
Fターム[2F065JJ05]の内容
光学的手段による測長装置 (194,290) | 受光部 (23,546) | 複数の受光部 (2,728)
Fターム[2F065JJ05]に分類される特許
61 - 80 / 2,728
車載用カメラ
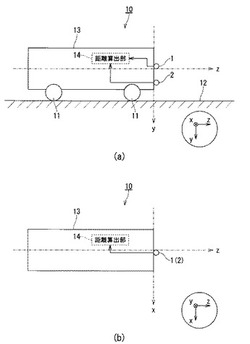
【課題】ローリングシャッタ法で駆動される2台の車載用カメラであって、車両から対象物までの距離を正確に測定することができる車載用カメラを提供する。
【解決手段】本発明の一実施形態に係る車載用カメラは、行列に配置された撮像素子を有し、隣接する行間のシャッタ時間に所定のずれ時間を有しつつ先頭行から最終行に向かって順次シャッタを切るXYアドレス読み出し法で駆動される2台の車載用カメラであって、2台の車載用カメラの中心を結ぶカメラ間中心線が路面となす角が垂直となるように、かつそれぞれの撮像素子の行方向がカメラ間中心線に平行となるとともにそれぞれの先頭行から最終行への向きが一致するように、車両に配置されるものである。
(もっと読む)
露光装置及びデバイス製造方法

【課題】 遮光位置のずれを低減する技術の提供。
【解決手段】 原版を光で照明する照明系、前記原版のパターンの像を基板に投影する投影系を有する光学系を備える露光装置で、前記光学系の光路上の前記投影系の物体面と共役な面かその近傍に配置され、前記像が前記基板上に投影される領域の外縁の一部を円弧状に規定する円弧状部を有する遮光板と、前記光学系の光路に沿った回転軸まわりに前記遮光板を回転駆動する回転駆動部と、前記回転軸と交わる方向に前記遮光板をシフトするシフト駆動部と、前記回転駆動部により前記遮光板を回転駆動させ、前記光学系により前記像を前記基板に投影する際の基準となる基準軸と前記回転軸との相対位置の情報を取得する取得部と、前記基板の周辺部に対して前記像を投影する場合、取得した前記相対位置に関する情報に基づき、前記遮光板が所定の位置になるように前記回転駆動部と前記シフト駆動部を制御する制御部を有する。
(もっと読む)
プロキシミティ露光装置、プロキシミティ露光装置の基板位置決め方法、及び表示用パネル基板の製造方法
【課題】経年変化に伴ってレーザー測長系のレーザー光源の出力特性が変化しても、移動ステージの位置を精度良く検出して、基板の位置決めを精度良く行う。
【解決手段】移動ステージに複数の反射手段34a,34b,35を取り付け、複数のレーザー干渉計32a,32b,33により、レーザー光源31a,31bからのレーザー光と各反射手段34a,34b,35により反射されたレーザー光との干渉を複数箇所で測定する。各レーザー干渉計32a,32b,33の測定結果から、移動ステージの位置を検出し、検出結果に基づき、移動ステージによりチャック10a,10bを移動して、基板1の位置決めを行う。各レーザー干渉計32a,32b,33が受光したレーザー光の強度の変化を検出し、検出したレーザー光の強度の変化を補う様に、レーザー光源31a,31bへ供給する駆動電流を制御する。
(もっと読む)
形状測定装置、形状測定方法、構造物製造システム及び構造物の製造方法
【課題】測定対象物の形状を高精度で測定できる形状測定装置、形状測定方法、及び構造物の製造方法を提供すること。
【解決手段】被測定物に所定の光量分布を有するパターン光を形成する照明部と、光が被測定物に照射される照射方向と異なる方向から被測定物に照射されたパターン光の像を撮像する撮像素子を含む撮像部と、像の撮像信号を評価する評価部と、評価部の評価結果に基づき撮像部の撮像結果に対して所定の処理を行うことで被測定物の位置情報を算出する処理部と、を備える形状測定装置に関する。
(もっと読む)
パターンの描画条件導出方法及びパターン描画装置
【課題】パターンのムラ欠陥の生じない描画条件を導出し、製品の歩留まりを向上する。
