
Fターム[2F065JJ05]の内容
光学的手段による測長装置 (194,290) | 受光部 (23,546) | 複数の受光部 (2,728)
Fターム[2F065JJ05]に分類される特許
21 - 40 / 2,728
鋼管の外面曲がり測定方法
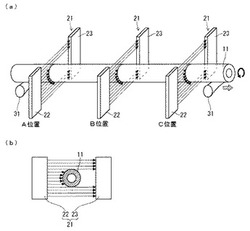
【課題】搬送される鋼管が跳ねた場合や楕円または外径の変動が鋼管に生じている場合も正確に測定できるとともに、工数を増大させることなく測定間隔を短くして定量的に測定できる外面曲がりの測定方法を提供する。
【解決手段】複数のローラ31によって鋼管11をその周方向に回転させつつ長手方向に搬送し、ローラ31のうちで隣り合うローラ31の間に鋼管外面の上端および下端の位置を検出する検出器21を等間隔に3台配置し、検出器21で検出した上端および下端の位置から鋼管外面の中心位置を3台の検出器についてそれぞれ求め、下記(1)式により振れwを算出すること特徴とする鋼管の外面曲がり測定方法である。ここで、3台の検出器21のうちで上流側(A位置)での中心位置をCA、中央(B位置)での中心位置をCB、下流側(C位置)での中心位置をCCとする。
w=CB−(CA+CC)/2 ・・・(1)
(もっと読む)
検出装置、画像形成装置及びプログラム

【課題】保持部材の第1の方向のたわみを検出する。
【解決手段】第1のイメージセンサは、中間転写ベルトの裏面に形成されたラダーパターンチャートの濃度を測定する。記憶部は、第1のイメージセンサと中間転写ベルトの裏面との間の距離と、この第1のイメージセンサの測定に係るラダーパターンチャートのコントラストとの対応関係を示す第1の関数を記憶する。制御部は、第1のイメージセンサにより測定されたラダーパターンチャートの濃度を用いて、ラダーパターンチャートにおいて隣り合う白領域と黒領域とのコントラストを算出する。制御部は、記憶部に記憶された第1の関数を用いて、算出されたコントラストに対応する距離を特定し、特定した距離を上述した白領域及び黒領域と中間転写ベルトの裏面との間の距離として用いて、中間転写ベルトの幅方向のたわみを検出する。
(もっと読む)
光学式センサ
【課題】複数の検出用導光部材に光を好適に分配し得る光学式センサを提供する。
【解決手段】光学式センサは、光源10と、光源10に光学的に結合された光ファイバー20と、光ファイバー束40と、光ファイバー20から光ファイバー束40に光を分配する光分配部30と、光ファイバー束40によって導光された光を分離して検出する光分離検出器50を有している。光ファイバー束40は、複数の光ファイバー41A,41B,41C,41D,41E,41Fを有している。光ファイバー41A〜41Fは、それぞれ、物理化学状態に応じて光学特性が変化する特性検出部42A,42B,42C,42D,42E,42Fを有している。
(もっと読む)
螺子類の寸法測定装置
【課題】 本発明の解決課題は、ワーク寸法を連続的に測定できる螺子類の寸法測定装置を提供することにある。
【解決手段】 本発明の螺子類の寸法測定装置は、移動通路と分離手段と搬送体と光学式測定手段を備えたものである。本発明では、螺子類を良品と不良品に仕分ける仕分け手段や、移動通路への螺子類の供給を停止する供給制御機構を設けることもできる。分離手段を螺子類の移動速度よりも速く回転する回転式のローラ或いはベルトとし、回転中に螺子類に接触して先頭の螺子類を後続の螺子類から離せるようにしてもよい。搬送体は螺子類の頭部上面に接触して移動通路側に押すことのできる回転ベルトとしてもよい。回転ベルトは数本の螺子類の頭部上面に接触する長さとしてもよい。発光素子と受光素子を螺子類の軸部の軸方向に離して二対配置し、二対の配置間隔を螺子類の公差と同一又は略同一寸法としてもよい。
(もっと読む)
物品の3次元位置姿勢の認識装置及び認識方法
【課題】製造現場で使われる汎用的な組み込み装置でも実施できるような、少ない計算コストで物品の3次元位置姿勢を認識できる認識装置及び認識方法の提供。
