
Fターム[2F065JJ05]の内容
光学的手段による測長装置 (194,290) | 受光部 (23,546) | 複数の受光部 (2,728)
Fターム[2F065JJ05]に分類される特許
201 - 220 / 2,728
三次元モデリング装置、三次元モデリング方法、ならびに、プログラム
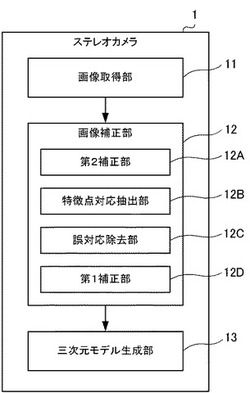
【課題】ズーム機能を用いた場合であっても、精度よく三次元モデルを作成する。
【解決手段】画像取得部11は、ペア画像を取得する。特徴点対応抽出部12Bは、画像取得部11が取得したペア画像のそれぞれの画像から、特徴点対応の組を抽出する。誤対応除去部12Cは、特徴点対応抽出部12Bによって抽出された特徴点対応の組において、垂直座標の差が所定値以上ある組を誤対応として除去する。第1補正部12Dは、誤対応が除去された後の特徴点対応の組の垂直座標に基づいて、画像取得部11が取得したペア画像を、三次元モデル作成に適した画像に補正する。三次元モデル生成部13は、画像取得部11が取得し、画像補正部12が補正したペア画像から、被写体の三次元モデルを生成する。
(もっと読む)
パターン光投影装置及び方法

【課題】振動ミラーにより光ビームを走査することで対象物上に光のパターンを投影する三次元形状計測装置において、投影する光のパターンの環境条件等による変化を補償する。
【解決手段】MEMSミラー14で走査されるスリット光が実効的な走査範囲のA端を通るタイミングを光ファイバ20A及び光検出器36Aにより検出する。時間間隔計測部38は、往復走査されるスリット光がA端を通過するタイミング同士の時間間隔を計測する。走査角度判定部40は、計測された時間間隔に対応する走査角度変化パターンを求め、そのパターンからレーザー駆動信号の位相に対応する走査角度を求める。変調パターン信号生成部42は、求められた走査角度に対応するレーザー発光強度を投影パターンから求める。レーザー駆動回路32は、求められたレーザー発光強度に従って、レーザー10の発光を制御する。
(もっと読む)
画像処理方法及び画像処理装置
【課題】種々の形状のマークの識別を可能とする。
【解決手段】電子部品Cを基板Kに実装する際に、電子部品又は基板に付されたマークMを撮像した撮像画像データによるマークの識別に用いられる画像処理方法であって、マークの撮像画像データから当該マークの中心位置を特定する中心特定工程と、マークの中心位置からマークの撮像画像データの極座標変換データを取得するデータ変換工程と、極座標変換データにおける背景とマークとの境界線の形状的特徴からマークの形状を判別する形状判別工程と備えている。
(もっと読む)
対象物の認識システム、見守りシステム、監視システム
【課題】エネルギ照射装置と2次元撮像装置を用いることで、種々の条件下で頑健に動作する対象物認識システムおよび見守りシステム、監視システムを提供する。
【解決手段】観測対象となる空間に向けて、所定の位置から照射方向を変えながら、エネルギを照射する照射手段と、照射手段で照射されたエネルギの反射エネルギを2次元的に感知し、対象となる空間を2次元的に撮像する撮像手段と、撮像手段で撮像した撮像画像上の切断曲線の特徴を用いて対象物の認識を行う認識手段とを備える対象物認識システムおよび該システムを備える見守りシステム、監視システム。
(もっと読む)
平坦度検出装置、および平坦度検出方法
【課題】簡単な構成で容易に平坦度を検出可能な平坦度検出装置、および平坦度検出方法を提供する。
【解決手段】平坦度検出装置1は、三次元測定装置2から計測データを取得する計測データ取得手段141と、検査対象計測面上の第一計測点を取得する第一計測点取得手段143と、第一計測点から検査対象計測面の幾何形状式を算出する第一形状算出手段144と、計測データから隣接計測面に属する第二計測点を取得する第二計測点取得手段145と、第二計測点から隣接計測面の幾何形状式を算出する第二形状算出手段146と、検査対象計測面および隣接計測面の交線または交点を算出する外周縁算出手段147と、交線または交点に基づいて補正検査対象計測面の幾何形状式を算出する補正計測面算出手段148と、補正検査対象計測面の幾何形状式に基づいて検査対象面の平坦度を検出する平坦度検出手段149と、を具備した。
(もっと読む)
透光性管状物体の厚さ測定装置
