
Fターム[2F065JJ26]の内容
光学的手段による測長装置 (194,290) | 受光部 (23,546) | 1つの受光部の素子数 (9,727) | 多数 (6,943) | 2次元状 (5,630)
Fターム[2F065JJ26]に分類される特許
321 - 340 / 5,630
欠陥検査装置および欠陥検査方法
【課題】欠陥検査工程における未検査を抑制すること。
【解決手段】ウエハを保持するステージ12と、前記ステージに保持されたウエハのアライメントを行なうアライメント部32と、アライメントされた前記ウエハ表面の欠陥を検査する検査部34と、前記アライメント部が前記アライメントを開始してから前記欠陥の検査が終了するまでの時間である検査時間が所定時間より短い場合、前記アライメント部に前記アライメントを再度行なわせ、前記検査部に前記欠陥を再度検査させる制御部36と、を具備する欠陥検査装置。
(もっと読む)
断面積測定装置、プログラム

【課題】測定対象物の断面積を精度良く測定する。
【解決手段】変位測定装置では、測定対象物が載置されている範囲を含む変位測定範囲の変位を測定し、測定された変位に平準化処理を実行して第1処理情報を生成し、第1処理情報から断面積測定範囲を決定する。変位測定装置は、断面積測定範囲における前記変位情報から測定対象物の断面積を検出する。第1処理情報から断面積測定範囲を決定することで、配線パターン等などによって生じるノイズを除去することができ、断面積測定範囲を正確に決定することができる。
(もっと読む)
平面度測定装置
【課題】シャック−ハルトマンの波面センサを用いた平面度測定装置において、測定精度及び領域分解能を向上させる。
【解決手段】平行化が可能な光束である一次光束B1を射出する光源1と、前記光源1から射出された一次光束B1を前記測定対象領域ARに導いて反射させ、その反射した光束である二次光束B2を、平面状の波頭を有する光束として出力する導光手段2と、前記導光手段2から出力された二次光束B2と直交するように設けられたレンズアレイ3と、前記レンズアレイ3を構成する各レンズの入射側光軸上に設けられて、各レンズに入射する光径をレンズの径よりもそれぞれ小さくするアパーチャ部材4と、前記レンズアレイ3を通ってレンズ毎に分離された光である分離光Dを検出する光検出手段5と、前記光検出手段5で得られた各分離光Dの位置又は傾きに基づいて、前記測定対象領域ARの平面度に係る値を算出する平面度算出部6とを設けるようにした。
(もっと読む)
液体吐出装置、体積測定方法、検査部材
【課題】吐出された液体の体積を精度よく測定する。
【解決手段】吐出手段101から吐出される液体200を表面張力を用いて凸状に保持する保持面部121と、保持面部121の周囲に形成され、保持面部121からの液体200の流出を抑止する抑止面領域122とを備える検査部材102と、保持面部121に保持される液体200の形状に関する情報である形状情報を取得する形状情報取得手段103とを備える。
(もっと読む)
対象物検出装置
【課題】対象物検出装置は、画像に所定の対象物が含まれていることを検出するために、一定の処理量が必要となるパターン認識処理を行う。このパターン認識処理に必要となる処理量は、従来の対象物検出装置において比較的大規模なものとなっている。よって、このパターン認識処理における処理量を削減したいという要望がある。
【解決手段】撮像装置群が撮影する2枚1組のステレオ画像に写っている被写体における視差を利用して、画像を構成する画素毎に、被写体までの距離を算出する。そして、画像に写っている被写体のうち、背景よりも手前に写っている被写体の部分の画素群を抽出する。さらに、これら抽出した被写体の部分の画素群に対して、統計的学習に基づくパターン認識処理を行い、これら抽出した被写体の部分の画素群の中に、予め定められた所定の対象物が被写体として含まれていることを検出する。
(もっと読む)
形状測定装置並びに深さ測定装置及び膜厚測定装置
【課題】試料表面の変位量が大きくても、フェーズラッピングの問題が生ずることなく、試料の微細な表面形状を高分解能で測定できる形状測定装置を実現する。
