
Fターム[2F065JJ05]の内容
光学的手段による測長装置 (194,290) | 受光部 (23,546) | 複数の受光部 (2,728)
Fターム[2F065JJ05]に分類される特許
81 - 100 / 2,728
寸法測定装置、シール面間寸法測定装置およびシール面間寸法測定方法
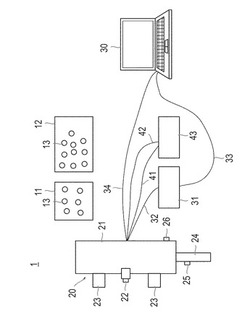
【課題】自動車のドア側のシール面とボディー側のシール面との間のシール面間寸法を正確かつ短時間で測定する。
【解決手段】少なくとも片面に配置された複数のターゲットマーク13を表にして車両のボディー側に取り付けるボディー側ターゲットボード11と、両面に配置された複数のターゲットマークが表裏から見えるように車両のドア側に取り付けるドア側ターゲットボード12と、車両のボディー側のシール面およびドア側のシール面にレーザ光を照射するレーザ光照射部22と、ターゲットボード11、12を撮影するステレオカメラ23と、撮影したレーザ光からボディー側およびドア側のシール面の断面形状を認識し、撮影したターゲットマーク13を用いてボディー側およびドア側のシール面の断面形状を一致させるように移動させ、ボディー側のシール面とドア側のシール面との間のシール面間寸法を測定する画像処理部30と、を有する。
(もっと読む)
光学式位置検出装置、位置検出システムおよび入力機能付き表示システム

【課題】検出光の進行方向および検出光の進行方向に交差する方向の双方における検出範囲を拡張することのできる光学式位置検出装置、位置検出システム、および入力機能付き表示システムを提供すること。
【解決手段】位置検出システム1において、光源部12は、検出光L2を放射状に出射するとともに、検出光L2の放射角度範囲において一方側から他方側に向かって強度が変化する光強度分布を形成し、受光部13は、光強度分布が形成された検出対象空間10Rに位置する対象物体Obで反射した検出光L2を受光する。光源はレーザー光源14であり、レーザー光源14から出射されたレーザー光(検出光L2)を可動ミラー11によって走査する。
(もっと読む)
干渉計方式により間隔測定するための機構
【課題】十分に平行に配設された二つのプレート間で、高精度で干渉計方式により間隔測定するための機構を提供する。
【解決手段】光源3.1から発せられた光束が、第一プレート1にある分光器要素1.2に傾斜して当たり、そこで反射される参照光束と透過する測定光束に分割される。測定光束は第二プレート2にあるリフレクタ要素2.2に当たり、そこで第一逆反射を受ける。参照光束は第一屈折要素3.2aを、測定光束は第二屈折要素3.2bを通過し、二つの光束は引き続いて、それぞれ関連配置された逆反射器3.3を通過して、測定光束は第三屈折要素3.2cを、参照光束は第四屈折要素3.2dを通過する。そして参照光束は第一プレート1で反射を、測定光束は第二プレート2のリフレクタ要素2.2で第二逆反射を受け、それにより二つの光束が、共直線で検知ユニット3の方向に伝播し、そこで位相がずれた複数の走査検知信号を生成することができる。
(もっと読む)
対象物体の検出方法、検出装置及びプログラム
【課題】対象物体を3次元の点群として計測した場合の形状データに基づいて、高速化を図りつつ精度よく対象物体を検出することの可能な検出方法を提供する。
【解決手段】3次元計測手段から3次元の計測点群として球体の形状データを取得する形状データ取得ステップ(S1)と、仮想座標空間において球体が占める対象体領域を各計測点の付加情報に従って区画する領域分割ステップ(S41)と、分割された各対象体領域の中から球体と推定される推定領域を抽出する対象体領域抽出ステップ(S43)と、推定領域毎に推定球体を生成し、対象体と認識される推定対象体を認識対象体とする対象体認識ステップ(S44)とを備える。
(もっと読む)
車両用ミラー制御装置
【課題】車両用ミラーの鏡面角度をドライバにとって好適な角度に自動的に調整しながらも、乗員にとっての快適性を損ない難くすることを可能にする。
