
Fターム[2F065JJ26]の内容
光学的手段による測長装置 (194,290) | 受光部 (23,546) | 1つの受光部の素子数 (9,727) | 多数 (6,943) | 2次元状 (5,630)
Fターム[2F065JJ26]に分類される特許
241 - 260 / 5,630
情報処理装置及び情報処理方法
【課題】計測装置と計測対象物体との間の位置または/及び姿勢の関係があいまい性を含んだ場合であっても、高精度に物体の位置姿勢を計測できるようにする。
【解決手段】撮像時刻におけるロボットのモーション情報から、撮像装置と対象物体の位置姿勢移動量に変換して計測データとして位置姿勢更新に用いる。ロボットのモーション差分という確度の高い情報を計測データとして加えることにより、精度および安定性を向上させるようにする。また、撮像時刻の異なる距離画像と濃淡画像の幾何的関係を、ロボットアームの軌跡情報を用いて求めることで、両者の情報を同時に利用して位置姿勢推定を行うようにすることにより、全体のデータを同時に用いることを可能にする。
(もっと読む)
3次元測定装置、3次元測定方法及びプログラム

【課題】測定対象物が明るさ(色)の異なる複数の領域を有している場合に、適切にその測定対象物を3次元測定することができる3次元測定装置等の技術を提供すること。
【解決手段】本技術の一形態に係る3次元測定装置は、投影部と、撮像部と、制御部とを具備する。前記投影部は、照度を変化可能な照明を有し、前記照明からの光により測定対象物に縞を投影する。前記制御部は、前記撮像部により前記測定対象物の画像を撮像させ、撮像された前記測定対象物の画像から輝度値を取得し、取得された前記輝度値に基づいて、前記測定対象物に対して複数の検査ブロックを割り当て、割り当てられた前記検査ブロック毎に、前記照明の測定照度を決定し、決定された前記測定照度で、それぞれ、前記投影部により前記検査ブロックに対して縞を投影し、前記縞が投影された前記検査ブロックの縞画像を前記撮像部により撮像し、撮像された前記縞画像に基づいて前記測定対象物を3次元測定する。
(もっと読む)
接合継ぎ目を監視する光学測定装置、ならびに同測定装置を備える接合ヘッド及びレーザ溶接ヘッド
【課題】ワークピース内の接合領域を監視する光学測定装置を提供する。
【解決手段】光学測定装置100は、接合対象であるワークピース16の方向に光扇22を投射して、前記接合対象であるワークピースの接合領域10内に、その接合領域内の接合継ぎ目14と交差する三角測量光ライン24を生成するのに適した第1光源20を備える少なくとも一つの光切断装置18と、前記接合対象であるワークピースの接合領域を均一に照光する第2光源28を備える照光装置26と、接合継ぎ目上に投影された三角測量光ラインの空間分解画像を生成する、第1測定ビーム経路32を有する第1光センサ30と、接合継ぎ目の空間分解画像を生成する、第2測定ビーム経路36を有する第2光センサ34とを含み、第2測定ビーム経路は、第1測定ビーム経路内に同軸結合され、第1光センサの読み取り速度は1kHzを上回り、第2光センサの読み取り速度は500Hz未満である。
(もっと読む)
モーションキャプチャ装置およびモーションキャプチャプログラム
【課題】被測定者の動作の制約が少ない状態で舌の動きを計測することができるモーションキャプチャ装置およびモーションキャプチャプログラムを提供する。
【解決手段】モーションキャプチャ装置1は、被測定者Mの舌表面に貼付される磁気ソース10と、被測定者Mの顔表面に貼付され、磁気ソース10によって形成される磁場を検出する磁気センサ40と、被測定者の顔表面に貼付された磁気センサ40と同一の位置に配置された光学マーカ41と、光学マーカ41を異なる位置および異なる方向から撮影する複数の撮影装置60と、磁気センサ40によって検出された磁場の大きさと、撮影装置60によって撮影された光学マーカ41の画像とから、被測定者Mの舌表面に貼付された磁気ソース10の絶対座標を算出する座標算出手段70と、からなる。なお、磁気ソース10と磁気センサ40の位置は入れ替えてもよい。
(もっと読む)
光学式測定装置、プレス機、部品組合せ方法