【課題】 透光性管状物体の厚さを全域にわたって短時間で精度よく測定する。
【解決手段】 シリンドリカルレンズ59が、ガラス管Gに出射されるレーザ光をY軸線方向に集光させて、ガラス管GにX軸線方向に延びたライン状のレーザ光を照射する。Y軸方向サーボ回路119は、4分割フォトディテクタ62及びY軸方向エラー信号生成回路118によって検出されたY軸方向エラー信号を用いて、ガラス管Gに照射されるライン状のレーザ光がガラス管Gの中心軸に照射されるようにガルバノミラー56を回転駆動するモータ57をサーボ制御する。また、Y軸周り角度サーボ回路122は、4分割フォトディテクタ62及びY軸周り角度エラー信号生成回路121によって検出されたY軸周り角度エラー信号を用いて、ガラス管Gに照射されるライン状のレーザ光がガラス管Gの中心軸に垂直に照射されるようにガルバノミラー54を回転駆動するモータ55をサーボ制御する。
(もっと読む)
光学式位置検出装置および入力機能付き表示システム
【課題】広い範囲にわたって対象物体の三次元的な位置を光学的に検出することのできる光学式位置検出装置、および入力機能付き表示システムを提供すること。
【解決手段】光学式位置検出装置10において、光源部12が検出光L2をXY面に沿って放射状に出射した際、第1受光部13は、検出対象空間10Rに位置する対象物体Obで反射された検出光L2を受光し、第1受光部13での受光強度に基づいて対象物体ObのXY座標データを検出する。第1受光部13に対してZ軸方向で離間する位置には第2受光部14が設けられ、かかる第2受光部14も、対象物体Obで反射された検出光L2を受光する。その際、第1受光部13での受光強度と、第2受光部14での受光強度との差や比等の比較結果は、対象物体ObのZ軸方向の位置によって変化するので、かかる比較結果に基づいて対象物体ObのZ軸方向の位置を検出する。
(もっと読む)
基板外観検査装置における基板幅寄せ搬送機構
【課題】コスト削減を図りつつ、被検査基板を正しい搬送姿勢のもとで汚さずに搬送することができるほか、耐久性にも富む基板外観検査装置における基板幅寄せ搬送機構の提供。
【解決手段】被検査基板51を搬送する一対の無端搬送ベルト13,14と、基板搬送面19を間に挟んで配置される基準側基板ガイド23と可動側基板ガイド33とを備え、基準側基板ガイド23の内側面24には、前上がりのガイド斜面26を設け、可動側基板ガイド33の前部内側面34aには、その面高が後部内側面34bの面高より低い段差面36を設け、該段差面36には、前傾させて縦列配置した複数個の薄板ばね材38からなる弾性当接部37を配設し、該弾性当接部37を介して基準側基板ガイド側に幅寄せしながら被検査基板51の向きと位置とを正して検査カメラ42方向への送り込みを可能とした。
(もっと読む)
タイヤ形状検査装置、及びタイヤ形状検査方法
【課題】ショルダ部を含めてタイヤの表面形状を検出することができるようにする。
【解決手段】タイヤ形状検査装置は、タイヤのトレッド部8に対してライン光を照射する第1ライン光照射手段10と、タイヤのサイドウォール部7に対してライン光を照射する第2ライン光照射手段12と、タイヤのショルダ部9から当該ショルダ部9を超えた領域までライン光を照射する第3ライン光照射手段13と、第1ライン光照射手段10、第2照射手段及び第3ライン光照射手段13が照射してタイヤ表面で反射したライン光を撮像する撮像手段16とを備える。
(もっと読む)
表示装置及びナビゲーション装置
【課題】描画対象の画像データを増大させることなく、実空間の光源環境条件に合わせて描画対象の画像を表示することができる表示装置を提供する。
【解決手段】表示モニタ8周辺の光源環境情報を検出する複数の光源方向検出モジュール4と、複数の光源方向検出モジュール4で検出された光源環境情報から、表示モニタ8周辺の実空間の光源環境条件を示す情報を算出する光源方向演算部6と、光源方向演算部6で算出された実空間の光源環境条件を示す情報に基づいて、表示モニタ8で表示する仮想描画空間の光源環境条件を実空間に合わせて、描画対象の画像を表示モニタ8に表示する描画部7とを備える。
(もっと読む)
情報処理方法、眼窩下点の位置推定方法、フランクフルト平面の算出方法および情報処理装置
【課題】被測定者の負担が少なく、かつ簡便な方法によって、眼窩下点などの解剖学的特徴点の位置を推定する方法および装置を提供する。