【解決手段】車両が走行中と判定した場合であって、且つ、いずれかの車両用ミラーをドライバが見ていると判断した場合には、ドライバが見ている車両用ミラーであると判断した車両用ミラーの最適角度を算出し、その算出結果に基づいて当該車両用ミラーについてのみ鏡面角度の調整を行う一方、車両が走行中でないと判定した場合、若しくは車両が走行中と判定した場合であって、且つ、いずれの車両用ミラーもドライバが見ていると判断しなかった場合には、車両用ミラーの鏡面角度の調整を行わない。
(もっと読む)
立体感提示装置および方法ならびにぼけ画像生成処理装置,方法およびプログラム
【課題】片眼でも立体感を得ることができる立体感提示装置を提供する。
【解決手段】間隔をおいて配置された2台のカメラから出力されるステレオ画像データを構成する左右の画像データに基づいて距離画像データを生成する距離画像生成手段53と,生成された距離画像データを用いて,上記の左または右の画像データに,距離に応じた焦点ぼけを与えてぼけ画像データを生成するぼけ画像生成手段55を備える。生成されたぼけ画像データに基づいて対象の焦点ぼけ画像を表示装置に表示する。
(もっと読む)
振動計測装置および振動計測方法
【課題】振動の測定および解析を容易に行うことができるようにする。
【解決手段】高速度カメラ4の撮像部4aは、ケーブル10の各実測点に設けられたマーカーシール5が正反射する光を撮像する。高速度カメラ4の計算処理部4bは、撮像部4aによる撮像と並行して、撮像部4aが撮像した画像毎に各実測点の座標を求める。高速度カメラ4のメモリ4cは、各実測点の座標に係るデータを記憶する。コンピュータ6は、メモリ4cに記憶された各実測点の座標に係るデータを用いてケーブル10の振動分析を行う。
(もっと読む)
光検出装置
【課題】入射光の入射位置及び入射方向を同時に検出することができるようにした光検出装置を提供する。
【解決手段】第一の平面内にマトリックス状に配置した複数個の光検出素子から成る第一の光センサアレイ11と、第一の平面の光入射側と反対側にて所定間隔dで平行に隔置した第二の平面内にマトリックス状に配置した複数個の光検出素子から成る第二のセンサアレイ12と、スポット状の入射光による第一及び第二の光センサアレイ11、12からの検出信号に基づいて、当該入射光の第一及び第二の光センサアレイ11、12上における入射位置P1,P2を演算すると共に、演算した入射位置間の偏位量ΔPから当該入射光の入射角度θを演算して、当該入射光の入射位置及び入射方向を決定する信号処理部14と、を含むように、光検出装置10を構成する。
(もっと読む)
動きを検出するシステム、リソグラフィ装置、およびデバイス製造方法
【課題】誤差の影響を受けにくいが大きな空間を占有しない、改善された精密測定システムを提供する。
【解決手段】本体の動きを検出するシステムであって、本体と、基準フレームに対して実質的に静止して取り付けられた第1回折格子40,42と、本体に取り付けられた第2回折格子50,52と、第1および第2回折格子で回折された一つ以上の放射ビームを受け取り、基準フレームに対する本体の動きを検出するように構成された検出器60,61,62,63と、を備え、検出器60,61,62,63が本体に結合され、本体に対して移動可能である。
(もっと読む)
指示位置表示装置および指示位置表示システム
【課題】レーザー光の照射位置の制御や照射位置の制御にかかる装置レイアウトの自由度を向上する。
【解決手段】カメラ10と、レーザーポインタ20が照射するレーザー光の照射位置を含む範囲をカメラ40が撮像するようにレーザーポインタ20とカメラ40とを載置され、レーザーポインタ20とカメラ40とを一緒に回動させるポインタマニピュレータ30と、ポインタマニピュレータの回動を制御する制御装置50と、を備え、制御装置50は、カメラ40が撮像する画像P2とカメラ10が撮像する画像P1とを取得し、画像P2内における画像P1の位置を特徴点マッチングにより特定し、画像P1と画像P2と前記位置とに基づいて、ポインタマニピュレータ30の回動を制御する。