【解決手段】白色光源から出射した照明光は、入射光をシャーリングする第1の光路と入射光に対して可変光路長ないし可変位相量を導入してフリンジスキャンを行う第2の光路とを有する干渉光学系及び対物レンズを経て試料に入射する。試料上には、シャーリングされた参照ビームにより形成される第1の照明領域とフリンジスキャンされた測定ビームにより形成される第2の照明領域が形成される。第1及び第2の照明領域から出射した反射光は、対物レンズ及び干渉光学系を介して2次元撮像装置に入射し、2つの照明領域の画像が合成された干渉画像が形成される。フリンジスキャンにより、2つの画像を構成する反射光間に白色干渉が発生し、干渉信号を検出することで、試料の形状又は孔の深さが測定される。
(もっと読む)
撮像装置およびその制御方法
【課題】表面形状の計測処理を効率的に行い、撮像装置のスループットを向上させる技術を提供する。
【解決手段】撮像装置が、被写体を保持する保持手段と、前記被写体の表面形状を計測する表面形状計測手段と、前記表面形状計測手段により計測された表面形状に合わせて撮像面を調整して、前記被写体の撮像を行う撮像手段と、前記被写体の全体領域のなかから撮像すべき対象物が存在する存在領域を特定する特定手段とを備える。前記表面形状計測手段は、前記特定手段により特定された存在領域の表面形状のみを計測する。
(もっと読む)
測距装置
【課題】対象物が存在する路面の勾配の影響を適切に補償しつつ、車載カメラによる撮像画像を用いて対象物と自車両との間の距離を精度よく測定することができる測距装置を提供する。
【解決手段】互いに異なる撮像時刻での車載カメラ2の2つの撮像画像から、自車両1からの距離が第1撮像画像の撮像時刻での対象物53の接地点P53と同じになる静止点Pの投影点となる特徴点を抽出する。計測したカメラ運動パラメータと、各撮像画像の特徴点の位置と、車載カメラ2の高さHcの値とから、車載カメラ2の下方に位置する路面51上の点から対象物存在路面52上の静止点に至る直線L2が車載カメラ2の光軸Lcに対してなす角度θを所定の演算式に基づいて推定する。角度θの推定値を用いて対象物53と自車両1との間の距離Dを推定する。
(もっと読む)
変位測定装置、プログラム
【課題】測定対象物の変位情報を精度良く測定する。
【解決手段】変位測定装置では、ガラス板及び測定対象物に対して垂直方向に光を出射し、当該光と同軸方向に反射される反射光を複屈折性のクリスタル及び偏光板を用いて受光し、反射光に含まれる各反射光成分に応じた反射面の変位の複数個を、各反射光成分の反射強度に関連付けて検出する。変位測定装置では、検出される変位のうち、最も高い反射強度の得られた変位Z1と、変位Z1の次に高い反射強度の得られた変位Z2と、の差である差分変位をガラス板の同軸方向の厚さに設定された基準変位ZKと比較し、差分変位が基準変位ZKよりも小さい場合、変位Z1を測定対象物までの変位Zと判断し、差分変位が基準変位ZK以上である場合、変位Z1と変位Z2のうちの短いものを測定対象物までの変位Zと判断する。
(もっと読む)
カメラキャリブレーション装置
【課題】車両の停車誤差の影響を排除できるキャリブレーションを簡易な設備で実施する。
【解決手段】自車12の形状に対応した2点と交わる線を含み、カメラ10の撮像範囲内に少なくとも2本配置される参照線RLと、この参照線RLの間に予め定められたパターン形状を有する校正用パターンPPとを有する測定領域MAと、画像処理部14とを備えている。そして、画像処理部14が、カメラ10で校正用パターンPP及び参照線RLが配置される測定領域MAを撮影することで前記測定用画像IMを生成する撮像処理18と、前記2本の前記参照線RLに基づいて前記自車12の停車位置と前記パターン形状との座標関係を停車誤差として算出する停車誤差算出処理20と、当該停車誤差をキャンセルした状態で前記パターン形状に基づいて前記カメラ10の取付姿勢に対応する外部パラメータを算出する外部パラメータ算出処理22とを備えた。
(もっと読む)
部品高さ測定方法およびその装置
【課題】
周辺を壁で囲まれた凹型形状の被測定部品においても、内側形状を正確に計測することで、被測定部品の高さ及び体積を求めることができるようにする。
【解決手段】
