
Fターム[2F065JJ01]の内容
光学的手段による測長装置 (194,290) | 受光部 (23,546) | 点検出 (798)
Fターム[2F065JJ01]に分類される特許
141 - 160 / 798
3次元形状測定装置
【課題】焦点位置を高速に移動させることなく、測定対象物の表面に形成されるレーザ光の照射スポットを小さく保つことができる3次元形状測定装置を提供する。
【解決手段】
レーザ光を出射するレーザ光源10と前記レーザ光を反射して走査するミラー30を設ける。レーザ光源10とミラー30の間にスポット形成器20を設ける。スポット形成器20は、前記レーザ光を平行光に変換するコリメートレンズ22、前記平行光をリング状の輪帯光に変換するフィルタ23、前記輪帯光を集光する第1リレーレンズ24及び第2リレーレンズ25を備える。さらに、測定した測定対象物までの距離の平均値を算出して、前記算出した平均値に応じてスポット形成器20を前記レーザ光の光軸方向に移動させる移動装置20aを設ける。
(もっと読む)
膜厚測定方法及びその装置

【課題】高精度に膜厚を測定することを可能にした膜厚測定方法及びその装置を提供する。
【解決手段】分光スペクトル情報を信号処理して膜厚を推定する膜厚測定方法において、
検量線作成用分光スペクトル情報を基底分解し、その基底に掛かる第1の係数を分光スペクトル情報の代表値として求め、第1の係数と分光スペクトル情報に対応した膜厚データとから重回帰係数を求める工程と、測定対象物の分光スペクトル情報と基底とに基づいて基底に掛かる第2の係数を求め、第2の係数と重回帰係数とに基づいて測定対象物の膜厚を推定する工程とを備える。
(もっと読む)
位置センサ及びリソグラフィ装置
【課題】コンパクトなユニット内に組み込むことができ、複数の自由度の位置測定値を提供できる位置センサを提供する。
【解決手段】位置センサは、ターゲットの位置データを測定するように構成される。位置センサは、放射ビームを照射するように構成された放射源と、放射ビームを第1の回折方向に少なくとも1つの1次放射ビームに回折するように構成された第1の格子と、1次回折ビームの光路内に配置され、第1の格子で回折された1次回折ビームを、第1の回折方向に実質的に垂直な第2の回折方向に回折するように構成された第2の格子とを含む。第2の格子はターゲットに接続される。第1の検出器は、第1の格子によって回折されたビームの少なくとも一部を検出するように構成され、少なくとも1つの第2の検出器は第1の格子と第2の格子によって回折されたビームの少なくとも一部を検出するように構成される。
(もっと読む)
光学式位置検出装置、電子機器及び表示装置
【課題】対象物の位置に応じて効率良く位置検出ができる光学式位置検出装置、電子機器及び表示装置等を提供すること。
【解決手段】光学式位置検出装置は、X−Y平面に沿って設定される検出エリアRDETに照射光LTを出射する光出射部EUと、検出エリアRDETにおいて照射光LTが対象物OBに反射したことによる反射光LRを受光する受光部RUと、受光部RUの受光結果に基づいて、対象物OBの位置情報を検出する検出部50とを含む。光学式位置検出装置は、X−Y平面に直交するZ軸での対象物OBのZ座標位置に応じて、対象物OBの位置情報の検出精度を異ならせる。
(もっと読む)
地形データの取得方法
【課題】レーザレーダを用いて監視領域の物体を検知するのに用いる監視領域の地形データを、監視領域が広い場合であっても精度よく取得できるようにすること。
【解決手段】侵入物体Sが存在しない状態で監視領域Aの地面Lを、表面に高反射率の反射材をコーティングした反射シートRで覆い、その状態で走査光により監視領域Aの地面Lを走査して、反射シートRの表面からの反射光を受光する。これにより、地面Lを直接走査光で走査する場合に比べて反射光の受光強度を高くする。よって、走査光の入射が浅くなって反射光の強度が微弱となる遠方の監視領域Aについても、反射率のよい反射シートRからの反射光に基づいて、監視領域Aの地面Lの地形データを精度よく取得することができる。
(もっと読む)
光学式位置検出装置および位置検出機能付き表示装置