【解決手段】人(被測定者)の頭部の皮膚表面より、目頭点ENT、目尻点ECT、目頭点ENTの側の眼裂と眉との間の凹部にあたる瞼点PLP、および耳珠上縁点の座標をそれぞれ取得する。取得された目頭点ENT、目尻点ECTおよび瞼点PLPを通る仮想球面SPHの最下点の座標を算出することで眼窩下点ORBの位置を推定する。そして、一または二の眼裂に関する眼窩下点ORBおよび一または二の耳珠上縁点を含む少なくとも3点の座標に基づいてフランクフルト平面を算出する。
(もっと読む)
光学式位置検出装置および入力機能付き表示システム
【課題】広い範囲にわたって対象物体の位置を光学的に検出することのできる光学式位置検出装置、およびかかる光学式位置検出装置を備えた入力機能付き表示システムを提供すること。
【解決手段】光学式位置検出装置10では、光源部12は、検出光L2を放射状に出射するとともに、検出光L2の放射角度範囲において一方側から他方側に向かって強度が変化する光強度分布を形成し、受光部13は、光強度分布が形成された検出対象空間10Rに位置する対象物体Obで反射した検出光L2を受光する。光源部12では、フレキシブル配線基板181を利用して、発光素子120が位置する角度方向には発光素子120と受光部13との間に遮光部185が設けられており、発光素子120の間に透光部186が設けられている。
(もっと読む)
画像色彩補正装置及び画像色彩補正方法
【課題】光源によらない一定の色に補正できる画像色彩補正装置を提供する。
【解決手段】本発明における画像色彩補正装置1は、測定対象物2と複数のカラーコード付き標識CTを同時に又は別時に異なる複数方向から撮影する撮影部3と、撮影部3により撮影されたカラーコード付き標識CTの撮影画像から、位置検出用パターンP1の位置を求める位置検出部51と、撮影画像から基準色パターンP2を抽出する基準色パターン抽出部52と、撮影画像からカラーコードパターンP3を抽出するカラーコードパターン抽出部53と、基準色パターン抽出部で抽出された基準色パターンのうち、少なくとも光源色補正に用いる色彩を用いて、撮影画像の光源色補正を行う色補正部71とを備える。
(もっと読む)
3次元計測方法
【課題】平面精度が低い基板上に生成された、直径数十ミクロン程度のサイズのバンプの3次元計測を可能とする。
【解決手段】測定対象に固有の傾斜角で固有の色相光を投光し、固有の傾斜角で傾斜した視軸のカラーラインセンサカメラで撮像し、得られた画像画素の色相光反射強度基準化比率から、測定対象の表面パッチ傾斜角を算出し、表面パッチ傾斜角から表面パッチの高さを算出する3次元計測法において、まず光拡散表面を有する球状モデルを対象として、色相光反射強度基準化比率と表面傾斜角の対応表を作成し、未知の測定対象を撮像した画像画素の色相光反射強度基準化比率から表面パッチの傾斜角を算出し、傾斜角から表面パッチの高さを算出し、これをスキャン方向に沿って加算して縦断面高さデータを算出し、縦断面高さデータを対象横幅に亘って集積して、未知の測定対象の3次元計測を行う。
(もっと読む)
光学式検出装置、表示システム及び情報処理システム
【課題】従来よりも小型な構成で対象物の位置を検出することができる光学式検出装置、表示システム及び情報処理システム等を提供すること。
【解決手段】光学式検出装置100は、照射光LTを出射する照射部EUと、照射光LTが検出エリアRDETに存在する対象物OBに反射されることによる反射光LRを受光する受光部RUと、受光部RUの受光結果に基づいて対象物OBの位置情報を検出する検出部110とを含む。照射部EUは、照射部EUの一端から検出エリアRDETに対して出射される第1の照射光と、照射部EUの他端から検出エリアRDETに対して出射される第2の照射光と、照射部EUの一端と他端との中間部から検出エリアRDETに対して出射される第3の照射光とがそれぞれに交差し、且つ、第1、第2、及び第3の照射光のそれぞれの強度が異なるように、照射光LTを出射する。
(もっと読む)
検測車動揺補正方法及び装置、並びに検測方法及び装置
【課題】検測車走行時における車体動揺(ローリング及びヨーイング等)の影響を受けることなく検測できるようにする。
