
Fターム[2F065JJ05]の内容
光学的手段による測長装置 (194,290) | 受光部 (23,546) | 複数の受光部 (2,728)
Fターム[2F065JJ05]に分類される特許
161 - 180 / 2,728
テープギャップ測定のためのポータブルゲージ及びその方法
【課題】テープギャップの手動測定は労働集約的であるため、構造物の大きな領域にわたる複数のテープギャップの測定を正確かつ効率的に実行し、しかもオペレーターの技能に大きく依存しないテープギャップの測定方法及び装置を提供する。
【解決手段】表面を構成する複合テープの細片間のギャップはゲージによって測定される。表面に沿ってゲージを移動するにつれて隣接するテープ細片のエッジの位置は検出され、隣接する細片間のギャップは検出したエッジの位置に基づいて計算される。
(もっと読む)
測距方法及びレーザ測距装置

【課題】レーザ光の特徴である可干渉性を利用しながら、光学系に機械的手段を用いずに被測定物の厚み方向の距離もしくは厚みを高精度に測距する測距方法及びレーザ測距装置を提供する。
【解決手段】反射部14を階段状とすることで、測定光と参照光との光路差が段差の間隔で連続的に変化する光強度データ列を得ることができる。そして、この光強度データ列をフーリエ変換することで各干渉光の明部の位置を取得し、第1レーザ光に基づく干渉光の明部の位置と第2レーザ光に基づく干渉光の明部の位置とが一致する第1位置と第2位置とに基づいて測距を行う。よって、光学系に機械的手段を用いずに被測定物6の厚み方向の距離Lもしくは厚みを高精度に測距することができる。
(もっと読む)
3D表面形状をキャプチャーするための方法およびシステム
【課題】変形表面のキャプチャーを高解像度で得る。
【解決手段】シーンの3D画像データをキャプチャーするシステムにおいて、各々が互いに異なる波長の光を照射し、キャプチャーすべきシーンを照明するよう構成された三つの光源と、前記シーンから反射された前記光源からの光を受光するよう構成され、各光源から受光された光を分離し、前記三つの光源ごとにキャプチャーされた前記画像に関するデータを出力する第一ビデオカメラと、前記シーンの第一デプスマップをキャプチャーするよう構成されたデプスセンサと、前記第一ビデオカメラからデータを受信し、該データを処理して前記三つの光源ごとにキャプチャーされた前記画像から得られた法線領域に関するデータを取得する解析ユニットにおいて、前記法線領域に関する前記データを前記第一デプスマップのデータに合成して、前記シーンの3D画像データをキャプチャーする前記解析ユニットとを備える。
(もっと読む)
ステレオカメラ装置、ステレオカメラシステム、プログラム
【課題】2台のカメラで撮像した撮像画像の対応付けを容易にする。
【解決手段】2台のカメラ1、2は、光軸を平行にして配置される。カメラ1、2が撮像した撮像画像の画素の位置は、受光面に規定した2次元の直交座標である第1座標系で表される。また、実空間の点の位置は、カメラ1、2の光学中心を結ぶ第1方向と、カメラごとの光軸の方向である第2方向と、第1方向および第2方向に直交する第3方向との3軸の周りのそれぞれの角度によって表される。演算処理部10は、撮像画像を第1方向の軸周りの角度と第2方向の軸周りの角度とで位置が表される第1変換画像に変換する第1変換部101と、撮像画像を第1方向の軸周りの角度と第3方向の軸周りの角度とで位置が表される第2変換画像に変換する第2変換部102と、第1変換画像および第2変換画像を用いて視差を求める視差推定部103とを備える。
(もっと読む)
空中物位置測定装置、空中物位置測定システム及び空中物位置測定方法
【課題】空中に配置される雲などの測定対象物の位置を容易に正確に測定することができる空中物位置測定装置を提供する。
【解決手段】空中物位置測定装置300であって、第一地点OAにおいて全天カメラを用いて撮像された第一全天画像Z1と、第二地点OBにおいて全天カメラを用いて撮像された第二全天画像Z2とを取得する画像取得部310と、第一全天画像Z1に含まれる測定対象物の画像である第一対象物画像と、第二全天画像Z2に含まれる測定対象物の画像である第二対象物画像とが一致するように、第一全天画像Z1と第二全天画像Z2とを方位を維持しながら重ね合わせて重合画像Z3を生成する画像生成部320と、重合画像Z3内における、第一全天画像Z1の中心位置と第二全天画像Z2の中心位置と測定対象物の位置との位置関係から、空中に配置されている測定対象物の位置を算出する位置算出部330とを備える。