【課題】対象物体で反射した光を受光して対象物体の位置を検出する際、対象物体に反射率が異なる箇所が存在していても、対象物体の位置を高い精度で検出することのできる光学式位置検出装置、および位置検出機能付き表示装置を提供すること。
【解決手段】光学式位置検出装置10では、複数の検出用光源12を順次点灯させて検出光L2を出射させ、検出空間10Rに位置する対象物体Obにより反射した検出光L3の一部を光検出器30により受光する。検出用光源12A〜12Dにおいて、第1発光素子12A1〜12D1と第2発光素子12A2〜12D2とは、互いに異なる帯域にピークを有する第1検出光L2a1〜L2d1、および第2検出光L2a2〜L2d2を異なるタイミングで出射する。そして、光検出器30での第1検出光L2a1〜L2d1の検出強度と第2検出光L2a2〜L2d2の検出強度との差に基づいて対象物体Obの位置を検出する。
(もっと読む)
光学式位置検出装置および位置検出方法
【課題】検出用光源から出射された検出光の一部が対象物体で反射せずに光検出器に入射
することに起因する検出誤差を解消することのできる光学式位置検出装置を提供すること
。
【解決手段】光学式位置検出装置10は、検出光L2を出射する複数の検出用光源12、
および対象物体Obで反射した検出光を受光する光検出器30に加えて、検出空間10R
を経由せずに光検出器30に入射する参照光Lrを出射する参照用光源12Rを有する。
検出空間10Rに対象物体Obが存在する状態で、複数の検出用光源12の一部を点灯さ
せる第1検出用光源点灯動作、他の一部を点灯させる第2検出用光源点灯動作、および参
照用光源点灯動作を行うとともに、検出空間10Rに対象物体Obが存在しない状態でも
第1検出用光源点灯動作、第2検出用光源点灯動作および参照用光源点灯動作を行なう。
(もっと読む)
車形検出装置及び同装置を備えた洗車機
【課題】本発明の課題は、洗浄による飛散水や湯気の発生あるいは素子の汚れ等によって光量が不足した場合であっても、車形データを作成することができる車形検出装置及びこの装置を備えた洗車機を提供するものである。
【解決手段】発光部5aにおける隣接する2つの発光素子La・La+1を同時に発光させ、その一方の発光素子Laと水平に対向する1つの受光素子Raで受光する第1の光軸Bdと、同じく2つの発光素子La・La+1を同時に発光させ、その他方の発光素子La+1のと水平に対向する1つの受光素子Ra+1で受光する第2の光軸Beとを形成し、各素子毎に各光軸で車体検出する強光検出モードを実行可能にした。
(もっと読む)
光学式位置検出装置
【課題】対象物体で反射した光を光検出器で検出する方式を採用した場合において、検出空間の全体にわたって対象物体の位置を高い精度で検出することのできる光学式位置検出装置を提供すること。
【解決手段】光学式位置検出装置10では、複数の検出用光源12を順次点灯させて検出光L2を出射させ、検出空間10Rに位置する対象物体Obにより反射した光L3の一部を光検出器30により受光した結果に基づいて対象物体Obの位置を検出する。Z軸方向からみたとき、光検出器30に近い位置にある検出用光源12B、12Dから出射された検出光L2b、L2dは、検出光L2a、L2cに比して導光板13から検出空間10Rに到達するまでの減衰度合いが大である。従って、対象物体Obと光検出器30との距離に起因する減衰度合いの差は、検出空間10RにおけるY軸方向の一方側Y1と他方側Y2とにおける強度差によって相殺される。
(もっと読む)
光機能素子及びそれを用いた光波長検出器
【課題】光通信等の高速変調に対応した高速の光波長検出器を低コストで実現することができる光機能素子を提供する。
【解決手段】光機能素子1は、石英基板等からなる透光性基板2と、透光性基板2の一方の面に形成された、直線状の溝3aと凸状部3bとからなる凹凸パターン3と、凹凸パターン3上に形成された金属パターンとを備えている。金属パターン4の各パターンは、透光性基板2の前記一方の面の法線方向から見た場合に、直線状パターンとなっている。そして、金属パターン4の各直線状パターンは、凹凸パターン3の直線状の溝3a又は凸状部3bに対して略45度だけずれた状態となっている。
(もっと読む)
インクジェット装置
