
Fターム[2F065JJ05]の内容
光学的手段による測長装置 (194,290) | 受光部 (23,546) | 複数の受光部 (2,728)
Fターム[2F065JJ05]に分類される特許
141 - 160 / 2,728
指示部材、光学式位置検出装置、および入力機能付き表示システム
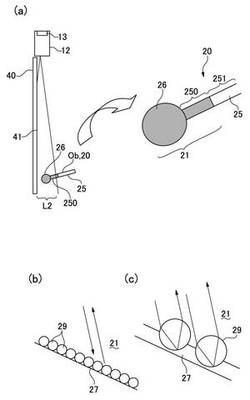
【課題】姿勢や位置にかかわらず、指示部材、該指示部材を検出対象物体とする光学式位置検出装置、および当該位置検出装置を備えた入力機能付き表示システムを提供すること。
【解決手段】指示部材20は、光学式位置検出装置において検出対象物体とされる部材であり、丸棒状の軸部25と、軸部25の先端に設けられた球体部26とを備えている。指示部材20は、球体部26の外周面、および軸部25において球体部26に接続された軸端部250の外周面が再帰反射部21になっており、軸端部250に対して基端側に接続された部分251は、赤外光を吸収する光吸収部になっている。
(もっと読む)
外径測定装置及びこれを用いた外径測定方法

【課題】ホース用継手金具の軸心方向任意位置における外径を迅速かつ高精度に測定する。
【解決手段】外径測定装置1は、ブレーキホース用継手金具30の軸心C1方向と直交する直径方向に互いに対向して配設される一対の二次元レーザ式第1変位センサ6と、ブレーキホース用継手金具30の形状を測定する二次元レーザ式第2変位センサと、ブレーキホース用継手金具30を軸心C1方向に移動させるマイクロメータヘッド8(移動手段)と、を備える。一対の二次元レーザ式第1変位センサ6は、軸心C1方向に直交する平面である第1平面における、ブレーキホース用継手金具30の形状及び外径寸法を測定可能である。二次元レーザ式第2変位センサ7は、ブレーキホース用継手金具30の軸心C1を含む平面である第2平面における、ブレーキホース用継手金具30の形状を測定可能である。
(もっと読む)
形状測定装置、及び形状測定方法
【課題】試料を詳細かつ適切に評価することができる形状測定装置、及び形状測定方法を提供する。
【解決手段】本発明の一態様にかかる形状測定装置は、観察窓51と、基板54とを有する試料保持ユニット11と、観察窓51又は基板54を介して、試料53を加圧するシリンダ56、57と、試料51の形状を測定するため試料51を照明するとともに、照明光の焦点位置を光軸方向に走査可能な共焦点光学系30と、共焦点光学系30を介して、試料保持ユニット11に保持された試料からの反射光を検出するラインセンサ15〜17と、焦点位置を光軸方向に走査した時での検出結果によって、形状を測定する処理部18と、を備え、観察窓51の表面51aに焦点位置を合わせて、観察窓51の表面形状を測定するものである。
(もっと読む)
斜入射干渉計
【課題】測定範囲を拡大できるとともに機器の簡略化が可能な斜入射干渉計を提供すること。
【解決手段】光源41と、光源41からの原光を分割する光束分割部と、測定光を被測定物Wに照射する照射部43と、測定光と参照光とを合成する光束合成部44と、合成された光束を受光する受光部45とを有する斜入射干渉計1において、干渉計本体30と、被測定物Wを保持する基台10と、干渉計本体30を被測定物Wに沿って移動可能な移動機構20と、干渉計本体30の移動軸線の延長上に配置された補助反射鏡51と、光源41からの原光から補助光を分割して補助反射鏡51に照射する補助光束分割部52と、干渉計本体に設置されかつ補助反射鏡51で反射された補助光を受光する補助受光部55と、を有することを特徴とする。
(もっと読む)
表示装置、電子機器、およびプログラム
【課題】互いに異なる複数の面に表示部を有する場合であっても、それぞれの表示部の表示面に対面する複数の方向に位置する操作者に応じて適切な制御をすることができる表示装置を提供する。
【解決手段】表示装置は、互いに表裏の位置関係に表示面が配置されている第1表示部および第2表示部と、第1表示部または第2表示部の表示面に対する操作者の相対位置を検出し、検出した相対位置に基づいて、第1表示部および第2表示部のうち、操作者に対面する表示部の表示面が表面であると検出するとともに、他方の表示部の表示面が裏面であると検出する検出部と、検出部により検出された結果に基づいて、表面の表示部または裏面の表示部の表示を制御する制御部と、を備える。
(もっと読む)
路面画像処理システム及び路面画像処理方法