【解決手段】検測装置はレールに沿って走行する検測車両に搭載されており、車両の運行に関する周辺構造物の状態(サードレールの高さ)を測定する。検測車両には、検測車両の走行中に車両自体がレールに対して動揺する状態(車両のローリング及びヨーイング等)を測定する動揺状態測定手段が搭載されている。検測装置は、動揺状態測定手段によって測定された検測車両の動揺状態に基づいてその検測結果を補正する。これによって、検測装置は検測車走行時における車体動揺(ローリング及びヨーイング等)の影響を受けることなく正確な検測を行うことができる。
(もっと読む)
光学式位置検出装置および入力機能付き表示システム
【課題】受光素子に対する電気ノイズに対する影響を阻止することにより、誤検出の発生を防止することのできる光学式位置検出装置、および当該光学式位置検出装置を備えた入力機能付き表示システムを提供すること。
【解決手段】光学式位置検出装置において、受光部13は、検出光が放射状に出射された検出対象空間に位置する対象物体で反射した検出光を受光する。受光部13には、受光素子130の受光面131を部分的に覆うシールド部材14が設けられている。シールド部材14において、入射部140は、受光面131に対する法線方向から一方側および反対側に傾くに伴って幅広になっている。従って、受光素子130での受光強度は、受光面131に対する法線方向から入射した検出光と、受光面131に対する法線方向から傾いた斜め方向から入射した検出光とにおいて差が小さい。
(もっと読む)
不良検出システムの改良
【課題】パターンを形成したウェハの検査において、表面の内部もしくは表面上の異常の有無を判定できる表面検査法を提供する。
【解決手段】サンプル表面20aからの散乱光は表面20aに対して垂直な線に対して略対称の光を集束する集束器38,52によって集束される。集束光は、異なる方位角で経路へと導かれ、集束した散乱光の線に対する相対的方位角位置に関する情報が保存される。集束光は、垂直な線に対して異なる方位角で散乱した光線を表すそれぞれの信号に変換される。異常の有無および/または特徴は、この信号から判定される。あるいは、集束器38,52によって集束された光線は、予測されるパターン散乱の角度差に対応する角度の環状ギャップを有する空間フィルタによって濾波され、狭角および広角集束経路から得た信号は比較され、マイクロスクラッチと粒子との間を識別する。
(もっと読む)
膜厚むら検査装置及び方法
【課題】検査に適切な明るさやコントラストの画像を取得し、膜厚むら検査装置及び方法を提供する。
【解決手段】表面に皮膜が形成された基板を一方向に移動させながら、基板に形成された皮膜の膜厚むらを検査する装置及び方法であって、皮膜の厚みを検出する膜厚検出部を備え、光源部は、撮像部側に配置された反射照明部3aと、基板を挟んで撮像部に対向する位置に配置された透過照明部3bを備え、撮像部4は基板との相対角度を調節する撮像部角度調整手段を備え、反射照明部は反射照明部と基板との相対角度を調節する反射照明角度調整手段を備え、透過照明部は透過照明部と基板との相対角度を調節する透過照明角度調整手段を備え、膜厚検出部からの膜厚情報に基づき、反射照明角度調節手段及び透過照明角度調整手段を制御し、反射照明の光量及び透過照明の光量を調節する制御部を備えたことを特徴とする膜厚むら検査装置及び方法。
(もっと読む)
マルチカメラのキャリブレーション用全周フィールド
【課題】マルチカメラをキャリブレーションする場合の被写体であって、カメラごとに被写体を移動させることなく、高精度なマルチカメラのキャリブレーションが可能な全周フィールドおよびその撮影方法を提供する。
【解決手段】全周フィールドは、基準方向に光軸を有する基準カメラ11と、基準方向とは異なる方向に光軸を有する他のカメラ12とを有するマルチカメラ10aで撮影し、キャリブレーションするための全周フィールド1であって、マルチカメラ10aの内部パラメータまたは外部パラメータを測定するために撮影される、全周フィールド1内に配置された、三次元座標が既知の複数のターゲットを備える。基準方向から所定の角度範囲においては、ターゲットが第1の密度で配置され、基準方向から所定の角度範囲の範囲外においては、ターゲットが第1の密度よりも高い第2の密度で配置される。また、全周フィールド1の法線は、少なくとも2方向を有する。
(もっと読む)
201 - 220 / 2,728
[ Back to top ]