(もっと読む)
形状計測装置
【課題】太陽電池ウェハの表面及び裏面の形状のみならず、太陽電池ウェハの厚みを高速に算出する。
【解決手段】光源121,131は太陽電池ウェハの表面及び裏面に光切断線CLを照射する。カメラ122,132は太陽電池ウェハが所定距離搬送される都度、測定試料500の表面及び裏面の光切断線画像を連続撮像する。計測データ算出部123,133は角光切断線画像から光切断線CLが現れている重心座標を表面計測データ及び裏面計測データとして算出する。高さデータ算出部143は、表面計測データ及び裏面計測データから太陽電池ウェハの表面及び裏面の高さデータを算出する。厚みデータ算出部146は、太陽電池ウェハの表面及び裏面の高さデータから太陽電池ウェハの厚みデータを求める。
(もっと読む)
位置測定装置
【課題】位置測定装置における可動部材をできる限り他の部材と機械的に接続せずに成る高精度の位置測定装置を提供すること。
【解決手段】検出ユニット20と信号ユニット30を構造的に分離されたユニットとして形成し、検出ユニット20を測定標準10に対して少なくとも1つの測定方向xに沿って変位可能に配置し、光源から照射されるビームを信号ユニット30から検出ユニット20の方向へ照射し、少なくとも1対の部分ビームを検出ユニット20から信号ユニット30の方向へ照射し、検出ユニット20及び信号ユニット30を互いに平行な平面内に配置し、信号ユニット30と検出ユニット20の間におけるビームの少なくとも一部の拡がり方向を前記平面に対して垂直に配向するよう構成した。
(もっと読む)
位置検知システム、それを用いた移動体、位置検知方法およびそのためのプログラム
【課題】センサの計測範囲に特徴的な被写体が存在していない場合や、そのセンサが他のセンサの計測範囲外にあるときにも、その位置姿勢の算出を可能にする。
【解決手段】第1のセンサは、環境内の存在物の位置情報および色情報を第1の検知情報として得るものであり、第2のセンサは、存在物の色情報を第2の検知情報として得るものであり、情報処理装置は、第2のセンサの位置姿勢を仮に設定する位置姿勢仮設定部と、位置姿勢仮設定部により仮に設定された第2のセンサの位置姿勢から存在物を検知したときに得られる検知情報を、仮想検知情報として、第1の検知情報を用いて仮想的に作成する仮想検知情報作成部と、仮想検知情報作成部で作成された仮想検知情報と第2のセンサで得られた第2の検知情報を比較する比較部と、比較部の比較結果と仮に設定された第2のセンサの位置姿勢から、第2のセンサの位置姿勢推定値を出力する位置姿勢推定部を備える。
(もっと読む)
変位検出装置
【課題】高い回折効率を示し、精度良く位置検出を行える変位検出装置を提供することを目的とする。
【解決手段】台形または矩形のレリーフ形状をした回折格子を用いる。また、可干渉光を出射する光源部と、光源部から出射された光束を二つの光束に分割する光束分割部と、を含み、二つの光束をP偏光として回折格子上に照射させる照射光学系と、二つの光束が回折格子により回折されることによって生じる二つの第1回折光をそれぞれ反射し、回折格子上にP偏光として再入射させる反射光学系を備える。また、回折格子に再入射した二つの第1回折光が回折されて生じる二つの第2回折光を干渉させる干渉光学系と、干渉光学系により干渉した光を受光する受光部と、受光部において取得した干渉信号に基づいて、回折格子の位置情報を検出する位置検出部を備えるものとする。そして、回折格子のレリーフの周期を、回折格子に入射する可干渉光の波長の1.5倍以下とする。
(もっと読む)
丸棒外形寸法測定装置
【課題】測定の応答遅れを考慮する必要のない高速サンプリングが可能で、測定の瞬時値から算出することで測定精度を向上させることができる丸棒外形寸法測定装置を提供する。
【解決手段】丸棒Wの径よりも大きな径のレーザ光を照射するレーザ光源と、複数の受光素子を有して該レーザ光源からのレーザ光を受光する受光センサを有する受光部20とを備え、レーザ光源が、レーザ光源と受光部20との間の位置で軸方向がレーザ光の光軸と直交する方向に配置された丸棒Wに、レーザ光を照射し、受光センサの複数の受光素子が、丸棒Wの外形方向にライン状に配置され、丸棒Wの外形の外側を通過したレーザ光の強度を、受光センサの受光素子毎に連続的に測定し、丸棒Wの外形寸法を算出する。
(もっと読む)
アンテナ位置判定装置