【課題】温度変化等によって生じる基板の走査中の真直度ずれやヨーイングによるずれを補正し、基板の所定の位置に常に正確にインクを塗布することのできるインクジェット装置を提供すること。
【解決手段】基板の両側に付与されたスケールパターンを2個の第1センサで読み取り、位置演算部が位相差をゼロにするようθ軸搬送部を補正することにより、ヨーイングによるズレを抑制する。同様に、基板の両側に付与された直線パターンを2個の第2センサで読み取り、位置演算部が走査中の平均値の変動がゼロになるようY軸搬送部を補正する。更に、第1センサからの信号でインクジェット制御部のインク吐出タイミングの補正を行い、温度変化でヘッドユニットと基板の相対位置がずれた場合でも、正確にインクを基板の所定の位置に着弾させることができ、混色や輝度ばらつきなどの少ないデバイスを製作できる。
(もっと読む)
光ポテンショメータ及びマニピュレータ
【課題】例えばマニピュレータを構成する径が細い管状の細径管の内部にも配設可能な光ポテンショメータ、及び該光ポテンショメータを具備するマニピュレータを提供すること。
【解決手段】一端が閉じられた金属パイプ114と、金属パイプ114に対して入れ子構造の関係を有し、金属パイプ114をその長手方向に移動可能に案内する金属パイプ112と、金属パイプ114内部に光を供給する光源122及び光ファイバ118と、金属パイプ114内部からの反射光量の変化を検出する光パワーメータ124と、を光ポテンショメータに具備させる。金属パイプ114は、その長手方向に沿ってスリット132を備え、光パワーメータ124は、金属パイプ114の長手方向における移動に伴って生じるスリット132の開口量の変化に起因する金属パイプ114内部からの反射光量の変化を検出する。
(もっと読む)
光学式変位検出機構のスポット光の位置合わせ方法およびそれを用いた走査型プローブ顕微鏡
【課題】 光源からの光を測定対象や光検出器の受光面へ位置合わせを行う際に、位置合わせを容易に、かつ確実に行うことが可能な光学式変位検出機構のスポット光の位置合わせ方法を提供する。
【解決手段】 測定対象となるカンチレバー6に光を照射する光源10と、光源10を駆動する光源駆動回路21と、光源10からカンチレバー6に照射した後の光を受光し、光強度を検出する光検出器16と、光検出器16の検出信号を所定の利得で増幅する増幅器22から構成される光学式変位検出機構において、光検出器16で検出される検出感度を利得(増幅率)調整器を用いて実際に測定対象を測定する時よりも小さい値に設定して、光検出器16の所定の位置に光検出器用位置決め機構18により光のスポット20の位置決めを行うようにした。
(もっと読む)
区画線検出装置および区画線検出方法
【課題】電磁波を送受信した結果に基づき区画線の検出を行う装置において、検出精度を向上させる。
【解決手段】近距離スキャンの1ライン分の測定データ(強度データ,距離データ,スキャン角度)を読み込み、読み込んだ強度データ列および距離データ列のそれぞれを微分することで、微分強度データ列および微分距離データ列を求める(S110〜S120)。微分強度データ列において正レベル,負レベルが連続し且つヌルレベルに挟まれた領域を候補範囲として抽出し(S130)、その抽出した候補範囲の中から、微分距離データ列の極性が、候補範囲に対応する部位で正,負,正(第1スキャン領域の場合)、又は負,正,負(第1スキャン領域の場合)と変化するものを、区画線からの反射が得られた対象領域として抽出する(S140)。
(もっと読む)
距離測定装置及びプロジェクタ
【課題】 正確な距離測定が可能であって測定可能な距離の範囲が広く、又機構の調整を容易に行える距離測定装置と、該距離測定装置を備えたプロジェクタを提供する。
【解決手段】 プロジェクタは、光源装置と、当該光源装置からの光を表示素子に導光する光源側光学系と、表示素子と、該表示素子から射出された画像をスクリーンに投影する投影側光学系と、距離測定装置1とを備え、光源装置や表示素子を制御するプロジェクタ制御手段を有しているものである。そして、この距離測定装置1は、レーザー光を測距対象に照射するレーザー発光器2と、測距対象からの反射光を集光する受光レンズ4と、この受光レンズ4を透過した測距対象からの反射光を受光する受光素子3と、を有し、レーザー発光器2からの射出レーザー光の光軸位置に受光レンズ4の受光領域を位置させているものである。