【解決手段】カメラ20で複数の物品22がバラ積みされた領域全体の2次元画像を取得し、レンジセンサ18でカメラ20と略同じ領域の3次元情報を取得する。取得した3次元情報から、取り出すべき物品が存在するであろう空間を対象空間として大まかに限定し、該対象空間に基づいて2次元画像処理で物品を探索するための探索条件を設定し、該探索条件に基づいて物品の画像上での2次元位置情報を取得する。次に該2次元位置情報を用いて、物品の3次元位置姿勢の認識に使用する3次元点データを選定し、カメラ20の焦点から該物品に向かう3次元空間上の視線を計算し、該3次元点データと視線とに基づいて物品の3次元の位置姿勢を計算する。
(もっと読む)
エンコーダ装置、光学装置、及び露光装置
【課題】回折格子を用いて計測を行う際に、相対位置を予め定められた相対位置からの絶対位置として容易に計測する。
【解決手段】エンコーダ10Xは、第1部材6に設けられ、格子パターン12Xa及び基準パターン13XAが形成された回折格子12Xと、計測光MX1,MX2を供給するレーザ光源16と、第2部材7に設けられ、計測光MX1,MX2を格子パターン面12Xbにθy方向(X方向)に対称な角度で傾斜させて入射させる傾斜ミラー32X,34Xと、計測光MX1,MX2の回折格子12Xによる回折光DX2,EX2を受光する光電センサ40XA,40XBと、を有する。
(もっと読む)
固定部材検出ユニット、固定部材解体システム、固定部材解体方法、およびプログラム
【課題】解体対象を固定している固定部材の位置の検出精度を高めること。
【解決手段】解体対象を撮像した撮像画像から、前記解体対象を固定している固定部材の画像として予め決められている固定部材画像を検出する固定部材画像検出部と、前記固定部材画像検出部により検出された前記固定部材画像の位置を示す位置情報を算出する位置情報取得部と、前記解体対象を固定している複数の前記固定部材の予め決められた位置関係を示す配置パターンと前記位置情報とに基づき、前記固定部材画像検出部によって検出された前記固定部材画像が前記配置パターンに含まれる前記複数の固定部材に対応するか否かを判定する配置パターン対応確認部と、を備える。
(もっと読む)
物体の光干渉測定装置および光干渉測定方法
【課題】さらに付加的な情報の取得が可能で、かつ堅牢な装置構造と高度な測定精度とを有する光干渉測定技術の提供。
【解決手段】光干渉測定装置は、光源1からの出発ビーム2を測定ビーム3と第1の参照ビーム4aとに分割するビームスプリッタ5aと、光の重ね合わせ手段と、第1の検出器8aとを備える。重ね合わせ手段と第1の検出器8aとは互いに連携する。物体7によって反射された測定ビームと第1の参照ビームとが第1の検出器の検出面で重ね合わされる。ビームスプリッタ5aは、出発ビーム2を測定ビーム3と、第1の参照ビーム4aと、少なくとも第2の参照ビーム4bとに分割する。重ね合わせ手段と互いに連係する第2の検出器8bが備えられ、物体7によって散乱させられた第1の受信ビーム4b’としての測定ビームと第2の参照ビーム4bとが第2の検出器8bの検出面で重ね合わされる。
(もっと読む)
厚み測定方法、厚み測定装置、および厚み測定システム
【課題】立体構造を有する物体の厚み分布を、短時間に、かつ容易に測定する。
【解決手段】厚み測定方法は、測定対象物6に光を照射する光照射工程(S1)と、測定対象物6に照射された光が、測定対象物6を透過しているときに、測定対象物6への光の照射方向とは異なる所定の方向から、測定対象物6を撮像する撮像工程(S2)と、その撮像画像に基づいて、測定対象物6の厚み分布を測定する測定工程(S3)と、を含む。
(もっと読む)
画像測定装置
【課題】簡単な構造で容易に対象エリア、又は測定対象の画像が取得できると共に対象エリアの測定が行える画像測定装置を提供する。
【解決手段】投光光軸26と照明光29を射出する光源27とを有し、前記投光光軸を経て前記照明光を投射する投光光学系5と、受光光軸15と撮像素子13とを有し、測定対象からの再帰反射光29′を前記受光光軸を経て撮像素子で受光する受光光学系6と、前記撮像素子で撮像されたデータを処理する制御演算装置7とを具備し、前記投光光学系は前記投光光軸を測定対象に向け前記照明光を投射する投光ユニット25と、該投光ユニットを高低方向、水平方向に回転し、前記照明光の投射角を変更する投射角変更手段23,33と、前記受光光軸に対する前記投光光軸の方向角を検出する方向検出手段24とを有する。
(もっと読む)
ひび割れ検出方法及び検出装置