【課題】 2種類のレーザセンサを組み合わせて使用し、複雑な計測を行うことなく、アンテナの放射部が基準位置に入っているか否かを判定させることで、簡易な構成によるアンテナ位置判定装置を提供することを目的とする。
【解決手段】 固定治具にアンテナが固定された後、第1透過型レーザセンサ部及び第2透過型レーザセンサ部並びに複数の反射型レーザセンサ部を制御してレーザ光を発光させ、第1透過型レーザセンサ部及び第2透過型レーザセンサ部が遮光を検知し、複数の反射型レーザセンサ部が導出した距離が適正距離であるときに、放射部が基準位置に配置されていると判定し、第1透過型レーザセンサ部又は第2透過型レーザセンサ部の少なくとも一方が透過を検知したとき、又は、複数の反射型レーザセンサ部が導出した距離が適正距離でないときに、放射部が基準位置に配置されていないと判定するアンテナ位置判定装置。
(もっと読む)
トレッドトランスファー、及びそれを用いたトレッドトランスファーとシェーピングフォーマとの芯ズレ評価方法
【課題】トレッドトランスファーとシェーピングフォーマとの芯ズレを、迅速に評価でき、生産ラインの精度低下を早期にフィードバックしうるとともに、装置コストの上昇を最小限に抑えうるトレッドトランスファー、及びそれを用いたトレッドトランスファーとシェーピングフォーマとの芯ズレ評価方法を提供する。
【解決手段】トレッドリングを、シェーピングフォーマに保持された生タイヤ基体の半径方向外側のトレッド貼付位置まで搬送しかつ保持するトレッドトランスファーである。トレッドトランスファーのリング状移動台に、トレッド保持リング11の軸心11jとは直角な基準面S0上にて前記軸心11jを通るX軸上に配される第1のレーザ距離センサ21と、このX軸とは直交する向きのY軸上に配される第2のレーザ距離センサ22とを設ける。前記第1、2のレーザ距離センサ21、22にてシェーピングフォーマの支持軸5までの距離を測定する。
(もっと読む)
計測面傾き計測装置、プロジェクタ及び計測面傾き計測方法
【課題】投影面傾き計測装置、プロジェクタを小型化する。
【解決手段】投影面傾き計測装置11は、投光ユニットと、入射角センサと、を備える。入射角センサは、水平方向、垂直方向にそれぞれ、2つずつ配置される。投光ユニットは、スクリーンS上の水平方向、垂直方向に、それぞれ、設定された2つの測距点に光を投光して投光スポットを形成する。入射角センサは、投光スポットからの反射光を受光して、その入射角を検出する。この入射角センサは、2分割受光素子からなり、2つの受光素子に入射した光の受光割合に基づいて、反射光の入射角を検出する。このような構成により、位相センサで必須のレンズが不要となり、レンズの焦点距離を確保する必要もないので、小型化も可能となる。
(もっと読む)
形状認識方法、形状認識装置及び実装基板生産装置
【課題】物体が高速で移動し、物体の大きさによって必要とされる分解能が異なる場合でも、当該物体の形状認識を精度良く行うことができる形状認識方法を提供する。
【解決手段】物体の形状認識方法であって、基準光を物体上の投影領域に投影する基準光投影ステップ(S102)と、基準光が投影された投影領域のうちライン状の領域を撮像する基準光撮像ステップ(S104)と、輝度の傾斜方向に輝度が異なる輝度傾斜量を有する光である輝度傾斜光を投影領域に投影する傾斜光投影ステップ(S106)と、輝度傾斜光の投影方向と異なる撮像方向で、輝度傾斜光が投影された投影領域のうち、輝度傾斜光の輝度の傾斜方向と異なる方向に延びて配置されるライン状の領域を撮像する傾斜光撮像ステップ(S108)と、基準光撮像ステップ(S104)と傾斜光撮像ステップ(S108)での撮像結果を用いて物体の形状を認識する形状認識ステップ(S110)とを含む。
(もっと読む)
基板検査装置、基板検査方法及び該基板検査装置の調整方法
【課題】貼り合わせた2つの基板層のいずれかに検査光の透過しない部分があっても、貼り合わせ界面に発生し得る微小空洞を検査することのできる基板検査装置を提供することである。
【解決手段】基板100の表面に対して斜めに入射するように検査光を帯状に照射する光源ユニット30と、前記検査光により前記基板の表面に形成される帯状照明領域を挟んで光源ユニット30と逆側の所定位置に配置されるラインセンサカメラ20とを有し、照明ユニット30及びラインセンサカメラ20と基板100とが相対移動している際にラインセンサカメラ20から出力される映像信号に基づいて基板画像情報を生成し、基板画像情報に基づいて基板100の第1基板層101と第2基板層102との界面に生じ得る微小空洞についての検査結果情報を生成する構成となる。