【課題】ラインカメラの画像からラインカメラの視野範囲が移動した軌跡を特定し、路面全体の画像を正確に生成することが可能な技術を提供する。
【解決手段】本発明の路面画像処理システムは、車両と、車両に搭載されており、一方向に長い第1視野範囲内の路面を撮影する第1ラインカメラと、車両に搭載されており、一方向に長く、第1視野範囲と交差する第2視野範囲内の路面を撮影する第2ラインカメラと、車両の走行距離に応じて第1ラインカメラと第2ラインカメラに繰り返し撮影を指示する手段と、第1ラインカメラが撮影した画像系列にアフィン変換を施した画像と、第2ラインカメラが撮影した画像系列にアフィン変換を施した画像について、最も高い一致度を与えるアフィン変換パラメータを探索する手段と、探索されたアフィン変換パラメータに基づいて、第1視野範囲と第2視野範囲が交差する点の進行方向を算出する手段を備えている。
(もっと読む)
光学式位置検出装置および入力機能付き表示システム
【課題】対象物体からの反射光を複数の受光素子で受光した際に各受光素子からの出力レベルの高低にかかわらず、対象物体の位置を精度よく検出することができる光学式位置検出装置、および入力機能付き表示システムを提供すること。
【解決手段】光学式位置検出装置10では、光源部12から検出光を出射した際、受光部13は対象物体Obからの反射光を第1受光素子131および第2受光素子132で受光する。信号処理部71は、第1受光素子131および第2受光素子132から出力された信号を加算した加算信号を位置検出部50に検出用信号として出力する際、加算出力が閾値以下のときには加算出力に第1倍率を乗じたレベルの信号を検出用信号として出力し、加算出力が閾値を超えるときには加算出力に第1倍率より小さな第2倍率を乗じたレベルの信号を検出用信号として出力する。
(もっと読む)
画像処理装置、画像処理方法および画像処理プログラム
【課題】種々の撮影対象について、ステレオマッチングにおける誤対応をより正確に検出することが可能な画像処理装置、画像処理方法および画像処理プログラムを提供する
【解決手段】画像処理装置201は、撮影対象を異なる方向から撮影して得られた複数の画像について、複数の画像間における画素の対応付けを行なうことにより視差を算出するためのステレオマッチング部10と、ステレオマッチング部10によって算出された視差に基づいて、画像における各画素の位置を3次元座標系における3次元座標に変換するための3次元座標計算部20と、3次元座標計算部20によって変換された各画素の3次元座標に基づいて、ステレオマッチング部10によって行われた対応付けの誤りを検出するための誤対応検出部30とを備える。
(もっと読む)
光源装置、光学式位置検出装置、および入力機能付き表示システム
【課題】光軸方向に交差する方向に配列した複数の発光素子から光軸方向と配列方向とによって規定される仮想面に沿って光を出射した場合でも、発光素子の配列方向で光強度が急激に変化しない光源装置、光学式位置検出装置、および入力機能付き表示システムを提供すること。
【解決手段】光学式位置検出装置10に用いた光源部12(光源装置)では、複数の発光素子120を発光素子120の光軸に交差する方向に配列したため、光軸方向と配列方向とによって規定されるXY面(仮想面)に沿う広い範囲にわたって検出光L2を十分な強度をもって出射することができる。複数の発光素子120の光軸方向の出射側には、レンズフィルム190(シート状光学部材)が配置されており、かかるレンズフィルム190は、XY面内方向における発光素子120からの出射光L1の発散角を拡大させるパワーを備え、Z軸方向には光を拡散させるパワーを有していない。
(もっと読む)
画像処理装置、そのプログラム、および画像処理方法
【課題】ブロックマッチングにより探索される対応点の信頼度を改善する。
【解決手段】画像処理装置は、第1画像上に予め設定された注目点を空間的に内包する第1基準ブロックと、第2画像上に設定された複数の第1参照ブロックのそれぞれとの画像内容の類似度をそれぞれ表現した複数の第1指標値を取得する第1演算部と、該複数の第1指標値に基づいて、注目点に対応した対応点の複数の候補点を前記第2画像においてそれぞれ抽出する抽出部と、複数の候補点をそれぞれ空間的に内包する複数の第2基準ブロックのそれぞれと、第1画像上の第2参照ブロックとの第2ブロックマッチングにより、複数の候補点のそれぞれについて、対応点としての選択の適性を表現した複数の第2指標値を取得する第2演算部と、該複数の第2指標値に基づいて、複数の候補点の中から1つを選択することにより、対応点を決定する決定部とを備える。
