
Fターム[2F065JJ01]の内容
光学的手段による測長装置 (194,290) | 受光部 (23,546) | 点検出 (798)
Fターム[2F065JJ01]に分類される特許
101 - 120 / 798
ブラッグ波長推定方法及びその装置
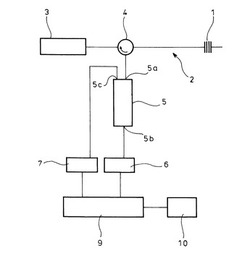
【課題】ブラッグ波長の推定誤差を低減し、且つR値−波長特性を容易に校正することを目的とする。
【解決手段】FBGセンサ部1を含む光ファイバ2と、広帯域光源3と、光サーキュレータ4と、光学フィルタ5と、第一の光電変換器6と、第二の光電変換器7と、第一の出力電圧(VT)及び第二の出力電圧(VR)により無次元量のR値を算出する処理部9と、予め取得したR値と−ブラッグ波長特性を用いてFBGセンサのブラッグ波長を推定する波長推定部10とを備え、
処理部は、光学フィルタ5の波長における透過率(PTx)と、第一の光電変換器6の波長において正規化された第一の光電変換特性(LET)との積、及び光学フィルタ5の波長における反射率(PRx)と、第二の光電変換器7の波長において正規化された第二の光電変換特性(LER)との積を用いてR値−ブラッグ波長特性を求めるように構成される。
(もっと読む)
光学式検出装置、電子機器及び光学式検出方法

【課題】対象物の位置情報を演算し、対象物のZ位置情報に応じて、コマンド処理とホバリング処理とを適切に切り替えることが可能な光学式検出装置、電子機器及び光学式検出方法を提供すること。
【解決手段】光学式検出装置は、面状領域に沿う領域に照射光を照射する照射部と、対象物に反射した照射光の反射光を受光する第1及び第2の受光部と、第1及び第2の受光部の少なくとも一方の受光結果に基づいて、対象物の位置情報を演算する演算部と、を備え、第1の受光部と面状領域との距離は、第2の受光部と面状領域との距離よりも小さく、第1及び第2の受光部は、面状領域に沿う方向から入射する反射光を受光する。
(もっと読む)
印刷はんだ検査装置および印刷はんだ検査方法
【課題】プリント板上の測定しようとするはんだ箇所に対し、高さの基準となる基準面を設定し、その基準面に対するはんだの高さを求めるときに、部品実装後のプリント板を分割するために加工された分割用加工部の影響を受けないようにする技術を提供する。
【解決手段】変位センサがはんだが印刷されたプリント板を光学的に計測し、このプリント板の高さの変位を示す変位情報を出力し、分割ライン決定部がプリント板を分割するための分割用加工部を変位情報に基づき検出し、プリント板の分割ラインを分割ライン情報として出力する。基準面算出領域設定手段は、分割ライン情報を受け分割ラインの内側の領域内に基準面算出領域を設定し、基準面算出手段が基準面算出領域内の変位情報に基づいて、基準面算出領域に形成される平面を基準面として設定する。変位測定部は、はんだ箇所のはんだの高さを、はんだ箇所の変位情報と設定された基準面とから算出する。
(もっと読む)
測長装置
【課題】干渉計を利用した測長において、環境変動により測定光路上の光学窓の厚みが変動しても影響の小さい測長装置を提供する。
【解決手段】測定光路上に、内部が真空で両端に光学窓10b、10cを有する真空管10を配置する。各光学窓10b、10cは、厚みが異なる2つの部分を有する構成とする。各光学窓10b、10cの厚みが異なる部位へ2本の測長レーザ2a、2bの測定光を入射させ、測定ミラー5でそれぞれ反射させて、参照ミラー6による参照光と干渉させる。測長レーザ2a、2bによる2つの測長値を用いて、環境変動に起因する光学窓10b、10cの厚み変化による光路長変動の影響を除去した測長を行うことができる。
(もっと読む)
パターンの形成された基板の粗さを得る方法、パターンの形成された基板の粗さを得るための装置
【課題】パターン付きウェハの表面粗さを高精度で非破壊に測定できる平坦な検査範囲を、目視によらず探索できる表面検査装置を提供する。