【課題】スペックルパターンの明暗模様の時間変化の測定に基づくひび割れの検出方法において、その検出感度を向上する。
【解決手段】検査対象物Mの表面で反射されて位相変調された信号光2と、この検査対象物Mの表面で位相変調されていない参照光3との干渉によってフォトリフラクティブ結晶4中に生じたダイナミックホログラムで参照光3を回折し、この回折した参照光3を複数の検出チャンネル5を備えたマルチチャンネル検出器6で受光する。複数の検出チャンネル5のうち受光強度が最も高い受光強度を検出した検出チャンネル5から、予め決めた順番に相当する受光強度を検出した検出チャンネル5をディスクリミネータ7で弁別し、この弁別された検出チャンネル5の受光強度をマルチプレクサ8で積分してノイズを除去する。このノイズ除去によって位相変調を明確にとらえることができ、深いひび割れを高感度に検出できる。
(もっと読む)
歪測定装置、線膨張係数測定方法、及び、サーモビュアの補正係数測定方法
【課題】測定対象物の寿命に影響する熱歪(拘束歪)を容易に測定する。
【解決手段】歪測定装置は、コンピュータ1と、測定対象物の第1ステレオ画像PS1を生成する第1ステレオカメラ2と、第1ステレオカメラ2と離間した位置に配設され、測定対象物5の第2ステレオ画像PS2を生成する第2ステレオカメラ3と、測定対象物の温度分布を検出するサーモビュア4と、を備える。また、コンピュータ1は、第1ステレオ画像PS1及び第2ステレオ画像PS2から測定対象物の三次元形状を求めて、実歪εc(i,j)を求める実歪算出部12と、サーモビュア4によって検出された温度分布から熱自由歪εt(i,j)を求める熱自由歪算出部17と、実歪εc(i,j)から熱自由歪εt(i,j)を減じた差を、拘束歪εr(i,j)として求める拘束歪算出部18と、を備える。
(もっと読む)
シート体の縁部検出センサ
【課題】生地などのシート体の縁部を正確に検出することができる。
【解決手段】当接部材20と、当接部材20に面当接しているシート体Wへ向けて検出光を投光する投光部2と、投光部2が投光した検出光を受光する受光部3と、受光部3の受光量を基にシート体Wを検出する検出部35とを備え、投光部2は、シート体Wとその縁部Waから外れた外領域とにわたって検出光を投光できるように並設された複数の投光口2aを有し、受光部3は投光口2aに個別に対応する受光口3aを有し、検出部35は受光口3aに個別に対応する判断部を有している。
(もっと読む)
乾式ガスホルダーのピストンの監視方法および監視装置
【課題】乾式ガスホルダーに関し、ピストンの傾斜のみならず偏心も監視するための方法および装置を提供する。
【解決手段】筒状のホルダー本体2と、ホルダー本体内に配置された落し蓋状のピストン3と、ピストンとホルダー本体との隙間のシール機構4を具える乾式ガスホルダー1の、ピストンの監視方法において、ピストンの中心位置に偏心量測定テーブル5を設け、ホルダー本体の上端部に、偏心量測定テーブルおよびその近傍並びにその中心位置を含みまたは含まずに互いに多角形を形成する他の複数位置までの高さ方向距離を非接触でそれぞれ計測する距離計6を設け、中心位置の偏心量測定テーブルまでの高さ方向距離に急激な変化が生じた場合にピストンに偏心が生じたと判断し、その高さ方向距離の変化がないか穏やかな場合は、距離計で計測した多角形を形成する複数位置までの高さ方向距離に基づきピストンに傾斜が生じたか否かを判断する。
(もっと読む)
座標検出装置
【課題】 表示面における遮光物の座標位置を取得するまでの処理時間が短く、かつ表示面に接触した遮光物が検出光を遮光したことを適切に判断することができないことで発生する誤検出を防止することができる座標検出装置を提供する。
【解決手段】 座標検出装置10は、矩形状の表示面5を有する表示部5aと、複数の発光素子6aと、複数の受光素子6bと、座標位置検出部とを備える。表示面5は、第1側辺1aと、第2側辺2aと、第3側辺3aと、第4側辺4aとによって形成される。第1側辺1aと第2側辺2aとが接続された第1接続部1b、および第3側辺3aと第4側辺4aとが接続された第3接続部3bのそれぞれ近傍において発光素子6aが設けられている。
(もっと読む)
カラーフィルタ基板の欠陥検査方法