(もっと読む)
対象物検出装置
【課題】対象物検出装置は、画像に所定の対象物が含まれていることを検出するために、一定の処理量が必要となるパターン認識処理を行う。このパターン認識処理に必要となる処理量は、従来の対象物検出装置において比較的大規模なものとなっている。よって、このパターン認識処理における処理量を削減したいという要望がある。
【解決手段】撮像装置群が撮影する2枚1組のステレオ画像に写っている被写体における視差を利用して、画像を構成する画素毎に、被写体までの距離を算出する。そして、画像に写っている被写体のうち、背景よりも手前に写っている被写体の部分の画素群を抽出する。さらに、これら抽出した被写体の部分の画素群に対して、統計的学習に基づくパターン認識処理を行い、これら抽出した被写体の部分の画素群の中に、予め定められた所定の対象物が被写体として含まれていることを検出する。
(もっと読む)
陽極酸化アルミナの検査装置および検査方法、ならびに陽極酸化アルミナを表面に有する部材の製造方法
【課題】陽極酸化アルミナの状態(微細凹凸構造の形状、欠陥等)を簡易に検査できる検査装置および検査方法、ならびに陽極酸化アルミナの微細凹凸構造の形状等のムラや表面の欠陥が抑えられた、陽極酸化アルミナを表面に有する部材の製造方法を提供する。
【解決手段】モールド100に光を照射するライン状照明装置10(第一の照射手段)と;モールド100の陽極酸化アルミナで反射した光を撮像するカラーラインCCDカメラ12(第一の撮像手段)と;モールド100に光を照射するライン状照明装置20(第二の照射手段)と;モールド100の陽極酸化アルミナで反射した光を撮像するモノクロラインCCDカメラ22(第二の撮像手段)と;2つのカメラによって撮像された画像から得られた色情報および輝度情報に基づいて陽極酸化アルミナの状態の良否を判定する画像処理装置30(画像処理手段)とを有する検査装置を用いる。
(もっと読む)
形状測定装置
【課題】安価でかつ幅方向に高い分解能を有することができ、高精度に被測定物体の形状を測定可能にする。
【解決手段】被測定物体1の搬送方向に対し垂直な平面内であってその斜め上方または下方に配置されスリット状光を照射するスリット状光光源2a,2bと、被測定物体1を介しスリット状光光源2a,2bと反対側となる被測定物体1の斜め上方または下方であって、被測定物体1の表面1aまたは裏面1b上に照射されたスリット状光をその照射方向に対し所定の角度だけずれた方向から撮像する撮像部3a,3bと、撮像部3a,3bが撮像した被測定物体表面1aおよび裏面1bの撮像画像の座標を、撮像部3a,3bがスリット状光光源2a,2bからの照射線上で撮像したように変換する座標変換部4a,4bと、その座標変換された撮像画像の座標に基づいて、被測定物体1の断面厚み形状を演算する断面厚み形状演算部5とを有する。
(もっと読む)
高速光学センサ検査システム
【課題】電子部品を、高速に検査する光学システムを提供する。
【解決手段】センサは、カメラのアレイに対してノンストップで移動する加工対象物に関する画像データを取得するように構成されたカメラのアレイを含む。カメラのアレイが画像データを取得するとき照明のパルスを提供するために照明システムが配置されている。少なくともいくらかの画像データは、加工対象物上のスキップマーク又はバーコードに関するデータを含む。又取得した複数の画像により立体画像化する。
(もっと読む)
光学測定装置、光学測定方法および同測定方法を用いた光学フィルムの製造方法
【課題】同じ測定箇所で位相差値と厚みデータとを測定することで、複屈折や厚み方向位相差値Rthをより精度よく得ることができる光学測定装置を提供する。
【解決手段】光学測定装置Mは、光学フィルムSに光L1を入射する投光器30と、投光器30から光学フィルムSに入射された入射光L1を受光する受光器34と、受光器34によって受光された透過光L1から光学フィルムSの面内位相差値R0を算出する位相差R0算出部11と、位相差R0算出部11で面内位相差値R0を算出するのに用いた入射光L1と同じ入射光L1を用いて光学フィルムSの厚みデータdを算出する厚み算出部12とを備えている。受光器34は、2つのファイバ部8a,8bに分岐される光ファイバ8を含んでおり、一方のファイバ部8aが位相差R0算出部11に接続され、他方のファイバ部8bが厚み算出部12に接続されている。