【課題】小型化可能で高精度な形状測定が可能な光学式測定装置を提供する。
【解決手段】レーザ光源201が出力したビーム状の測定用光216は第2円錐ミラー207によって放射状の測定用光に変換され、ケース101の第2開口部102を通って出力された後、測定対象物220で反射され、第1開口部103を通ってケース101内へ入り、第1円錐ミラー209によって反射された後、受光レンズ213を介して光検出素子214で検出される。処理部240は、光検出素子214で検出された測定用光に基づいて測定対象物の形状を算出する。
(もっと読む)
計測装置、情報処理装置、計測方法、情報処理方法、および、プログラム
【課題】 三次元位置計測において、投影パターンのパターン形状を適切に設定することを目的とする。
【解決手段】 計測対象に対してパターン光を投影する投影手段と、前記パターン光が投影された前記計測対象を撮影し、前記計測対象の撮影画像を取得する撮影手段と、前記撮影画像と、前記投影手段の位置および姿勢と、前記撮影手段の位置および姿勢とに基づいて、前記計測対象の位置および/または姿勢を計測する計測手段と、前記計測対象の位置および/または姿勢の変動範囲に基づいて、以降に投影される前記パターン光のパターン形状を変更する変更手段と、を有することを特徴とする。
(もっと読む)
高さ計測装置及び方法
【課題】被計測物が様々な屈折率で、かつ様々な厚さの透明媒質の下に配置されていても、その被計測物の高さを容易に計測する。
【解決手段】高さ計測装置1は、照明光から分岐された第1照明光を被計測物6に導く対物レンズ24と、照明光から分岐された第2照明光を参照ミラー28に導く対物レンズ26と、第2照明光の光路長を調整する移動部36と、被計測物6及び参照ミラー28で反射される2つの照明光の干渉像を撮像する高速度カメラ12と、対物レンズ24と被計測物6とを光軸方向に相対移動するピエゾ駆動装置18と、を備える。
(もっと読む)
情報処理装置及び情報処理方法
【課題】撮像装置と計測対象物体との関係が高速に変化している場合であっても、物体の位置及び姿勢の計測を精度良く行えるようにする。
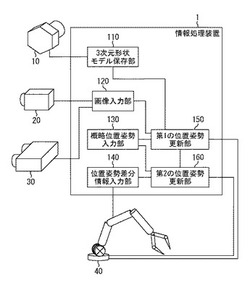
【解決手段】2次元画像及び距離画像が撮像可能な撮像装置20、30により、被測定物体の3次元的な位置姿勢を推定する情報処理装置1であって、被測定物体の位置姿勢推定用照合データを保存する位置姿勢推定用照合データ保存手段110と、撮像装置が第1の位置姿勢において撮影した2次元画像を入力する2次元画像入力手段120と、撮像装置が第2の位置姿勢において撮像した距離画像を入力する距離画像入力手段130と、第1の位置姿勢と第2の位置姿勢の相対位置姿勢情報である位置姿勢差分情報を取得する相対位置姿勢情報入力手段と、位置姿勢差分情報に基づき、2次元画像及び距離画像に対して、位置姿勢推定用照合データが当てはまるように被測定物体の位置姿勢を算出する位置姿勢推定手段160とを設ける。
(もっと読む)
位置確認システム
【課題】利用者による特別な動作が無くても利用者の位置を確認することが可能な位置確認システムを提供する。
【解決手段】位置確認システム1Aにおいて、発光装置20は、当該発光装置に固有の信号が含まれるように変調された光を発光し、受光装置30Aは、反射装置で反射した光を受光したときに、受光した光に含まれる信号を制御装置40へ出力し、制御装置40は、発光装置20に固有の信号と当該発光装置20の設置場所とが関連付けて記憶された記憶部41と、受光装置30Aから出力された信号を用いて記憶部41を参照することによって、信号に関連付けられた設置場所を記憶部41から読み出す位置確認部42と、を備える。
(もっと読む)
検査装置、リソグラフィ装置、リソグラフィプロセシングセルおよび検査方法
【課題】回折次数の重なりを防止しつつ基板の特性を精度良く求める技術を提供する。
【解決手段】角度分解分光法に対しては、4つのクアドラントを有する照明プロファイルを有する放射ビームが使用される。第1および第3クアドラントが照明される一方、第2および第4クアドラントは照明されない。したがって、結果として生じる瞳面は4つのクアドラントに分けられ、ゼロ次回折パターンのみが第1および第3クアドラントに現れて一次回折パターンのみが第2および第3クアドラントに現れる。