【課題】従来の標高計算は局所領域のミスマッチングによる誤差が生じ、精度の高い標高情報が得られず、多大な処理時間がかかるという問題点がある。
【解決手段】カラーフィルタ基板上の局所領域の標高をステレオ方式で算出し欠陥判定をする欠陥検査方法において、ステレオ画像の一方の撮像画像である基本画像から局所領域を検出する工程、ステレオ画像の他方の撮像画像であって局所領域を含む参照画像を取得する工程、局所領域を含むマッチング領域をステレオ画像から選定する工程、マッチング領域から基準マークとなる部位を選定する工程、局所領域を鮮明化する工程、鮮明化された局所領域の中心座標を求め、基準マークからの距離を算出する工程、基本画像と参照画像における局所領域間の視差を求める工程、局所領域の標高を算出する工程、とを含むことを特徴とするカラーフィルタ基板の欠陥検査方法。
(もっと読む)
三次元測定対象物の形態調査方法
【課題】レーザー走査装置により三次元測定対象物の形態を正しく測量し、調査する。
【解決手段】三次元測定対象物の形態調査方法であって、レーザー走査装置が調査範囲にレーザーを照射したとき、該レーザーの多数の反射点の各点を、三次元座標化された点として取得し、前記調査範囲の水平面上に多数のグリッドを派生させ、各グリッドの中にある点群の鉛直座標分布から標高値の最も低い低位点を抽出し、各グリッドで抽出された低位点を用いて調査範囲の地形モデルを作成する。
(もっと読む)
乾式ガスホルダーのピストンの監視方法および監視装置
【課題】ピストンの傾斜のみならず偏心も監視することにある。
【解決手段】内部にガスを収容するために上下方向へ延在する筒状のホルダー本体と、そのホルダー本体内に昇降可能に配置された落し蓋状のピストンと、そのピストンの周縁部とホルダー本体の内周面との間の隙間を気密にシールするシール機構とを具える乾式ガスホルダーの、前記ピストンの監視方法において、前記ピストンの中心から等距離なそのピストン上の少なくとも3箇所の位置にそれぞれピストンの上面から所定高さ突出した所定の大きさの偏心量測定テーブルを設け、前記ホルダー本体の上端部に、前記偏心量測定テーブルまでの高さ方向距離を非接触で計測する距離計を設け、前記距離計で計測した当該距離計から前記少なくとも3箇所の偏心量測定テーブルまでの高さ方向距離に変化が生じた場合に、その変化が急激な場合は前記ピストンに偏心が生じたと判断し、その変化が穏やかな場合は前記ピストンに傾斜が生じたと判断することを特徴とするものである。
(もっと読む)
施工補助装置、施工補助方法
【課題】建築物の施工、解体、デザインの製作など、幅広い意味での施工を必要とする施工領域における面積を簡便に算出すると共に、必要となる作業量、作業時間、コスト、材料、素材、材料や素材の量、必要となる機器の種類や大きさなどを推測できる、施工補助装置を提供する。
【解決手段】施工補助装置は、施工対象物100の画像に基づいて、施工対象物100の所定領域の面積を算出する面積算出手段と、施工対象物100の周辺情報を記憶する第1記憶部と、施工対象物100の施工に必要となる要素である施工要素を記憶する第2記憶部と、所定領域の面積、周辺情報および施工要素の少なくとも2以上に基づいて、施工対象物100の施工特性を算出する算出手段と、を備える。
(もっと読む)
3次元座標位置推定装置、その方法、そのプログラムおよび3次元座標推定システム、ならびに、カメラ較正情報生成装置
【課題】マーカを複数のカメラで撮影したそれぞれの画像からマーカの3次元座標位置を推定する3次元座標位置推定装置を提供する。
【解決手段】3次元座標位置推定装置1は、少なくとも30台以上のカメラによって撮影されたカメラ画像を入力する画像入力手段11と、カメラごとに、カメラ画像からマーカの2次元座標位置を検出する点光源(マーカ)検出手段12と、カメラパラメータに基づいて、全カメラ共通の座標系において、カメラごとに、点光源(マーカ)検出手段12で検出された2次元座標位置と、当該カメラの光学中心とを結ぶ直線式を算出する点光源(マーカ)方向算出手段13と、カメラごとの直線式との距離の総和が最小となる位置を、マーカの3次元座標位置として算出する距離最小位置算出手段14と、を備えることを特徴とする。
(もっと読む)
21 - 40 / 2,728
[ Back to top ]