【解決手段】基板上に描画するパターンのムラ欠陥が発生しない描画条件を導出する方法であって、基板上に形成するパターンを生成するパターン情報生成工程S1と、パターンに対して、複数の描画項目の組み合わせによる、2通り以上の描画条件を設定する描画条件設定工程S2と、前記生成されたパターンを抜き取り、補助基板上に、前記各描画条件のもとに、矩形領域をなす補助パターンを形成する補助パターン描画工程S3と、補助基板に対して照明光を入射し、補助パターンから生じる回折光を光電変換素子にて画像として取得し、ムラ欠陥に関するムラ評価値とムラ発生周期とを求めことにより、複数の描画条件の中からムラ欠陥が生じない描画条件を導出する描画条件判定工程S4とを含むパターンの描画条件導出方法である。
(もっと読む)
変位検出警報システム
【課題】風や反射光などの外乱の影響による誤検出を低減させ正確な変位量を検出することができる、安価で高精度な変位検出警報システムを提供すること。
【解決手段】再帰反射材を用いた1枚のターゲットに対して、異なる方向から複数の変位検出装置によって撮影することで、昼夜問わず外乱による誤検出を低減させることができる。さらに、変位検出装置で撮影した画像データと過去の計測データと気象データを統合することにより、気温の変化によるターゲットもしくは変位検出装置の変形や、両方の変形、降雨や風による変位の誤検出が発生しやすい場合でも、高確率で正しい判定が可能になる。また、各変位検出装置でデータを分散して保存することにより、変位検出装置が最後の1台になっても、計測を継続することが可能である。
(もっと読む)
プロキシミティ露光装置、プロキシミティ露光装置の基板位置決め方法、及び表示用パネル基板の製造方法
【課題】安価な構成で、チャックのθ方向の傾きを精度良く検出して、基板のθ方向の位置決めを精度良く行う。
【解決手段】第1のステージに搭載されY方向(又はX方向)へ移動する第2のステージに第2の反射手段(35)を取り付け、第2の反射手段(35)のθ方向の位置ずれを検出する。チャック(10a,10b)に複数の光学式変位計(41)を設け、複数の光学式変位計(41)により、第2のステージに取り付けた第2の反射手段(35)までの距離を複数箇所で測定する。第2の反射手段のθ方向の位置ずれの検出結果に基づき、複数の光学式変位計(41)の測定結果から、チャック(10a,10b)のθ方向の傾きを検出し、検出結果に基づき、第3のステージによりチャック(10a,10b)をθ方向へ回転して、基板(1)のθ方向の位置決めを行う。
(もっと読む)
車両周辺情報提供システム及びその方法
【課題】道路の地面と周辺移動物体に対する正確な位置情報が得られる車両周辺情報提供システム及びその方法を提供する。
【解決手段】この車両周辺情報提供システムは、予め定めた間隔で車両に設けられる複数の映像獲得部と、映像獲得部のうち少なくとも二つ以上を選択し、選択された映像獲得部から映像データを受信する映像獲得部選択器と、映像獲得部選択器から受信した映像データから障害物認識及び位置を算出し、車両の車速情報に従い映像獲得部のうち少なくとも二つ以上の映像獲得部を選択するように映像獲得部選択器を制御する制御部と、を含んで構成される。
(もっと読む)
空中写真画像データの対応点設定方法及び対応点設定装置並びに対応点設定プログラム
【課題】空中写真画像データ同士の対応点を精度良く自動で設定することを可能にする空中写真画像データの対応点設定方法及び対応点設定装置並びに対応点設定プログラムを提供する。
【解決手段】第1空中写真画像データ及び第2空中写真画像データの共通特徴点の座標位置及び外部標定要素から三角測量の原理に基づいて共通特徴点の3次元空間における座標位置を算出し、このときの座標位置が第3空中写真画像データに投影される投影位置を算出し、投影位置を含む探索領域を第3空中写真画像データに設定し、探索領域に対して共通特徴点でパターンマッチングし、マッチング率が閾値以上で最も高いときの座標位置から投影位置までの誤差ベクトルを算出し、誤差ベクトルのうち最も多く頻出する最頻誤差ベクトルを検出し、誤差ベクトルが最頻誤差ベクトルとなる位置の投影位置に最頻誤差ベクトルを加えた位置を共通特徴点に対応する対応点に設定するようにした。
(もっと読む)
タービン組立静止部品の位置計測装置
【課題】熟練者でなくても容易迅速にタービン組立静止部品の位置を計測する装置を提供する。
