に基づいて、物体の三次元空間上の同一点が撮像された画像平面上のピクセルの対応付けを行い、各対応点の画像上の座標に基づいて物体の立体形状を測定する。
(もっと読む)
3次元形状計測装置、3次元形状計測方法
【課題】同一の対象物についてパターン光の投影方向を変えて計測した3次元形状の計測結果を合成する処理の処理負荷を軽減する。
【解決手段】対象物1を撮像する撮像装置3の左右にパターン光を投影する投影装置2をそれぞれ配置する。各投影装置2はそれぞれ縞状のパターン光を対象物1に投影し、対象物1に投影されたパターンを撮像装置3で撮像することにより、位相シフト法で対象物1の3次元形状を計測する。基本演算部13aはパターン光を投影した投影装置2ごとに対象物1の3次元形状を計算する。回転補正部13bは各計測結果の3次元点群データからそれぞれ基準平面を規定し、基準平面の法線ベクトルを用いて回転補正を行う。平行移動部13cは回転補正後の基準平面を平行移動させて重ね合わせる。合成処理部13dは、重ね合わせ後の3次元点群データを用いて3次元形状の計測結果を合成する。
(もっと読む)
むら検査方法及びむら検査装置
【課題】周期性のあるパターンの被検査体に対し、回折光によるコントラストから正常部と変動部とを精度良く識別でき、かつ、モアレのような外乱要素を含まない被検査画像を取得すること。
【解決手段】本発明の実施の形態1に係るむら検査装置は、透過照明部10、X−Y−θステージ部20、アライメント用撮像部30、回折光強度測定部兼撮像部40及び処理・制御部100を具備している。X−Y−θステージ部20は、被検査基板60の位置決め動作及び基板搬送動作が可能である。アライメント用撮像部30は、被検査基板60の位置決めを実施する。回折光強度測定部兼撮像部40は、被検査基板60からの回折光強度を取得し、また、被検査画像取得を実施する。処理・制御部100の情報処理手段101は、透過照明部10、X−Y−θステージ部20、アライメント用撮像部30及び回折光強度測定部兼撮像部40の動作管理及び制御を行う。
(もっと読む)
物品及びその表面の特性を決定するための測定機器及び方法
光学的放射の手段による対象物の表面の特性を決定するための測定機器は、光学的放射源及び測定表面から反射した放射を受信する検出器を具備する。更に、測定デバイスは、放射される光学的放射の処理装置を具備し、それは、光源から放射される光学的放射を、別の波長へ分割し、前述の波長の内、少なくとも最も短い波長及び最も長い波長が、測定表面の法線方向において、測定対象物の異なる半分且つ異なる高さに集中するように、前述の測定対象物への分割された波長を測定表面の通常から異なる方向に向けるように調整される。更に、測定デバイスは、反射光の放射線処理装置を具備し、被測定物から少なくとも鏡面反射の方向に反射光学的放射線を受けるように調整され、測定表面の法線方向とは異なり、受信した光学的放射を前述の検出器へ向ける。更に、測定デバイスは、検出器によって生成された電子シグナルを分析し、そこに集中した放射線の強度に比例し、更に、被測定物の表面の光沢(光沢度)及び/又は厚さ特性を、その波長の強度、測定面に位置する、焦点に基づいて決定するように調整され、波長は鏡面のジオメトリにおいて検出器へのその点から反射された最も強いものであった。 (もっと読む)
磁気ディスクの両面欠陥検査方法及びその装置
【課題】
磁気ディスクの両面を同時に検査することを可能にして、検査のスループットを向上させる。
【解決手段】
磁気ディスクの表面の傷や欠陥を光学的に検出する表面側欠陥検出手段と、磁気ディスクの裏面の傷や欠陥を光学的に検出する裏面側欠陥検出手段とを備えた磁気ディスクの両面欠陥検査装置において、裏面側欠陥検出手段に光路切替え部を設けて、レーザ光源から発射されたレーザを反射してレーザの光路を磁気ディスクの裏面の方向に切替えるとともにフレネルレンズで集光された散乱光を反射して集光された散乱光の光路を第1の光電変換器の方向に切替えるようにして、磁気ディスクの裏面側の狭い空間でも光学的に欠陥を検出することを可能にした。