(もっと読む)
波長走査干渉計
【課題】移動する被検体までの絶対距離を高精度に計測する。
【解決手段】第1光源からの第1光束によって形成される被検体の位置情報を含む第1干渉信号と、第2光源からの第2光束によって形成される前記被検体の位置情報を含む第2干渉信号と、前記第1光束の波長を走査しながらの前記第1干渉信号と前記第2光束の波長を走査しながらの前記第2干渉信号とに基づいて前記被検体までの絶対距離を算出する処理部とを備え、前記処理部は第1時刻から第2時刻までの時間間隔における前記第1干渉信号の位相と前記第2干渉信号の位相との差分の変化量によって得られる前記被検体の速度によって、前記第1干渉信号および前記第2干渉信号の少なくとも一方に基づいて算出される誤差を有する絶対距離を補正し、誤差が補正された絶対距離を算出する。前記第1時刻および前記第2時刻は前記第1光束の波長と前記第2光束の波長との差分が互いに等しい時刻である。
(もっと読む)
プロペラレーシング監視装置
【課題】船舶における操船性の向上が図れるプロペラレーシング監視装置を得る。
【解決手段】船体10に設置され、水面11にレーザ光1aを照射するレーザ発振器1と、船体10の側壁に設置されレーザ光が水面11から散乱する散乱光を検出する複数の光センサ2を備え、これらにより水面位置を検出する水面位置検出装置と、水面位置検出装置で検出した水面位置と、プロペラの位置との関係からプロペラレーシングの可能性を判断するプロペラレーシング判断装置とを具備し、プロペラレーシングの可能性ありと判断したとき、推進器4に対してプロペラ3の回転数を下げるように指令を与えるもの。
水面位置検出装置は、船舶周辺の水面状態が逐次どのように変化しているのかを定量的に測定する。そして、プロペラ3の空気中への露出する可能性が高いと判断した場合、予めプロペラ3の回転数を下げるよう推進器4を制御する指令を送出する。
(もっと読む)
物品認識装置、物品認識システム、プログラムおよび物品認識方法
【課題】 表面に光沢がある複数の物品をステレオカメラを用いて認識する。
【解決手段】 認識対象の複数の物品からなる物品群を撮像する第1および第2カメラを備えたステレオカメラを制御するカメラ制御部と、物品群を互いに異なる方向から照明する第1ないし第3照明装置を制御する照明制御部と、第1ないし第3照明装置のうちの何れか1つを順次点灯させて、ステレオカメラによってそれぞれ撮像された一対の2次元画像からなる第1ないし第3画像対を取得する撮像処理部と、第1ないし第3画像対に含まれる少なくとも1つの2次元画像から物品をそれぞれ含む領域を抽出する抽出処理部と、領域ごとに、第1ないし第3画像対のうち第1および第2カメラ間の受光量の差が所定値以下である画像対に基づいて物品の3次元画像を生成する3次元化処理部と、3次元画像に基づいて物品を認識して位置・姿勢情報を算出する認識処理部と、を有する。
(もっと読む)
レール凹凸測定装置
【課題】レールの凹凸をレール長手方向に連続測定するレール凹凸測定装置を提供する。
【解決手段】測定レール(R1)上を走行可能な測定車両(10)と、測定車両(10)の進行距離を測定する距離センサ(31)と、測定車両(10)に取り付けられると共に測定レールの長手方向に不均等な間隔で順に直列に配置された第1、第2および第3の変位センサ(21、22、23)からなる変位センサ群(20)を有し、第1、第2および第3の変位センサ(21、22、23)のうち少なくとも1つの変位センサは位置について変更可能である。
(もっと読む)
測距方法及びレーザ測距装置
【課題】レーザ光の特徴である可干渉性を利用しながら、光学系に機械的手段を用いずに被測定物の厚み方向の距離もしくは厚みを高精度に測距する測距方法及びレーザ測距装置を提供する。
【解決手段】反射部14を階段状とすることで、測定光と参照光との光路差が段差の間隔で連続的に変化する光強度データ列を得ることができる。そして、この光強度データ列をフーリエ変換することで各干渉光の明部の位置を取得し、第1レーザ光に基づく干渉光の明部の位置と第2レーザ光に基づく干渉光の明部の位置とが一致する第1位置と第2位置とに基づいて測距を行う。よって、光学系に機械的手段を用いずに被測定物6の厚み方向の距離Lもしくは厚みを高精度に測距することができる。
(もっと読む)
141 - 160 / 2,728
[ Back to top ]