載置面上に被測定部品を載置して被測定部品の高さ方向に移動可能なテーブルの載置面に垂直な方向から載置面上に載置された被測定部品に対物レンズを介して光パターンを投影し、テーブルを被測定部品の高さ方向に順次スッテプ移動させて各ステップ移動ごとに光パターンが投影された被測定部品を対物レンズを介して撮像して光パターンの画像を取得し、テーブルの各ステップ移動ごとに撮像して取得した光パターンの複数の画像を処理して被測定部品の各部の高さ情報を得て被測定部品の高さ画像または高さ情報を含む画像を生成して部品高さを測定するようにした。
(もっと読む)
画像処理装置、そのプログラム、および画像処理方法
【課題】ブロックマッチングにより探索される対応点の信頼度を改善する。
【解決手段】画像処理装置は、第1画像上に予め設定された注目点を空間的に内包する第1基準ブロックと、第2画像上に設定された複数の第1参照ブロックのそれぞれとの画像内容の類似度をそれぞれ表現した複数の第1指標値を取得する第1演算部と、該複数の第1指標値に基づいて、注目点に対応した対応点の複数の候補点を前記第2画像においてそれぞれ抽出する抽出部と、複数の候補点をそれぞれ空間的に内包する複数の第2基準ブロックのそれぞれと、第1画像上の第2参照ブロックとの第2ブロックマッチングにより、複数の候補点のそれぞれについて、対応点としての選択の適性を表現した複数の第2指標値を取得する第2演算部と、該複数の第2指標値に基づいて、複数の候補点の中から1つを選択することにより、対応点を決定する決定部とを備える。
(もっと読む)
画像処理装置、画像処理方法、およびプログラム
【課題】処理時間を低減することができる画像処理装置、画像処理方法、およびプログラムを提供する。
【解決手段】モニタ22は、計測対象物の画像と、計測対象物に対応する物体であって予め算出された3次元形状を有する物体の画像とを表示する。CPU34cは、リモコン23を介して入力される指示に基づいて、計測対象物の画像上の第1の点と物体の画像上の第2の点とを指定する。CPU34cは、第1の点を基準とする第1の図形と、第2の点を基準とする第2の図形との幾何学計算を行い、幾何学計算の結果に基づいて、計測対象物の画像と物体の画像との少なくとも一方の姿勢または位置を調整する。CPU34cは、姿勢または位置が調整された後、リモコン23を介して入力される指示に基づいて指定された計測位置に対応する物体上の空間座標を算出し、算出した空間座標に基づいて、物体のサイズを算出する。
(もっと読む)
露光装置及び露光方法、並びにデバイス製造方法
【課題】従来の干渉計に比べて高精度な移動体の位置情報の計測を可能にする。
【解決手段】露光装置は、基板を保持して、XY平面内で移動し、XY平面に交差する反射面134を有するステージWSTと、計測装置20Y’とを備えている。計測装置は、ステージWSTの上方に配置され反射面134を介して入射した光ビームを回折させて反射面134に戻す固定スケール135と、反射面134に戻された光ビームを検出する検出部(124A、124B、126、28)と、を有する。計測装置は、固定スケール135からの戻りビームを、再度反射面134を経由させることで得られる前記光ビームの複数の回折ビームの干渉光を前記検出部で検出することで、ステージWSTのY軸方向の位置を計測する。
(もっと読む)
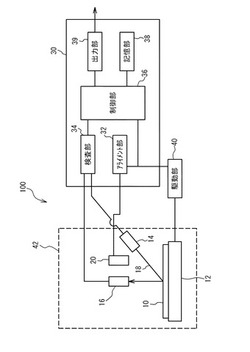
物体までの距離を測定するためのシステムおよび方法
【課題】1つまたは複数の物体の画像から得ることができる、距離測定の予測精度を反映している信号を提供する。
【解決手段】物体14までの距離12を測定するためのシステム10が、ある位置に配置されたカメラ16と、カメラ16の設定を反映した信号30,32,34とを備える。カメラ16に作動可能に接続された制御装置18が、信号を受信し、信号に基づいて精度信号36を生成する。精度信号36は、距離測定の予測精度を反映している。制御装置18に作動可能に接続された表示器38,42が、精度信号36を反映している表示を提供する。距離測定の方法は、カメラを配置するステップ、距離測定の予測精度を反映している信号を生成するステップ、信号を反映している表示を提供するステップ、その位置で物体の1つまたは複数の画像を撮影するステップと、その1つまたは複数の画像に基づいて、物体までの距離を計算するステップとを含む。
(もっと読む)
道路勾配推定装置