【解決手段】位置計測装置は、タービンの回転中心に沿ってレーザー光21を出射するレーザー光源部1と、レーザー光の光軸に対して45度の傾斜角度で配置され、上記出射レーザー光の一部を90度の角度で反射してタービンの静止部品11に照射する反射鏡兼透過鏡33と、この鏡を透過したレーザー光を受光する第1の受光器34と、上記静止部品に照射されて反射し上記反射鏡兼透過鏡を透過したレーザー光を受光する第2の受光器35と、上記反射鏡兼透過鏡と第1の受光器と第2の受光器とを収容する筺体31と、受信信号を演算してレーザー光源部から静止部品までの回転中心に沿う距離と上記回転中心から静止部品表面までの距離を演算する制御演算装置2とを備え、上記筺体がタービンの回転中心周りに回転自在に構成されている。
(もっと読む)
測定装置
【課題】加工面と加工工具のように、対象物体面に目的物体の先端を精度良く位置決めする位置検出装置を提供する。
【解決手段】対象物体面上の所望の位置に光源光束を合焦させて、その合焦点に目的物体先端を近づけたときに生じる反射光の強度変化と反射光束の光線方向分布の変化を検出し、目的物体を対象物体面に関して高い分解能で接近させ位置決めする。
(もっと読む)
マーカ、マーカ検出方法および装置
【課題】対象物が太陽光で照らされた屋外のように、多様性や変化に富んだ環境下において、画像中の対象物を10画素以下の少ない画素から、誤認することなく検出することができるマーカ、マーカ検出方法および装置を提供する。
【解決手段】対象物1の表面に取り付けたマーカ10であって、乱反射材からなる内層12と、内層の外側に取り付けられた偏光フィルムからなる外層14とを有し、外光2を乱反射し、地表に対し水平、垂直、又は斜めの偏光3に変換して放射する。
(もっと読む)
点状対象物の3次元位置決め用の顕微鏡装置および顕微鏡法
【課題】点状対象物の3次元位置決め用の顕微鏡装置と顕微鏡法を提供する。
【解決手段】顕微鏡装置には、点状対象物を、焦点配光40、40’の形態で2つの別個の画像空間に結像する2つの結像光学系26、26’と、且つそれぞれの画像空間で配置された検出面27、27’の検出点にて、分析可能な光点を捕捉する2つの検出ユニット28、28’と、2つの検出面27、27’の検出点を相互にペアで対応させ、且つ2つの光点を分析することによって点状対象物の横方向x−y位置および軸方向z位置を確認する評価ユニットと、が含まれる。2つの結像光学系には、それぞれの検出ユニットの検出面に垂直な検出軸に対して、それぞれの焦点配光を斜めに向ける光学手段が含まれる。2つの焦点配光の傾斜が相互に反対であることにより、点状対象物のz位置の変化に応じて2つの光点が、反対方向にシフトする。
(もっと読む)
計測装置および計測方法
【課題】高精度に被検面と参照面の間の絶対距離を計測可能な計測装置および計測方法を提供する。
【解決手段】第1の基準波長λ1と第2の基準波長λ2との間で波長走査が可能な光源11と、第3の基準波長λ3の光を射出する光源10を有する光波干渉計測装置は、各波長に対応した干渉光の信号に基づいて被検面と参照面との間の光路長に相当する位相の誤差を補正し、誤差が補正された位相に基づいて被検面と参照面の間の絶対距離を算出する処理部19を有する。
(もっと読む)
露光装置及び露光方法、並びにデバイス製造方法
【課題】ステージを正確に2次元駆動する。
【解決手段】 XエンコーダとYエンコーダとを少なくとも各1つ含む3つのエンコーダを用いて、ステージWSTの移動面内の位置情報を計測する。ステージWSTの位置計測値に基づいて、位置計測に用いるエンコーダを、エンコーダEnc1,Enc2及びEnc3から、エンコーダEnc4,Enc2及びEnc3に切り換える。切り換えの際、座標つなぎ法又は位相つなぎ法を適宜切り換えて適用して、新たに使用するエンコーダEnc4の初期値を設定する。それにより、ステージWSTの位置計測に用いるエンコーダが逐次切り換えられるにもかかわらず、切り換えの前後でステージの位置計測値が保存され、ステージを正確に2次元駆動することができる。
(もっと読む)
カメラ状態測定装置およびカメラ状態測定方法