(もっと読む)
円筒面の形状計測方法
【課題】レーザ走査干渉を用いて円筒面の形状を簡単に、かつ、短時間で測定することができ、同時に円筒面の表面画像を得ることのできる、円筒面の形状計測方法を提供する。
【解決手段】テレセントリックfθレンズ8の焦点面近傍に近接配置した参照平面9a及び被観察円筒面10aからの反射光を前記テレセントリックfθレンズ8により平行光束に変換し、結像レンズ11によって集光してテレセントリックfθレンズ8の焦点面と共役の位置に設置したピンホール12aを通過させ、ピンホール12aを通過した反射光の光量を受光素子13で計測する。レーザ光源1からのレーザ光を連続点灯又はパルス点灯させるとともに、走査光を被観察円筒面10aの母線に沿って走査させ、かつ、被観察円筒面10aを有する被測定物10をその円筒軸10bを中心に回転させながら計測する。
(もっと読む)
光学式センサー装置
【課題】検出光が対象物体で反射した光を受光した結果に基づいて対象物体の傾きを検出
することのできる光学式センサー装置を提供すること。
【解決手段】光学式センサー装置10において、検出用光源12が検出光L2を出射した
際に対象物体Obで反射した検出光を光検出器30で検出して対象物体Obの座標を検出
する。光源駆動部14は、複数の検出用光源12を第1出射強度をもって順次点灯させる
第1モード、および複数の検出用光源12を第1出射強度よりも大の第2出射強度をもっ
て順次点灯させる第2モードを行ない、その間、光検出器30は、対象物体Obで反射し
た検出光L3を受光する。従って、監視部50は、対象物体Obの異なる範囲で反射した
検出光L3の2つの受光結果を用いて対象物体Obの傾きを検出することができる。
(もっと読む)
光学式位置検出装置
【課題】検出光の出射空間のサイズを可変にすることのできる光学式位置検出装置を提供
すること。
【解決手段】光学式位置検出装置10Aにおいて、検出用光源部12が検出光L2を出射
した際に対象物体Obで反射した検出光を光検出器30で検出して対象物体Obの座標を
検出する。第1検出用光源部12A〜第4検出用光源部12Dは、第1発光素子12A1
、12B1、12C1、12D1〜第3発光素子12A3、12B3、12C3、12D3を備
えている。対象物体Obの検出空間10Rを広く設定する場合には、点灯する発光素子の
数を増やして出射空間を広げる一方、対象物体Obの検出空間10Rを狭く設定する場合
には、点灯する発光素子の数を減らして出射空間を狭める。
(もっと読む)
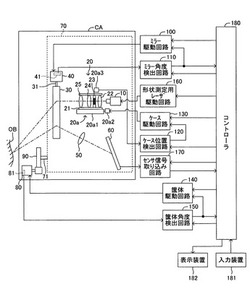
3次元形状測定装置
【課題】 規格内の大きさの受光センサを用いても、受光センサを大きくした場合と同じように、3次元形状の測定可能範囲が大きいか、又は分解能を高くする。
【解決手段】 レーザ光照射器から測定対象物(OB)の表面にレーザ光を照射し、測定対象物OBの表面の照射スポット位置にて発生する散乱光の一部である反射光を集光レンズ32で集光するとともに、集光された反射光をダイクロイックミラー30で互いに異なる少なくとも第1方向及び第2方向に分離する。分離された反射光を、複数の受光素子からなる受光センサ14,24でそれぞれ受光する。受光センサ14,24は、レーザ出射器からの距離が異なる測定対象物OBの表面からの反射光をそれぞれ受光するとともに、一部距離を重複させる。受光センサ14,24による受光信号を用いて、3角測量法の原理に基づいてレーザ光照射器から測定対象物OBの表面までの距離を計算する。
(もっと読む)
方向検出装置
【課題】移動体の進行方向を、簡易な構成で検出する方向検出装置を提供する。
【解決手段】投光部2を間に挟んで受光部3,4を配置して、受光部3,4が移動体10の有無を示すON/OFF出力を行う。方向判定部6が、受光部3,4のON/OFF出力の経時変化に基づいて、移動体10の進行方向が受光部3から受光部4の方向か、又は受光部4から受光部3の方向かを1次元で検出する。
(もっと読む)
141 - 160 / 798
[ Back to top ]