(もっと読む)
矯正プレス
【課題】能率よく、かつ正確に適切な矯正を行うことができる矯正プレスを提供する。
【解決手段】被矯正プレートPを載せるベッド5と、ベッド5の上方から被矯正プレートPを押圧する上型7とを有する矯正プレスであって、被矯正プレートPの平坦度を測定する平坦度計を備えており、平坦度計が、レーザー光投射器10とカメラ20からなり、レーザー光投射器10は、プレスの一側においてレーザー光を被矯正プレートPの上面に照射できる位置に配置されており、カメラ20は、プレスの他側においてレーザー光の照射方向に対し被矯正プレートPの送り方向においてオフセットした位置に配置されている。レーザー光投射器10とカメラ20が1対もしくは2対用いられる矯正プレスは、ベッドとクラウン部をコラムを介して連結した構造であって、前後コラム間のサイドオープニング開口SOは被矯正プレートの幅(W)に対する比がSO/W≧0.3が好ましい。
(もっと読む)
画像形成装置および画像形成方法ならびに部品実装装置
【課題】安定した3次元認識画像を形成して正しい部品認識結果を得ることができる画像形成装置および画像形成方法ならびに部品実装装置を提供する。
【解決手段】計測対象面への入射方向を挟んで対称に配置され受光面の計測対象面に対する傾斜角度が各対毎に相異なる2対の位置検出素子群25A,25Bを有し、走査光の計測対象面からの反射光の受光位置を検出する位置検出部25と、各位置検出素子が受光する光量が所定の範囲内にあるか否かを判定する受光量判定部34と、同一の位置検出素子群に属する位置検出素子による反射光の受光位置検出結果の差異の大きさが所定の基準値以下であるか否かを判定する受光位置検出結果判定部35とを備え、位置検出部25の受光位置検出結果に基づき受光量判定部34および受光位置検出結果判定部35の判定結果を加味して計測対象面の3次元認識画像を形成する構成とする。
(もっと読む)
マーク検出方法及び装置、位置制御方法及び装置、露光方法及び装置、並びにデバイス製造方法
【課題】物体上の複数のマークを効率的に、かつ高精度に検出する。
【解決手段】少なくとも1軸方向に関する検出領域が互いに異なる複数のアライメント系で、少なくともその1軸方向に関して互いに異なる位置に配置されたウエハ上のマークを検出するマーク検出方法であって、複数のアライメント系の検出領域にそれぞれウエハ上のマークを移動するステップ315と、ウエハをZ方向にスキャンして複数のアライメント系の検出信号及びデフォーカス量に対応するフォーカス信号を取り込むステップ316と、複数のアライメント系の検出信号とフォーカス信号とからフォーカス信号のオフセットを求めるステップ317とを有する。
(もっと読む)
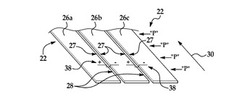
印刷位置検出方法
【課題】可撓性シートに対する印刷型の配置が種々である印版を使用して印刷を行う際に、初期段階であっても段ボールシートに印刷される位置を正確に検出することができる、印刷位置検出方法を提供する。
【解決手段】可撓性シート21上の印刷型22の基準点Q3から予め定める所定距離の第一基準点Q1に、印刷型22より高さの低い被検出体30を取り付け、版胴11の回転に伴う被検出体30の通過を第一センサ31によって検出し、挟持点Q0に向かい搬送される段ボールシート1上に第二基準点Q2を設定し、第二基準点Q2の通過を第二センサ32によって検出し、第一センサ31による第一基準点Q1の検出点と挟持点Q0との距離N1、第二センサ32による第二基準点Q2の検出点と挟持点Q0との距離N2、及び、印刷型の基準点Q3と第一基準点Q1との距離に基づき、段ボールシート1において印刷型の基準点に対応する点Q3’を検出する。
(もっと読む)
アクチュエータの行程位置検知装置
【課題】パターンが経年劣化等の変化することにより、位置検知用のセンサからの出力信号が変化したとしても、行程位置を把握することができるアクチュエータの行程位置検知装置を提供する。
【解決手段】油圧シリンダ1(アクチュエータ)のロッド4に、ストローク方向の範囲内において変化がない基準部とストローク位置を特定できるように変化させる符号化部とを有するパターンXを描画して、基準部を検知する基準センサ(基準検知部)が出力する基準信号に基づき位置検知センサ(位置検知部)が出力する位置信号を判断して、ストローク位置を把握する制御装置とを備える。
(もっと読む)
161 - 180 / 2,728
[ Back to top ]