(もっと読む)
トロリ線データ比較装置
【課題】過去のトロリ線データと現在のトロリ線データとで走行位置を正確に一致させることを可能としたトロリ線データ比較装置を提供する。
【解決手段】車両の屋根上に配置されて鉛直上方のトロリ線を撮影するラインセンサカメラ2と、ラインセンサカメラ2から入力される映像信号を収録する画像録画部と、画像録画部から現在のトロリ線画像を入力するラインセンサ画像入力部5a、現在のトロリ線画像からトロリ線の摩耗及び偏位を抽出する摩耗・偏位抽出部5b、過去のトロリ線画像と現在のトロリ線画像とから車両の偏位の位置ずれ量を検出する偏位位置ずれ検出部5c、及び位置ずれ量を現在のトロリ線画像に反映し、過去のトロリ線画像と比較する摩耗量比較部5dを備える画像処理部とから構成した。
(もっと読む)
位置制御システム、露光装置、及び露光方法
【課題】1つの実施形態は、例えば、基板の表面の位置の計測精度を向上できる位置制御システム、露光装置、及び露光方法を提供することを目的とする。
【解決手段】1つの実施形態によれば、面位置計測部と制御部とを有する位置制御システムが提供される。面位置計測部は、基板の表面の高さ方向の位置を計測する。制御部は、面位置計測部による計測結果に基づいて、光学系と基板の表面との相対的な位置を制御する。面位置計測部は、複数のフォーカスセンサ41−1〜41−3と駆動部42とを有する。駆動部は、基板の表面に対する複数のフォーカスセンサの基板面内方向の位置を独立して駆動する。
(もっと読む)
撮像装置
【課題】 被写体をステレオ撮影時にズーム調整が可能であり、撮影したステレオ画像から被写体の3次元位置情報を高精度で取得できる撮像装置を実現する。
【解決手段】 被写体を第1の方向から撮像する第1の撮像手段と、被写体を第1の方向とは異なる第2の方向から撮像する第2の撮像手段とを備え、第1の撮像手段により撮像された第1の画像と、第2の撮像手段により撮像された第2の画像を用いて、被写体の3次元位置情報を取得する撮像装置であって、撮像装置は、第1の画像および第2の画像をズーム調整して結像させるズーム光学系を有し、ズーム光学系は、焦点距離を検出する焦点距離検出手段を有することを特徴とする。
(もっと読む)
圧着端子検査装置および圧着端子検査方法
【課題】検査作業者の技量にかかわらず、圧着端子を精度よく検査できる、圧着端子検査装置および圧着端子検査方法を提供する。
【解決手段】圧着端子3の検査時には、検査作業者により、圧着端子検査装置1の端子配置部に圧着端子3が配置されて、圧着端子3が延伸方向に延びる軸線を中心に揺動される。この揺動中に、ハイト測定用エリアイメージセンサ14の撮像面141への圧着端子3の投影における第1測定位置Piおよび第2測定位置PwでのY軸方向寸法Yi,Ywが測定される。そして、Y軸方向寸法Ywの極小値Ywminが圧着端子3のワイヤバレル部32のクリンプハイトHwとして取得される。
(もっと読む)
画像処理方法、ステレオカメラシステム
【課題】より短い処理時間で距離情報が得られる画像処理方法を提供すること。
【解決手段】第1の画像と第2の画像を撮影するステップと、加算手段241が、第1の画像の第1の合計値、及び、第2の画像の第2の合計値を算出する合計値算出ステップと、シフト手段242が記第1の合計値を所定ビット数、右にシフトして第1の近似平均値を算出し、同様に第2の近似平均値を算出する近似平均値算出ステップと、整数倍手段243,244が、第1の画像と第2の画像の小領域内の各画素データの値を整数倍する整数倍ステップと、相関値算出手段249が、該画素データの値を整数倍した値から第1の近似平均値を引いた第1のデータと、画素データを整数倍した値から第2の近似平均値を引いた第2のデータをそれぞれ求め、画素データ毎に前記第1のデータと第2のデータとの差分の二乗和を算出する相関値算出ステップと、を有する画像処理方法を提供する。
(もっと読む)
ガラス基板の表面不良検査装置および検査方法