(もっと読む)
画像処理方法
【課題】 光沢をもつ物体の三次元形状を計測する際に問題となる画像中に観測される正反射領域の判定を行う画像処理方法を提供する。
【解決手段】 制御部11が対象物Qを撮像した2次元画像データ中において正反射領域に相当する輝度の閾値を示す対象領域を抽出する第一検出工程と、第一検出工程によって対象領域が検出された時に、照明装置F1、F2の初期露光時間を所定の割合で短縮した露光時間で対象物を照明して撮像した比較2次元画像データ中において正反射領域に相当する閾値を抽出する第二検出工程とを行う。正反射領域判定部13は、比較2次元画像データ中に正反射領域に相当する閾値が検出されなかった時に、露光時間が2分の1より短い場合は、その比較2次元画像データの対象領域を正反射領域と判定する。よって、2次元画像データ中の正反射領域が正確に抽出可能になる効果を奏する。
(もっと読む)
光学式タッチ制御システム及びその方法
【課題】光学式タッチ制御システムおよびその方法を提供する。
【解決手段】光学式タッチ制御システムにおいて、少なくとも1つの光学反射体および複数の画像取得モジュールを座標検出区域の側面周辺に配置する。各複数の画像取得モジュール組において、1つの画像取得モジュールおよび1つの第1発光モジュールを有する。また、座標検出区域の周辺に第2発光モジュールを追設する。第1時点にて、複数の第1発光モジュールを制御し発光させると共に、それぞれの複数の画像取得モジュールを制御し第1画像を取得する。第2時点にて、第1発光モジュールに代わって、第2発光モジュールを制御し発光をさせると共に、それぞれの複数の画像取得モジュールを制御し第2画像を取得する。本発明の光学式タッチ制御システムによれば、少なくとも1つの物体が第1画像と第2画像との位置に基づいて、この少なくとも1つの物体が座標検出区域内の座標値を算出することができる。
(もっと読む)
高速三次元計測装置及び高速三次元計測方法
【課題】被測定物の見かけの形状をできるだけ歪ませることなく形状計測できると共に、長い物や連続的に移動する物であっても形状計測できる高速三次元計測装置を提供する。
【解決手段】高速三次元計測装置は、被測定物の上に、一つの方向に沿って光強度が周期的に変化する縞状パターン光を照射するパターン光源と、前記被測定物からの前記縞状パターン光の反射光を前記一つの方向に沿ったラインについて一組の光信号として取り込むラインカメラと、取り込んだ一組の前記光信号について、前記縞状パターン光との関係に基づいて前記被測定物の高さを算出する計測部と、を備える。
(もっと読む)
高速高解像度三次元太陽電池検査システム
光学検査システム及び方法が提供される。加工対象物輸送機構が加工対象物(12)をノンストップで移動させる。照明装置(40)が、ライトパイプを含み、第一及び第二のストロボ照明野タイプを提供するように構成されている。第一(3)及び第二(5)のカメラ(2)アレイが、加工対象物(12)の立体画像化を提供するために配設されている。第一のカメラアレイ(3)は、第一の照明野を用いて加工対象物(12)の第一の複数の画像を生成し、第二の照明野を用いて加工対象物(12)の第二の複数の画像を生成するように構成されている。第二のカメラアレイ(5)は、第一の照明野を用いて加工対象物(12)の第三の複数の画像を生成し、第二の照明野を用いて加工対象物(12)の第四の複数の画像を生成するように構成されている。処理装置が、第一、第二、第三及び第四の複数の画像の少なくともいくつかを記憶し、他の装置に提供する。 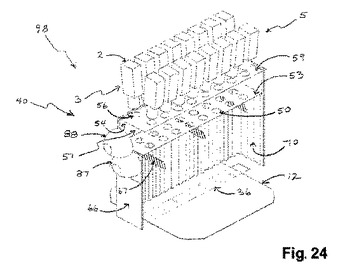 (もっと読む)
(もっと読む)
光学式位置検出装置、光学式位置検出装置の校正方法、および位置検出機能付き表示装置