【解決手段】照射される照射光により生じる散乱光の散乱光強度を、パターン付きウェハ200上の測定座標に対応付けて測定し、ウェハ200の表面粗さを検査する表面検査装置において、制御部が、下限閾値以上である散乱光強度の測定座標を抽出し、抽出された測定座標の周辺に相当するパターンの全体レイアウト401の一部の部分レイアウト405a内に、表面粗さの検査の検査範囲406を設定し、検査範囲406における表面粗さを求める。
(もっと読む)
リソグラフィ装置の位置決めシステムおよび方法
【課題】 位置決めの正確さおよび/または強健性が改善されたリソグラフィ投影装置のアライメント・システムを提供する。
【解決手段】 リソグラフィ装置の位置決めシステムは、位置決め放射線源1、第1検出器チャネルおよび第2検出器チャネルを有する検出システム、および検出システムと連絡する位置決定ユニットを有する。位置決定ユニットは、第1および第2検出器チャネルからの情報を組み合わせて処理し、組み合わせた情報に基づいて、第2オブジェクト上の基準位置に対する第1オブジェクト上の位置決めマークの位置を決定する。
(もっと読む)
レーザ光の光軸方向の測定方法、長さ測定システム、および位置決め精度の検査方法
【課題】ターゲットの位置決め範囲が従来より狭く、かつ、測定光の光軸が固定されたレーザ干渉計であっても、測定光の光軸方向を測定可能な方法を提供すること。
【解決手段】レーザ干渉計104と再帰反射体106とハンドリング装置102を有する測定システム100を用いる。レーザ干渉計104は、測定光を再帰反射体106に照射し、その反射光と参照光との干渉光強度を検出する。ハンドリング装置102は、再帰反射体106を測定位置まで移動して位置座標情報を検出する。まず、レーザ干渉計104が干渉光を検出でき、かつ同一平面上に存在しない少なくとも4つの測定位置piを選ぶ。再帰反射体106を各測定位置piに移動させて、その位置座標情報を検出する。レーザ干渉計104が再帰反射体106までの距離の変化量を測定する。各測定位置の位置座標情報と各距離の変化量に基づき測定光のベクトル情報 a を算出する。
(もっと読む)
レーザ画像計測装置
【課題】環境変化に左右されない正確な測距値を取得可能なレーザ画像計測装置を得る。
【解決手段】レーザ光の発振時間と反射光の受光時間との時間差に基づき対象物までの距離を導出するために、基準となる変調信号Mを生成する基準信号発生部20と、変調信号Mにより変調されたレーザ光を出射するレーザ光送信部30と、レーザ光を走査して整形された送信ビームLを出射するレーザ光走査部40と、反射光を受信信号に変換する受信部50と、レーザ光走査部40内のレーザ光走査光学系5から基準固定距離に設置されて送信ビームLが照射される基準反射板6と、受信信号から基準反射板6および対象物の距離値Dzを導出する信号処理部60と、を備える。レーザ光走査部40および受信部50は、基準反射板6からの反射光を、対象物に対する距離測定と同一の光路で送受信する。信号処理部60は、基準反射板6の距離変動量ΔDzから、対象物の距離値を補正する。
(もっと読む)
光学情報処理装置、光学情報処理方法、光学情報処理システム、光学情報処理プログラム
【課題】レーザースキャナを用いた得た三次元点群位置データを補完する三次元点群位置データを撮影画像から得る技術において、当該撮影を行う条件における撮影手段のキャリブレーションを効率よく簡便に行う。
【解決手段】第1の視点から建物120のレーザースキャンを行い、三次元点群位置データを得る。他方で、第2の視点から第1の視点でオクルージョンとなる建物120の部分のステレオペア画像の撮影を行う。そして、第2の視点で得たステレオ画像と第1の視点で得た三次元点群位置データとの対応関係を求めることで、当該三次元点群位置データを利用してのステレオペア画像撮影装置124のキャリブレーションを行なう。