(もっと読む)
貨物自動車寸法測定装置、及び貨物自動車寸法測定方法
【目的】カメラやレーザー等の光学系手段を用いて測定効率の向上に貢献する手段を利用しつつ、さらに測定精度が高く、貨物自動車に関する的確なデータ管理が可能な貨物自動車寸法の測定装置及び測定方法とする。
【構成】貨物自動車の製造施設において、反射部を有するターゲット部と、所定位置に固定でターゲット部に反射される光を出力する複数の光学系手段と、反射光でターゲット部の座標位置を決定して貨物自動車の寸法を算定する制御部がある。ターゲット部の一部は、貨物自動車後方の灯火部に取り付けられている。光学系手段は、灯火部用のターゲット部に光を出力する灯火部用光学系手段を含む。ターゲット部の反射光データは制御部に入力され、貨物自動車の全長、全幅又は全高の少なくとも一つが算定され、灯火部用光学系手段の撮影データに基づいて灯火部の取り付け位置が算定される。
(もっと読む)
部品実装システム及び部品実装システムにおける検査用画像の生成方法
【課題】撮像対象とする電子部品がチップ部品である場合であっても基板への装着状態の検査を精度よく行うことができるようにした部品実装システム及び部品実装システムにおける検査用画像の生成方法を提供することを目的とする。
【解決手段】検査ヘッド40の光電変換素子40aが出力したアナログ信号をA/D変換して輝度値を表す所定のビット数のディジタル信号を生成するA/D変換部40b、A/D変換部40bが生成したディジタル信号から、撮像対象となる部品4の種類に応じて可変的に設定された一又は複数のビットを省いてA/D変換部40bによりA/D変換したときよりも少ないビット数のディジタル信号に圧縮する信号圧縮部40c及び信号圧縮部40cが圧縮したディジタル信号に基づいて検査用画像を生成する画像生成部40dを備え、部品4がチップ部品である場合には、ディジタル信号の圧縮時に省くビットを上位側ビットに設定する。
(もっと読む)
3次元シーンの要素の奥行きを評価する装置
【課題】3次元シーンに分布した被写体要素(object element)の奥行きを評価するための有利な装置を提案すること。
【解決手段】装置は、光学系であって、それ自体が、複数の画素21、22、23を有する光センサ2、および光センサの画素の1つの上にシーンの要素E1、E2、E3を結像できるレンズ1を備える光学系と、この要素からきてビットマップ方式の光センサの画素のうちの1つによって取り込まれた光のストリームの最大値に着目することによって焦点を調整できるシーンの要素のいずれか1つに光学系の焦点を調整する手段と、この焦点の調節からこの要素の奥行きを推定するのに適した手段とを備える。
(もっと読む)
温度計測システム、基板処理装置及び温度計測方法
【課題】光干渉を利用して温度を適切に測定することができる温度計測システム、基板処理装置及び温度計測方法を提供する。
【解決手段】温度計測システム1は、光源10、分光器14、光伝達機構11,12、光路長算出部16及び温度算出部20を備える。光源10は、測定光を発生させる。光伝達機構11,12は、測定対象物13の表面13a及び裏面13bからの反射光を分光器14へ出射する。分光器14は、反射光の強度分布である干渉強度分布を測定する。光路長算出部16は、フーリエ変換し光路長を算出する。温度算出部20は、光路長と温度との関係に基づいて測定対象物13の温度を算出する。光源10は、分光器14の波長スパンΔwに基づいた条件を満たす半値半幅Δλの光源スペクトルを有する。分光器14は、波長スパンΔwと計測最大厚さdとに基づいた条件を満たすサンプリング数Ncで強度分布を測定する。
(もっと読む)
3次元計測装置と3次元計測方法
【課題】ライン光が撮影手段に向けて正反射されることがなく、撮影が困難になることを防止する。