【課題】複数の位置検出用光源から出射された位置検出光の強度分布を利用して位置検出を行なう場合でも、複数の位置検出用光源の全てに対して出射光量の校正を行なうことのできる光学式位置検出装置、光学式位置検出装置の校正方法、および光学式位置検出装置を備えた位置検出機能付き表示装置を提供すること。
【解決手段】光学式位置検出装置10では、検出領域10Rに形成した位置検出光の強度分布を利用して対象物体Obの位置を検出することから、位置検出用光源12A〜12Dの出射光量の校正を行なう。かかる校正の際、位置検出用光源12B、12Dは、光検出器15が位置する側とは反対の第2方向Y2に発光部121が向いている。そこで、第1補助光源12Vおよび第2補助光源12Wから出射された光の検出結果に基づいて、位置検出用光源12B、12Dのみを点灯させた状態での出射光量の校正を行なう。
(もっと読む)
移動環境認識装置及び方法
【課題】移動体の移動対象を簡易に測定する。
【解決手段】円錐検出光DETと測定対象の表面S2との交点TRからの反射光に基づいてセンサ原点Oから測定対象S2までの距離を測定し、当該測定結果から得た交円TRの特徴量によって測定対象表面S2の形状を求めるようにしたことにより、円錐検出光DETの立体的な構成を利用して測定対象S2の形状を簡便かつ確実に測定することができる。
(もっと読む)
アライメント方法とその装置
【課題】位置合わせする物体に凹凸があっても、正確な位置合わせをする。
【解決手段】第1の光源5からレンズ1を透過させて光検出器3に第1の光線5aを照射する。この第1の光線5aを照射された光検出器3を第1の撮像手段6で撮像する。第1の撮像手段6により撮像した光検出器3の位置を記憶手段9aで記憶する。第2の光源7からレンズ1の光軸に対して傾けた位置からレンズ1に向けて第2の光線7aを照射する。この第2の光線7aを照射されたレンズ1を第2の撮像手段8で撮像する。第2の撮像手段8により撮像した結果から検出手段9bがレンズ1の凹凸面の中心位置を検出する。この検出手段9bにより検出したレンズ1の位置が記憶手段9aに記憶させた光検出器3の位置に合致するよう、位置制御手段9がレンズ1と光検出器3を位置合わせする。
【効果】凹凸があって検出が困難な光学素子の位置合わせを、精度良く行うことができる。
(もっと読む)
連続多波長表面スキャンを用いて表面レイヤ厚さを決定する方法および装置
【課題】複数の画像データから高精細な画像を表す高精細画像データを生成する高精細画像生成処理において、生成する高精細画像の出力時における画質の低下が抑制されるような画像データを生成することを可能とする。
【解決手段】画像生成装置は、生成する高精細画像データの出力に用いる出力装置に関する情報を出力装置情報として取得し、出力装置情報に基づいて出力装置での出力に適した高精細画像の画像サイズを生成画像サイズとして設定する生成画像サイズ設定部を備える。また画像生成装置は、複数の画像データから、時系列に並んだ複数の画像データを合成元画像データとして取得し、取得した合成元画像データを合成して、設定した生成画像サイズの高精細画像を表す高精細画像データを生成する画像合成部を備える。
(もっと読む)
タイヤ外観検査装置
【課題】画像処理手段が、複数の照射手段から照射されるスリット光のずれを自動で検出してタイヤの外観検査を行うことができるタイヤ外観検査装置を提供する。
【解決手段】複数のスリット光の端部を互いに重ね合わせて直線状にスリット光をタイヤ表面に照射し、このタイヤ表面を撮像して得られた撮像画像を画像処理手段に出力してタイヤ表面の良否を検査するタイヤ外観検査装置であって、画像処理手段が、撮像画像を互いに均等な複数の領域に分割する分割手段と、複数の領域の輝度の標準偏差値を算出し、撮像画像を領域毎の輝度の標準偏差値により表わされたプロファイル画像に変換するプロファイル画像作成手段と、プロファイル画像における複数の領域のうち、閾値以上の輝度の標準偏差値を有する領域が周方向に連続しているかを判定するずれ判定手段とを備えるようにした。
(もっと読む)
161 - 180 / 691
[ Back to top ]