【課題】ガラス基板の表面不良の判定時間を減らし、NGの可能性の高い表面不良のみを検査員に提供して検査の集中度を極大化させる。
【解決手段】表面不良検査装置は、ガラス基板1の上方にそれぞれ配置され、ガラス基板表面不良に対する第1イメージおよび第2イメージをそれぞれ撮影する撮像装置10および20と、ガラス基板1の下方に配置され、撮像装置10、20側にガラス基板1を透過する暗視野照明装置30と、第1イメージ上の不良の位置座標と、第2イメージ上の不良の位置座標とを演算する検出信号処理部40とを備えている。ガラス基板上面に対する撮像装置10、20の撮影領域P1は互いに重ね合わされ、ガラス基板下面に対する撮像装置10、20の撮影領域P2、P3は、互いに異なるように構成されている。
(もっと読む)
画像ベースの位置決定
【課題】プラットフォームの位置を識別するための方法および装置を提供する。
【解決手段】プラットフォームが動いている間、プラットフォームに関連するカメラシステムによって生成された一連の画像内の特徴が識別される。カメラシステムのパースペクティブの移動が、一連の画像内の特徴の位置の移動から識別される。プラットフォームの位置の変化が、パースペクティブの移動に基づいて識別される。
(もっと読む)
車両の操舵角計測装置
【課題】操舵角計測装置を改善することにより、ステアリングホイールの操舵角を作業効率を向上しつつ精度よく計測し得る操舵角計測装置に関する。
【解決手段】ステアリングホイール3とともに回転する反射面5を有する反射部材4と、前記反射面5との距離に基づいた信号を出力する第1の変位計7a及び第2の変位計7bからなるレーザ変位計7とを含む車両のステアリングホイール3の操舵角計測装置1である。前記反射面5は、前記第1の変位計7aとの距離を一定とする等距離面と、第1継ぎ面とが交互にかつ階段状に接続される階段状面Kからなる第1の反射面と、前記第2の変位計7bとの距離が漸減する傾斜面と、第2継ぎ面とが交互に接続される鋸歯状面からなる第2の反射面とからなる。しかも、前記傾斜面と、前記等距離面とは、位相が揃えられている。
(もっと読む)
キャリブレーション装置及び歪み誤差算出方法
【課題】撮影画像内の周辺部において生じる歪み誤差を補正できる、キャリブレーション装置及びキャリブレーション方法を提供すること。
【解決手段】キャリブレーション装置100において、特徴点設定部110が、周期性を持って全体に配列された特徴点群が含まれたキャリブレーションボードがステレオカメラによって撮影されたボード画像内の画像内特徴点群の内から、設定ポイントが密に且つボード画像の中央部領域にのみ配置された第1パターン及び設定ポイントが疎に且つボード画像の全体に配置された第2パターンに基づいて、第1の画像内特徴点群セット及び第2の画像内特徴点群セットを設定する。誤差補正情報生成部130が、第1の画像内特徴点群セットに含まれた各画像内特徴点の座標と、第2の画像内特徴点群セットに含まれた各画像内特徴点の座標と、キャリブレーションパラメータとに基づいて、歪み誤差を算出する。
(もっと読む)
車両検出装置
【課題】複数の映像間で対応をとる特徴点を定めて位置合わせ基準を鮮明にでき、車両の検出精度を向上させる。
【解決手段】実施形態の車両検出装置は、線分成分抽出手段、多角形近似手段及び計測手段を備えている。前記線分成分抽出手段は、左右の撮影画像毎に、当該撮影画像に含まれる前記車両のフロントガラス領域と車体との境界を示す複数の線分成分を抽出する。前記多角形近似手段は、前記左右の撮影画像毎に、当該抽出された複数の線分成分の幾つかを用いて閉ループを構成する多角形近似を行う。前記計測手段は、前記左右の撮影画像毎に前記閉ループを構成する線分成分を当該左右の撮影画像間で互いに位置合わせし、当該位置合わせした線分成分間の座標情報と、左右の撮影画像を撮影した撮影位置を示す撮影位置情報とに基づいて、前記閉ループの位置を前記車両の位置として計測する。
(もっと読む)
81 - 100 / 2,728
[ Back to top ]