【解決手段】被検査体1にライン光4を照射して両者を相対移動させながら撮影手段26で撮影することにより、光切断法によって被検査体1を3次元計測することができる。上記被検査体1は、ワークに予め定められた配列方向Aに配列して設けられた複数の凹凸状部分3を有しており、この凹凸状部分3は、上記配列方向Aと直交する方向の直線部分3aを有している。上記ライン光4の相対移動方向Bと、この相対移動方向に対するライン光の角度θとは、該ライン光4が上記直線部分3aに対して斜めに交差して照射されながら相対移動されるように予め設定されている。
(もっと読む)
撮像装置及びこれを備えた物体検出装置並びに偏光フィルタ
【課題】湾曲面からの反射光を適切にカットし又は湾曲面からの反射光を適切に選択して透過させることを課題とする。
【解決手段】湾曲したフロントガラス面に対する相対位置が一定となるように設置され、そのフロントガラス面からの反射光(水平偏光成分S)をカットする鉛直偏光領域を備えた偏光フィルタ層を介して、撮像領域からの光を画像センサ206上の各撮像画素で受光して撮像する撮像装置において、上記鉛直偏光領域は、透過軸方向が異なる複数のフィルタ領域部分から構成されており、各フィルタ領域部分の透過軸方向は、当該フィルタ領域部分へ入射してくるフロントガラス面上からの反射光の最大偏光成分の偏光方向に基づいて設定される。
(もっと読む)
外観検査方法及びその装置
【課題】複雑形状をした物体の外観検査において、目視では検出困難な形状の不良を定量的に評価し、検出する物体の外観検査方法及びその装置を提供することにある。
【解決手段】
物体の外観を検査する方法を、検査対象物体を載置して少なくとも一方向に連続的に移動させながら検査対象物体を撮像して検査対象物体の表面のテクスチャ情報を含む検査対象物体の画像を取得しながら検査対象物体の表面凹凸情報を取得し、この取得した検査対象物体の表面凹凸情報から検査対象物体の立体形状を復元し、取得した画像と復元した検査対象物体の立体形状とから表面テクスチャを持った物体の外観情報を得、この得られた外観情報から複数の特徴を抽出し、この抽出した複数の特徴のうち少なくとも1つの特徴を予め設定した参照データの前記少なくとも1つの特徴に対応する特徴と比較して検査対象となる物体の外観を評価するようにした。
(もっと読む)
画像計測装置及びコンピュータプログラム
【課題】計測結果が計測対象物のどの部分のどの計測結果であるのかを使用者が的確に把握することができる画像計測装置及びコンピュータプログラムを提供する。
【解決手段】撮像手段で取得した計測対象物の画像を表示し、表示された画像上で特徴画像、及び計測位置の指定を受け付ける。指定を受け付けた特徴画像と、計測位置及び該計測位置を示す寸法線の表示位置を表す、特徴画像に対する相対位置に関する情報とを記憶しておく。新たに取得した計測対象物の画像と記憶してある特徴画像とを照合し、計測対象物の画像の姿勢及び位置に関する情報を特定する。姿勢及び位置が特定された計測対象物の画像に対して計測位置を設定し、該計測位置のエッジ部分を検出して、所定の物理量を計測する。記憶された寸法線を表示する特徴画像に対する相対位置に関する情報に基づいて、計測位置を示す寸法線及び計測結果を所定の位置に表示する。
(もっと読む)
画像センサのチルトを求めるための方法
【課題】カメラに取り付けられた画像センサのチルトを求めるための、改善された方法を提供する。
【解決手段】カメラ12における画像センサ10表面の、カメラ12のレンズ基準面26に対するチルトを求めるための方法であり、画像センサ10に光を送るステップと、画像センサ10から反射した光を受けるステップと、反射光における干渉パターンを特定するステップと、干渉パターンの特徴を特定するステップと、干渉パターンにおいて特定された特徴の位置に基づいて画像センサ10表面のチルトを求めるステップとを含む。
(もっと読む)
欠陥計測方法
【課題】光学素子の欠陥を簡便に発見、測定することのできる欠陥計測方法を提供する。
【解決手段】第一の観点に係る欠陥計測方法は、測定対象に光源から光を照射し、収束光にして測定対象に入射し、測定対象又は光源を、収束光の焦点が測定対象の一方の面から他方の面に至るまで移動させ、測定対象の一方の面と測定対象中に存在した欠陥との間の距離を計測し、距離に測定対象の屈折率を乗じた値を求め、一方の面からの前記欠陥の深さを計算する。
(もっと読む)
241 - 260 / 5,630
[ Back to top ]