(もっと読む)
光電センサ
【課題】光格子の解像度を改良すること。
【解決手段】相互に平行な監視ビーム18の場20を互いの間に形成する複数の光送信器14及び受光器26を備え、光送信器14及び受光器26にビーム成形光学系16、24が割り当てられる、光電センサ10の光学系16、24は、場20に対して斜め方向、特に垂直方向における該光学系16、24の相互重複をもたらす幾何学形状及び配置を含む。
(もっと読む)
変位計測装置
【課題】クロストークによる検出誤差を軽減し、移動体の高帯域速度変動を高精度に検出することができる変位計測装置を得る。
【解決手段】移動体に設けた光学的に識別可能なマークを照明する第1の発光部と前記マークを介した光を検出する第1の受光部とを備える第1の検出部と、前記第1の検出部に対して前記移動体の移動方向に所定の間隔を隔てて配置され、前記マークを照明する第2の発光部と前記マークを介した光を検出する第2の受光部とを備える第2の検出部と、前記第1の発光部と、前記第2の発光部を時分割で発光させる時分割発光手段と、前記マークのうち同一のマークを前記第1、第2の検出部で各々検出する第1のタイミングと前記第1のタイミングと異なる第2のタイミングを検出する検出手段と、前記検出手段で得られた前記第1のタイミング及び前記第2のタイミングを用いて前記移動体の移動速度を算出する速度算出手段と、を有する。
(もっと読む)
3次元形状測定装置
【課題】出射光学系の部品の取り付け角度がずれたとき、出射光学系から出射されるレーザ光の光軸方向のずれを相殺するように出射光学系に入射するレーザ光の光軸の方向を調整することができる3次元形状測定装置を提供する。
【解決手段】レーザ光を出射するレーザ光源10とレーザ光を走査する第1ミラー16との間に、直交する2つの回転軸回りに回転可能に支持されたミラー14aを設ける。測定対象物OBからの反射光を受光して受光位置に応じた信号を出力する第1受光センサ24と、第1受光センサ24にて反射した反射光を受光して受光位置に応じた信号を出力する第2受光センサ26を設ける。3次元カメラCAと測定対象物OBが所定の位置関係になるようにセットし、反射光が第2受光センサ26の所定の範囲内にて受光されるように、ミラー14aを回転させる。
(もっと読む)
鋼管の水圧試験機及び鋼管水圧試験後の管長計測方法
【課題】水圧試験機の一連の試験工程の中に検尺機能を付加することにより、次工程条件の最適化に反映させることを可能にする。
【解決手段】水圧試験時の両ヘッド部1,2の移動距離をパルスジェネレータ方式で計測可能とし、各ヘッド部に前記鋼管の管端位置を検出するためのレーザ式位置センサ41,42を設置し、鋼管3のセット前に各ヘッド部を移動させてそのレーザ式位置センサのレーザ光路を所定の原点に一致させ、その時点から、水圧試験を経て各ヘッド部を鋼管から離間させる際に各レーザ式位置センサが鋼管の管端位置を検出した時点まで、各ヘッド部の移動距離を計測し、この計測結果を用いて鋼管の管長を算出する。
(もっと読む)
検査装置
【課題】ウェーハ上の欠陥分布を検査する表面検査装置において、欠陥検査と同時進行でウェーハの厚さとフラットネスを測定できるようにする。
【解決手段】本発明は、ウェーハを固定し、回転及び直線移動を行う搬送系と、前記直線移動の経路上に配置されたウェーハ上の欠陥の位置とサイズを特定する散乱光学系と、前記直線移動の経路であって、前記散乱光学系よりも前に配置されたフラットネス測定系と、を有することを特徴とする。
(もっと読む)
可動物体の位置を決定するためのシステムおよび方法、全般照明LEDの配置および可動物体の位置決定のための光センサ
【課題】LEDによる単純でコスト効率のよい可動物体の位置決めシステムを提供する。