【課題】片側の白線のみからでも車両前方の道路の道路勾配を推定可能な道路勾配推定装置を提供する。
【解決手段】画像処理部4で抽出した白線が破線であるとき、その白線のペイント部分と非ペイント部分の境界である端点を抽出する端点抽出部6と、視点変換処理を行い、車両前方の道路の道路勾配が、車両が走行している位置での道路勾配で一定であると仮定したときの各端点の見かけ上の位置を求める視点変換処理部7と、隣り合う端点間の見かけ上の距離と、予め求めた隣り合う端点間の実際の距離とに基づき、各端点間の勾配を求める端点間勾配取得部9と、端点間勾配取得部9が求めた各端点間の勾配に、車両が走行している位置での道路勾配を足し合わせることで、端点間の実際の道路勾配を求める道路勾配演算部10と、を備えた。
(もっと読む)
3次元形状測定装置
【課題】3次元形状測定装置を提供すること。
【解決手段】3次元形状測定装置は、光を発生する光源ユニットおよび光源ユニットから発生された光を格子パターンを有する格子パターン光に変更する格子ユニットを含み、格子パターン光を所定方向から測定対象物に照射する照明部、および格子ユニットを格子パターンの延長方向および格子パターンの配置方向に対して所定の傾斜方向に移送させる格子移送ユニットを含む。よって、製造コストを低減して、3次元形状測定装置は容易に管理することができる。
(もっと読む)
位置姿勢出力装置、位置姿勢出力プログラム及び位置姿勢出力方法
【課題】移動体の正確な位置および姿勢を時間遅れなく出力する。
【解決手段】位置姿勢出力装置10は、移動体のオドメトリを計算する計算部3から、オドメトリを第1の間隔で取得する。オドメトリ及びオドメトリ以外の情報を用いて移動体の位置及び姿勢を推定する推定部5から、移動体の位置及び姿勢の推定結果を第1の間隔より長い第2の時間間隔で取得する。移動体の位置及び姿勢の推定結果が取得された場合に、更新後の移動体の位置及び姿勢の値が、オドメトリの差分に基づく位置及び姿勢と、移動体の位置及び姿勢の推定結果との間に遷移するように、記憶部13に記憶された移動体の位置及び姿勢を更新する。オドメトリが第1の間隔で取得される度に、当該オドメトリと今回の推定に用いられたオドメトリとの差分を記憶部13に記憶された移動体の位置及び姿勢に足し合わせた上で出力する。
(もっと読む)
孔形状検査方法および孔形状検査プログラム
【課題】被検出形状に縁部における輝度変化を除去し、欠けや異物の検出を確実に行える孔形状検査方法および孔形状検査プログラムを提供する。
【解決手段】孔形状良否を判定する孔形状検査方法およびプログラムであって、前記孔の孔形状撮像工程と、前記孔形状画像の2値化画像形成工程と、前記孔の面積が既定値であるかを判定する孔面積判定工程と、前記孔の内形状の孔重心を求める孔重心演算工程と、前記孔形状画像に前記孔重心を中心とする同心フィルターをかけ、前記孔重心を中心とする同心形状上の画素の平均輝度と、1画素の画素輝度と、の差によるフィルタリング画像形成工程と、前記フィルタリング画像の2値化フィルタリング画像形成工程とを有し、前記2値化フィルタリング画像の画素数が所定の値以下である場合、前記孔を良品と判定する良否判定工程を有する孔形状検査方法、およびその検査方法をコンピューターに実行させるプログラム。
(もっと読む)
検出装置、露光装置、および、デバイスの製造方法
【課題】被検物(例えば、基板の裏面と表面とに形成されたマーク)の位置を高精度に検出することができる技術を提供する。
【解決手段】被検体の位置を検出する検出装置であって、前記被検体を第1波長帯域及び前記第1波長帯域とは異なる第2波長帯域を含む光で照明する照明系と、前記被検体からの光により前記被検体の像を形成する結像系と、前記被検体の像を撮像する撮像素子と、前記照明系又は前記結像系の光路における前記第1波長帯域の光に対する透過率と前記第2波長帯域の光に対する透過率とを異ならせることで、前記撮像素子で撮像される前記被検体の像を形成する前記第1波長帯域の光の強度と前記撮像素子で撮像される前記被検体の像を形成する前記第2波長帯域の光の強度との強度差を低減する光学部材と、を有することを特徴とする検出装置を提供する。
(もっと読む)
321 - 340 / 5,630
[ Back to top ]