【課題】ステレオカメラの設置状態を、簡単にかつ精度良く測定することができるカメラ状態測定装置を提供すること。
【解決手段】カメラ状態測定装置100は、ステレオカメラの設置状態に関し、ステレオカメラの撮影画像から、特徴点を抽出する特徴点検出部130と、特徴点検出部130で検出された特徴点のうち、基準面上に位置する2点の指定をユーザから受け付ける計測点指定部150と、上記2点についての対カメラ距離d1、d2を取得する対カメラ距離測定部180と、上記2点にいての対カメラ角θ1、θ2を取得する対カメラ角測定部190と、上記d1、d2、θ1、θ2に基づいて、ピッチ角θ0を算出するピッチ角計算部200と、上記d1、d2、θ1、θ2、θ0に基づいて、カメラ高さhを算出するカメラ高さ計算部210とを有する。
(もっと読む)
3次元物体位置検出装置、そのプログラム
【課題】3次元辞書データから、対象物に関して測定されない領域に該当するデータを除去することで、高精度・高速な照合・認識を実現する。
【解決手段】概要姿勢の推定を行い(S3)、3次元辞書データを概要姿勢に応じて姿勢変換して、「概要変換後の3次元辞書データP’」を作成する(S4)。続いて「概要変換後の3次元辞書データP’」の点群を、測定器から対象物への距離方向と垂直な仮想平面へ投影する(S5)。そして、仮想平面を多数の矩形領域に分割し、各矩形領域毎に、その矩形領域に属する(投影された)複数の点のなかから測定器に最も近い点のみを選択し、選択された点のみから構成される3次元辞書データを再構築することにより、3次元辞書データから対象物に関して測定されない領域に該当するデータを除去する(S6)。
(もっと読む)
厚さ測定装置
【課題】貼合わせウェハ全体について厚さを測定できる装置の提供。
【解決手段】貼合わせウェハ1の厚さ測定光学系及び観察光学系と、測定光学系から出力される信号を用いて貼合わせウェハ1の厚さを算出する信号処理装置とを具え、測定光学系は、第1の波長域の測定用光源30と、この測定光を投射して光スポットを形成する対物レンズ17と、その反射光の光検出手段40とを有し、観察光学系は、前記第1の波長域とは異なる第2の波長域の観察用照明光を放出する照明光源41と、照明光を投射する対物レンズ17と、その反射光を受光して2次元画像を撮像する撮像装置48とを有する。これらで共通の対物レンズ17と測定光源及び観察光源との間の光路中には、前記測定光学系と観察光学系とを光学的に結合する波長選択性を有するカップリング素子34を配置する。撮像装置48は、前記測定光により形成された光スポットの像が重畳された像を撮像する。
(もっと読む)
画像処理装置およびその制御方法
【課題】 複数の視点から撮像した画像に基づいて、より広範囲における任意の被写体の位置情報を取得する。
【解決手段】 上記課題を解決するために、本発明の画像処理装置は、第一の画像と、前記第一の画像とは異なる視点から撮像した第二の画像とを取得する取得手段と、前記第一の画像および前記第二の画像それぞれにおける被写体の特徴点を検出する検出手段と、前記第一の画像および前記第二の画像に基づいて、前記被写体の位置情報を算出する算出手段とを有し、 前記算出手段は、前記第一の画像および前記第二の画像の両方において前記特徴点が検出された場合、前記特徴点それぞれに基づいて、前記位置情報および前記被写体に対応する被写体モデルを算出し、前記第一の画像および前記第二の画像のいずれかのみにおいて前記特徴点が検出された場合は、前記被写体モデルを参照して、前記情報を算出することを特徴とする。
(もっと読む)
ワーク位置検出システム
【課題】透明体であるワークの安定的な位置を検出することができるワーク位置検出システムを提供する。
【解決手段】透明体であるワークの端面が発光するように光を照射する少なくとも一つの投光部(21a〜21c)と、光によってワークの端面に生じた発光箇所を撮像する撮像部(22a、22b)と、撮像部による撮像結果に基づいてワークの位置を検出する検出部と、を有する。
(もっと読む)
61 - 80 / 2,728
[ Back to top ]