【解決手段】移動物体の位置を決定するシステムは少なくとも3つの全般照明LEDを有する配置であって、そこにおいて、全般照明LEDのそれぞれは、それぞれ送信時間情報およびトランスミッタ情報を有する1つの光信号を送信するために実装され、そこにおいて、信号伝送のための全般照明LEDの波長範囲は、重なり、そこにおいて、前記トランスミッタ情報は、少なくともそれぞれの全般照明LEDの位置の決定を可能にし、さらに、送信時間情報は、それぞれの信号が送信された時点に関する情報である、配置と、移動物体に取り付けられ、さらに、光信号を受信しさらにそれぞれ1つの信号受信時間を割り当てるために実装される光センサと、トランスミッタ情報、送信時間情報および受信時間情報に基づいて物体の位置を決定するために実装される評価ユニットとを含む。
(もっと読む)
内燃機関用構造体、位置検知機構付き内燃機関、および液体状態検知機構付き内燃機関
【課題】 中空部の状態を基体外部から直接確認することができる内燃機関用構造体を提供する。
【解決手段】 中空部を備え、前記中空部で生じる爆発に応じて前記中空部内を運動する運動体が収容される基体と、前記基体に設けられた、前記基体の外側から前記中空部に入射する光、および前記基体の外側から前記中空部に出射する光を透過する窓部材とを備え、前記窓部材が、サファイア単結晶からなることを特徴とする内燃機関用構造体を提供する。
(もっと読む)
基板の粗さを得る方法、及び基板の粗さを得るための装置
【課題】基板の粗さを得る方法、及び基板の粗さを得るための装置において、ウェハ加工途中の微細な凹凸のパターンを有するパターン付きウェハの表面粗さを測定することを可能にすることで、ウェハ間の膜厚や膜質のばらつきによる歩留まりを向上させることを目的とする。
【解決手段】基板に形成されたパターンに関する設計情報を得る第1のステップと、前記設計情報を用いて、前記基板の表面粗さを得ることができる表面粗さ測定領域を得る第2のステップとを有する基板の粗さを得る方法、及び基板の粗さを得るための装置である。
(もっと読む)
複層塗膜の非接触非破壊評価方法及びそれを用いた装置
【課題】複層塗膜の内部構造及び内部欠陥を、非接触非破壊且つ簡便に測定、解析することができる複層塗膜の非接触非破壊評価方法及びそれを用いた装置を提供すること。
【解決手段】本評価方法は、光源1からの光を参照光と複層塗膜4への入射光とに分岐する分岐ステップと、前記参照光の光学距離を調整する調整ステップと、前記複層塗膜からの反射光と前記参照光とを干渉せしめる干渉ステップと、前記複層塗膜からの前記反射光を含む干渉光を検出して前記干渉光の強度信号を出力する検出ステップと、前記強度信号を解析する解析ステップと、を含む。
(もっと読む)
干渉法の原理を用いたたわみ測定機器
【課題】評価ユニットとたわみボディとの間に生じるノイズの影響を受けにくい、光ファイバー手段を用いた干渉法原理による、たわみ測定機器を提供すること。
【解決手段】第1の光ファイバー手段と第2の光ファイバー手段は、たわみボディにのみ配置されており、第1の光ファイバー手段および/または第2の光ファイバー手段は入力側で、ビーム源を備えた唯一の光供給ファイバーと接続されており、第1の光ファイバー手段および/または第2の光ファイバー手段は出力側で、評価回路を備えた唯一の光評価ファイバーと接続されている。
(もっと読む)
面位置検出装置、露光装置、および露光方法
【課題】反射面を通過した光束に発生する偏光成分による相対的な位置ずれなどの影響を実質的に受けることなく、被検面の面位置を高精度に検出することのできる面位置検出装置。
【解決手段】投射系は、第1反射面7b,7cを有する投射側プリズム部材7を備えている。受光系は、投射側プリズム部材に対応するように配置された第2反射面8b,8cを有する受光側プリズム部材8を備えている。第1反射面および第2反射面を通過した光束の偏光成分による相対的な位置ずれを補償するための位置ずれ補償部材をさらに備えている。
(もっと読む)
101 - 120 / 798
[ Back to top ]